0 -【STM32L0】开发板编程总结
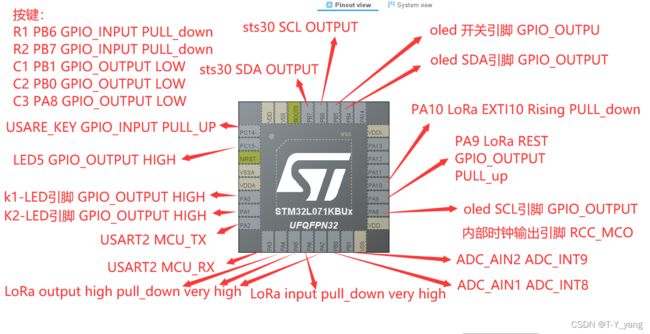
开发板GPIO概览图
基础实验所用函数
GPIO输出函数
stm32l0xx_hal_gpio.c
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_15, GPIO_PIN_RESET);
GPIO输入函数
stm32l0xx_hal_gpio.c
HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_14);
GPIO反转函数
stm32l0xx_hal_gpio.c
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_15);
ms级延时函数
stm32l0xx_hal.c
HAL_Delay(100);
系统复位函数
stm32l0xx_hal_cortex.c
HAL_NVIC_SystemReset();
EEPROM写代码
stm32l0xx_hal_flash_ex.c
void EEPROM_Write(uint32_t address, uint32_t *buff, uint32_t len)
{
HAL_FLASHEx_DATAEEPROM_Unlock();
HAL_FLASHEx_DATAEEPROM_Program(FLASH_TYPEPROGRAMDATA_WORD, address + DATA_EEPROM_BASE, *buff);
HAL_FLASHEx_DATAEEPROM_Lock();
}
EEPROM读代码
stm32l0xx_hal_flash_ex.c
void EEPROM_Read(uint32_t address, uint32_t *buff, uint32_t len)
{
uint32_t *read_address;
read_address = (uint32_t *)(address + DATA_EEPROM_BASE);
HAL_FLASHEx_DATAEEPROM_Unlock();
while(len--)
{
*buff++ = *read_address++;
}
HAL_FLASHEx_DATAEEPROM_Lock();
}
CRC校验函数
stm32l0xx_hal_crc.c
crc_check = HAL_CRC_Calculate(&hcrc, (uint32_t *)VALUE, 2);
DMA函数
stm32l0xx_hal_dma.c
HAL_DMA_Start(&hdma_memtomem_dma1_channel1,
(uint32_t)Source_Data, (uint32_t)Destination_Data, 20);
EXTI外部中断函数
stm32l0xx_hal_gpio.c
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_15);
}
ADC检测函数
stm32l0xx_hal_adc.c
HAL_ADC_Start(&hadc);
ADC_Value = HAL_ADC_GetValue(&hadc) * (3.3 / 4095);
LPTIM1定时器代码
stm32l0xx_hal_lptim.c
#define PERIOD 2500 // 系统时钟是32MHz,分频128,那么计时器的时钟是250000Hz。
// 计数器值设为2500,计时器100次进入中断,总的计数是250000,刚好是1s。
HAL_LPTIM_Counter_Start_IT(&hlptim1, PERIOD);
void HAL_LPTIM_AutoReloadMatchCallback(LPTIM_HandleTypeDef *hlptim)
{
}
UASART串口收发代码
串口重定向
stdio.h
int fputc(int ch, FILE *f)
{
while((USART2->ISR&(1<<7))==0);
USART2->TDR = (uint8_t)ch;
return ch;
}
char data[50] = "GXCT IOT USART TEST TX";
printf("%s\n", data);
通过串口中断接收数据
stm32l0xx_hal_uart.c
HAL_UART_Receive_IT(&huart2, recv_data, 1);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
printf("%s", recv_data);
HAL_UART_Receive_IT(&huart2, recv_data, 1);
}
接收不定长数据
main.c
传递变量
uint8_t recv_buf[256] = {0};
extern uint8_t data[256];
extern uint16_t count;
使能中断
/* USER CODE BEGIN 2 */
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE);
HAL_UART_Receive_IT(&huart2, recv_buf, 1);
/* USER CODE END 2 */
stm32l0xx_it.c
定义变量
uint8_t data[256] = {0};
uint16_t count = 0;
编写中断处理函数
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_RXNE)==SET)
{
data[count] = USART2->RDR;
if(data[count] == 'M')
{
count = 0;
data[count++] = 'M';
}
else
{
count++;
}
}
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
外设实验所用函数
OLED初始化代码
void Task_BrdInit(void)
{
OLED_PowerControl(ENABLE);
HAL_Delay(200);
OLED_Init();
OLED_Clear();
OLED_ShowString(0, 0, (unsigned char *)" ", 16);
OLED_ShowString(0, 2, (unsigned char *)" ", 16);
}
key按键代码
key.h
#ifndef _KEY_H_
#define _KEY_H_
#include "stm32l0xx_hal.h"
//函数声明
void key_pin_init(void);
void Keyboard_Init(void);
uint8_t Row_Scan(void);
uint8_t Keyboard_Scan(void);
uint8_t USER_Scan(void);
//按键操作宏定义
#define Read_Row_1 HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_6)
#define Read_Row_2 HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)
#define Write_Col_1_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET)
#define Write_Col_1_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET)
#define Write_Col_2_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET)
#define Write_Col_2_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET)
#define Write_Col_3_HIGH HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET)
#define Write_Col_3_LOW HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET)
#endif
key.c
#include "key.h"
/*矩阵按键引脚初始化*/
void key_pin_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1, GPIO_PIN_RESET);
/*Configure GPIO pins : PA8*/
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : PB0 PB1 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PB6 PB7 */
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/*矩阵按键扫描初始化,将引脚配置成下拉输出模式*/
void Keyboard_Init(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
}
/*USER按键扫描函数*/
/*按下返回1,松开返回0*/
uint8_t USER_Scan(void)
{
uint8_t key_stat = 0;
key_stat = HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_14);
HAL_Delay(100);
key_stat = HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_14);
if(!key_stat)
{
return 1;
}
else
{
return 0;
}
}
/*矩阵按键行扫描*/
uint8_t count = 0;
uint8_t Row_Scan(void)
{
//定义两个行值
uint8_t Row1=0;
uint8_t Row2=0;
//读取两个行引脚状态
Row1 = Read_Row_1;
Row2 = Read_Row_2;
if(Row1)
{
return 1;
}
if(Row2)
{
return 2;
}
return 0;
}
/*矩阵按键键值扫描*/
uint8_t Keyboard_Scan(void)
{
uint8_t Row_Value = 0;
uint8_t key_Value = 0;
Keyboard_Init();
Write_Col_3_HIGH;
Row_Value = Row_Scan();
if(Row_Value)
{
switch(Row_Value)
{
case 1:
key_Value = 3;
break;
case 2:
key_Value = 6;
break;
default:
break;
}
}
Write_Col_1_HIGH;
Write_Col_3_LOW;
Row_Value = Row_Scan();
if(Row_Value)
{
switch(Row_Value)
{
case 1:
key_Value = 1;
break;
case 2:
key_Value = 4;
break;
default:
break;
}
}
Write_Col_1_LOW;
Write_Col_2_HIGH;
Row_Value = Row_Scan();
if(Row_Value)
{
switch(Row_Value)
{
case 1:
key_Value = 2;
break;
case 2:
key_Value = 5;
break;
default:
break;
}
}
return key_Value;
}
PWM输出代码
stm32l0xx_hal_tim.c
TIM3->CCR3 = key_num * 10;
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_3);
RTC实现代码
void Task_Main(void)
{
RTC_DateTypeDef NowDate;
RTC_TimeTypeDef NowTime;
char oled_dis_Date[16];
char oled_dis_Time[16];
HAL_RTC_GetDate(&hrtc, &NowDate, RTC_FORMAT_BIN);
HAL_RTC_GetTime(&hrtc, &NowTime, RTC_FORMAT_BIN);
sprintf(oled_dis_Date, " %02d - %02d - %02d ", NowDate.Year, NowDate.Month, NowDate.Date);
sprintf(oled_dis_Time, " %02d : %02d : %02d ", NowTime.Hours, NowTime.Minutes, NowTime.Seconds);
OLED_ShowString(0, 0, (unsigned char *)oled_dis_Date, 16);
OLED_ShowString(0, 2, (unsigned char *)oled_dis_Time, 16);
}
ADC检测代码
stm32l0xx_hal_adc.c
HAL_ADC_Start_DMA(&hadc, ADC_DMA_Value, 10);
STS30温度采集代码
STS30.h
#ifndef _STS30_H
#define _STS30_H
#include "iic_sensor.h"
float Get_Temperature(void);
#endif
STS30.c
#include "sts30.h"
float Get_Temperature(void)
{
uint8_t H_VALUE, L_VALUE, CRC_VALUE;
uint16_t T_VALUE; //转换完成的数字值
float temperature;//转换完成的温度值
Sensor_I2CStart();
Sensor_I2CSendByte(0x4A << 1);
Sensor_I2CWaitAck();
Sensor_I2CSendByte(0x24);//不使能时钟伸缩
Sensor_I2CWaitAck();
Sensor_I2CSendByte(0x0b);//中重复性测量精度
Sensor_I2CWaitAck();
Sensor_I2CStop();
HAL_Delay(2);//scl free,最小为1ms
Sensor_I2CStart();
Sensor_I2CSendByte(0x4A << 1 | 1);
Sensor_I2CWaitAck();
Sensor_I2CStop();
HAL_Delay(2);//scl free,最小为1ms
Sensor_I2CStart();
Sensor_I2CSendByte(0x4A << 1 | 1);
Sensor_I2CWaitAck();
H_VALUE = Sensor_I2CReceiveByte();
Sensor_I2CSendAck();
L_VALUE = Sensor_I2CReceiveByte();
Sensor_I2CSendAck();
CRC_VALUE = Sensor_I2CReceiveByte();
Sensor_I2CSendNotAck();
Sensor_I2CStop();
if (CRC_VALUE)
{
;
}
T_VALUE = H_VALUE << 8 | L_VALUE;
temperature = -45 + 175.0 * T_VALUE / 65535;
return (temperature);
}