《数字图像处理》第三章 灰度变换和空间滤波 学习笔记附部分例子代码(C++ & opencv)
灰度变换和空间滤波
-
- 前言
- 1. 变换和滤波基础
- 2. 一些基本的灰度变换函数
-
- 2.1 图像反转:
- 2.2 对数变换:
- 2.3 幂律变换:
- 2.4 分段线性变换函数:
- 3. 直方图处理
-
- 3.1 直方图均衡化
- 3.2 直方图匹配
- 4. 空间滤波基础
-
- 4.1 空间滤波原理
- 4.2 空间相关与卷积
- 5. 平滑空间滤波器
-
- 5.1 平滑线性滤波
- 5.2 统计排序(非线性)滤波器
- opencv的补充:
前言
本系列博客参考书为, 数字图像处理第三版-冈萨雷斯
第三版教材中图片下载地址: book images downloads
vs2019配置opencv可以查看:VS2019 & Opencv4.5.4配置教程
后续剧情:
数字图像处理 第四章 频率域滤波 学习笔记
数字图像处理 第六章 彩色图像处理 学习笔记
数字图像处理 第七章 小波域多分辨率处理 学习笔记
数字图像处理 第九章 形态学图像处理 学习笔记
数字图像处理 第十章 图像分割 学习笔记
数字图像处理 第11章 表示和描述 学习笔记
1. 变换和滤波基础
空间域处理表示为:
g ( x , y ) = T [ f ( x , y ) ] g(x, y)=T[f(x, y)] g(x,y)=T[f(x,y)]
其中f(x, y)是输入图像, g(x, y)是处理后的图像, T是在点(x, y)的邻域上关于f的一中算子.
灰度变换函数: s = T ( r ) s=T(r) s=T(r), 其中r是输入图像任意点的灰度, s表示输出后的灰度.
2. 一些基本的灰度变换函数
2.1 图像反转:
- s = L − 1 − r s=L-1-r s=L−1−r
- 适用于增强嵌入在暗区域中的白色或灰色区域
- 特别是当黑色面积占主导地位.
opencv中使用到的是bitwise_not函数
void inversionImage(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
if (img.empty()) {
cerr << "Could not open or find the image!" << std::endl;
return;
}
Mat in_img;
bitwise_not(img, in_img); //图像反转操作, 对应课本的式(3.2-1)
Mat com_img;
hconcat(img, in_img, com_img); //拼接图像
imshow("Inverted Gray Image", com_img); //输出拼接图像
waitKey(0);
}
运行结果如下:

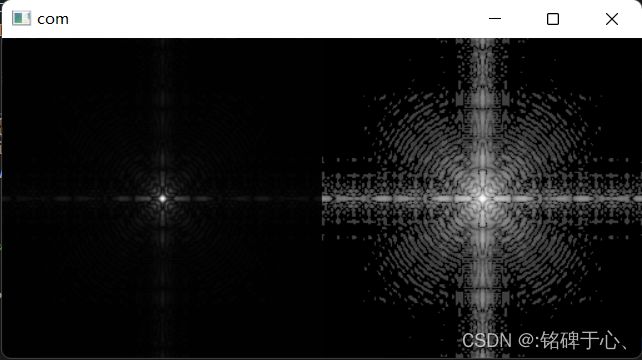
2.2 对数变换:
-
s = c l o g ( 1 + r ) s=clog(1+r) s=clog(1+r)
-
完成图像灰度级的扩展或压缩
-
作用于图像的傅里叶频谱, 会丰富细节
opencv中使用add函数和log函数实现
Mat logTransform(Mat input, int c) {
//add(input, Scalar(1.0), input);
input.convertTo(input, CV_32F);
Mat result;
log(1.0 + input, result); //默认以10为底
//归一化到0-255范围
normalize(result, result, 0, 255, NORM_MINMAX);
result = c * result;
result.convertTo(result, CV_8U);
return result;
}
2.3 幂律变换:
- s = c r γ s=cr^{γ} s=crγ
- 部分γ值的幂律曲线将较窄范围的暗色输入值映射为较宽范围
- 用于"伽马校正".
- 进行对比度增强: 1)对于整体偏暗的图像, 选择伽马值小于1的来完成变换; 2)而对于遭到"冲淡"的图像, 伽马值选择大于1的值.
Mat gammaTransform(Mat input, float gamma, int c) {
input.convertTo(input, CV_32F);
Mat result;
pow(input / 255.0, gamma, result);
result = c * result;
normalize(result, result, 0, 255, NORM_MINMAX);
result.convertTo(result, CV_8U); //转成uint8格式, 合并操作需要俩图片数据类型一样
return result;
}
左图, gamma选择0.4, 右图gamma选择4.1; c均选择为1

2.4 分段线性变换函数:
- 对比度拉伸:
- 灰度级分层:
- 比特平面分层:
// layerNum的取值范围为1~8
Mat layerTransform(Mat input, uchar layerNum) {
Mat result;
uchar bits = 1 << (layerNum - 1);
result = input & bits;
result = result * 255;
return result;
}
重构也很简单
Mat layer6 = img & 32;
Mat layer7 = img & 64;
Mat layer8 = img & 128;
Mat reconstract = (layer6 + layer7 + layer8);
imshow("layer6+7+8", reconstract);
waitKey(0);

3. 直方图处理
直方图用离散函数表示: p ( r k ) = n k / M N p(r_{k})=n_{k}/MN p(rk)=nk/MN, 其中rk表示第k级灰度值, nk表示图像中灰度为rk的像素个数.
注意: 均值是平均灰度的度量, 方差(或标准差)是图像对比度的度量. 得到直方图, 就能求出这俩个计算的值.
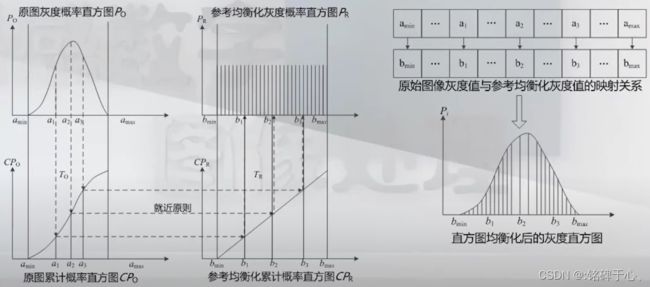
3.1 直方图均衡化
均质化是直方图匹配的一种特殊情况, 对图像重新分配像素值, 使一定范围内的像素值数量大致相同.
优点: 适用于背景和前景都太暗或太亮的图像, 以及曝光过度或曝光不足的图像.
缺点: 可能会增加背景噪声的对比度并且降低有用信号的对比度, 导致对比度过分增强.
原始图和参考图中的灰度累积概率使用就近原则建立关系.
均衡化的实现:
-
如果原图像的灰度值a的累积概率为 C P a CP_{a} CPa, 则该累积概率值所对应的等概率分布图像的灰度值为 ( b m a x − b m i n ) × C P a + b m i n (b_{max}-b_{min})×CP_{a} + b_{min} (bmax−bmin)×CPa+bmin, 其中 b m a x , b m i n b_{max}, b_{min} bmax,bmin分别为预期要得到的灰度最大值和最小值.
-

opencv具体代码实现:
Mat img = imread(path, IMREAD_GRAYSCALE);
Mat result;
equalizeHist(img, result);
Mat com_img;
hconcat(img, result, com_img); //拼接图像
imshow("equalizeHist Image", com_img);
waitKey(0);
局部直方图均衡:
Mat localEqualizeHist(Mat input, int blockSize) {
Mat result = input.clone();
for (int y = 0; y + blockSize < result.rows; y += blockSize) {
for (int x = 0; x + blockSize < result.cols; x += blockSize) {
Mat localImg(result, Rect(x, y, blockSize, blockSize)); //见博客结尾补充第二点
equalizeHist(localImg, localImg);
}
}
return result;
}
void test(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
Mat histResult;
equalizeHist(img, histResult);
Mat localHistRes = localEqualizeHist(img, 3);
Mat comImg;
hconcat(img, histResult, comImg); //拼接图像
hconcat(comImg, localHistRes, comImg);
imshow("equalizeHist Image", comImg);
waitKey(0);
}

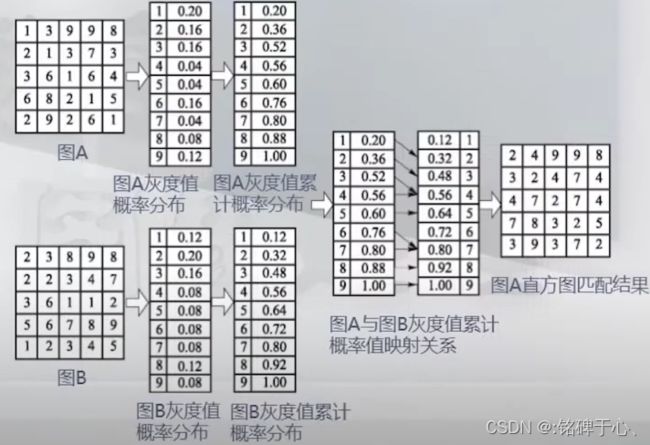
3.2 直方图匹配
示例: 图A为原始图像, 图B为参考图像
此图演示的是概率值往大的方向就近, 所以图A的"1"与图B的"2"建立联系
直方图匹配大多数时候都是试凑过程.
4. 空间滤波基础
4.1 空间滤波原理
滤波产生一个新像素, 新像素的坐标等于邻域中心的坐标, 像素的值是滤波操作的结果.若执行的是线性操作, 则该滤波器称为线性空间滤波器, 反之, 则相反. 滤波器作用的结果主要与滤波器系数和大小有关.
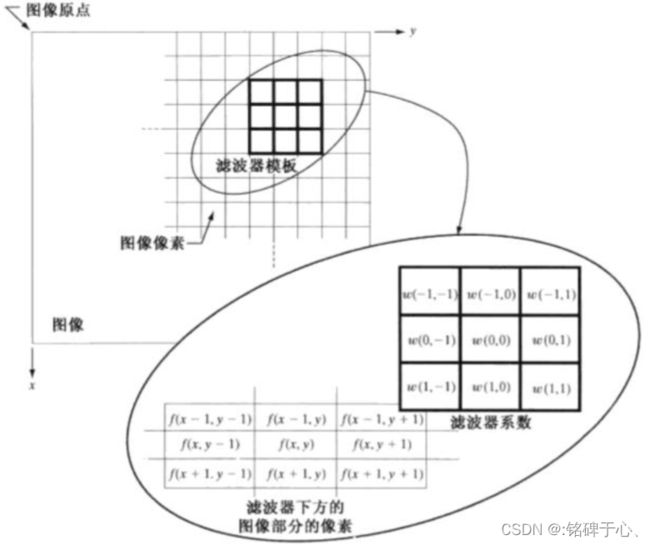
4.2 空间相关与卷积
相关: 滤波器模板移过图像并计算每个位置乘积之和的处理.
- w ( x , y ) ☆ f ( x , y ) = ∑ s = − a a ∑ t = − b b w ( s , t ) f ( x + s , y + t ) w(x,y)☆f(x,y)=\sum_{s=-a}^{a}\sum_{t=-b}^{b}w(s,t)f(x+s,y+t) w(x,y)☆f(x,y)=∑s=−aa∑t=−bbw(s,t)f(x+s,y+t)
卷积: 机制类似, 但首先要把滤波器旋转180度.
- w ( x , y ) ★ f ( x , y ) = ∑ s = − a a ∑ t = − b b w ( s , t ) f ( x − s , y − t ) w(x,y)★f(x,y)=\sum_{s=-a}^{a}\sum_{t=-b}^{b}w(s,t)f(x-s,y-t) w(x,y)★f(x,y)=∑s=−aa∑t=−bbw(s,t)f(x−s,y−t)
注意: 在图像处理文献中,您很可能会遇到卷积滤波器、卷积模板或卷积核这些术语, 但是这些滤波器未必用到真正的卷积, 要避免混淆.
5. 平滑空间滤波器
通常用于模糊处理和降低噪声.
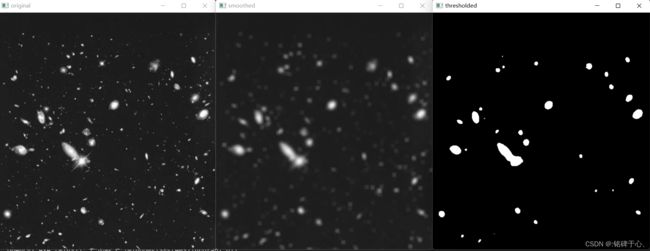
5.1 平滑线性滤波
opencv实现直接调用blur函数即可.
Mat smoothFilter(Mat input, int blockSize) {
Mat result;
// 下图使用的滑动块大小为9
blur(input, result, Size(blockSize, blockSize));
Mat thresholdedImg;
//表示灰度值大于105的像素设置为255(最大值).
threshold(result, thresholdedImg, 105, 255, THRESH_BINARY);
imshow("original", input);
imshow("smoothed", result);
imshow("thresholded", thresholdedImg);
waitKey(0);
return result;
}
5.2 统计排序(非线性)滤波器
本节主要介绍中值滤波器, 该类滤波器对于处理脉冲噪声(椒盐噪声)非常有效. 具体流程为, 首先将邻域内的像素分类排序, 确定其中值, 将该中值赋予滤波后的对应像素点. 例如, 对于3x3的邻域, 中值为第5大的值.
opencv使用medianBlur函数即可, 但注意, 其滤波核的大小必须为奇数.
opencv的补充:
- 使用
cv::Mat::isContinously()来判断图像矩阵是否以连续方式存储 - 为了避免很大的图像进行不必要的复制, 每个Mat对象都有自己的表头, 复制运算符只复制标头和指向大矩阵的指针, 而不是数据本身.
例: 在一个大图像上创建感兴趣的区域.
Mat D (A, Rect(10, 10, 100, 100) ); //使用矩阵完成
Mat E = A(Range::all(), Range(1,3)); //使用行, 列完成边界
// 此时修改D或E, 同样会修改矩阵A中对应区域的值.