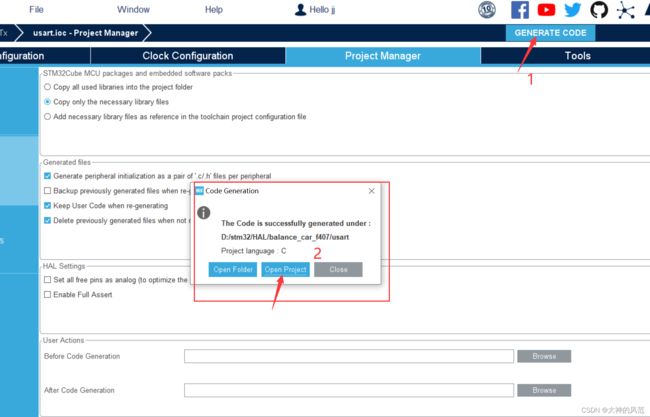
(三)STM32F407 cubemx串口中断通讯
(三)STM32F407 cubemx串口中断通讯
这篇文章主要是个人的学习经验,想分享出来供大家提供思路,如果其中有不足之处请批评指正哈。
废话不多说直接开始主题,本人是基于STM32F407VET6芯片,但是意在你看懂这篇文章后,不管是F1,F4,H7等一系列系统串口通讯配置都能明白如何通过参考手册去学习配置。而不是Ctrl c,Ctrl v。
串口通讯其实cubemx已经把步骤精简的不能再精简了,但是秉持着不断学习的理念,有必要去大概学习一下串口协议,以及cubemx是如何根据参考手册封装的。
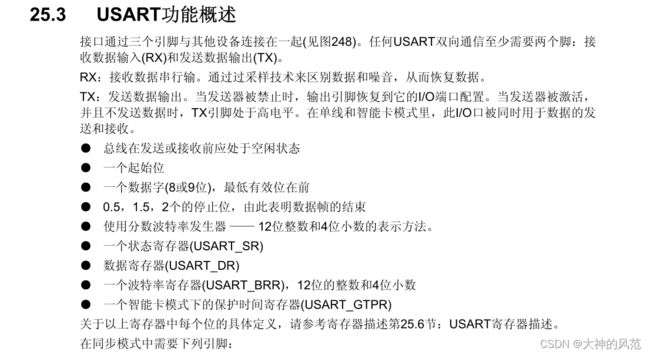 以上是串口协议比较重要的几个点,跟着参考手册一个一个点的讲解,了解串口协议的重点。首先串口主要有3根线TX、RX、GND。根据以上的几个点知一个串口数据包主要由1.起始位 2.数据字 3.停止位构成其他的寄存器都是围绕它们为它们服务。
以上是串口协议比较重要的几个点,跟着参考手册一个一个点的讲解,了解串口协议的重点。首先串口主要有3根线TX、RX、GND。根据以上的几个点知一个串口数据包主要由1.起始位 2.数据字 3.停止位构成其他的寄存器都是围绕它们为它们服务。
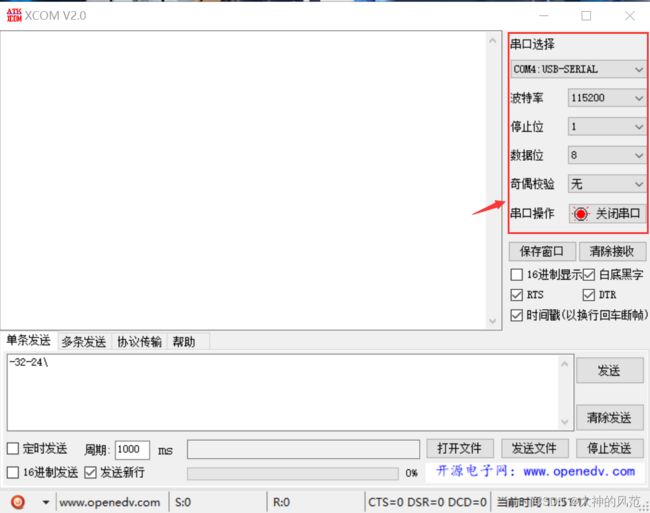 接下来我将参照串口助手一步步讲解。
接下来我将参照串口助手一步步讲解。

1)波特率
发送和接收由一共用的波特率发生器驱动,当发送器和接收器的使能位分别置位时,分别为其产生时钟。波特率从某种意义上来说,它就是时钟的一种表现形式,115200意思是1秒内产生115200个高低电平变化。一个8位字长的串口数据=8字长+1起始位+1停止位=10;也就是1秒钟能发送115200/10=11520个数据,也就是1/11520=86us平均86us发一个‘A’(数据)。
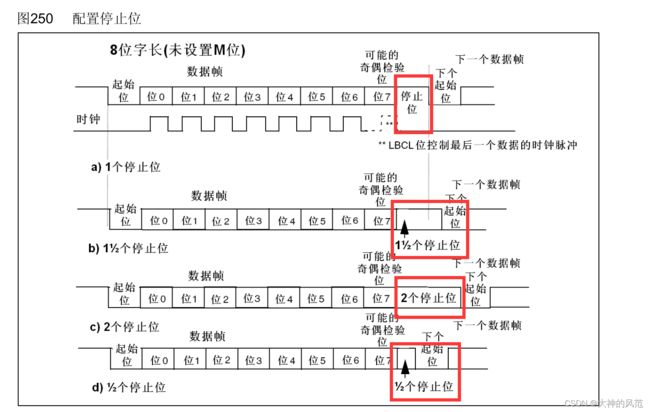 2)停止位
2)停止位
USART支持多种停止位的配置:0.5、1、1.5和2个停止位。
1.1个停止位:停止位位数的默认值。
2.2个停止位:可用于常规USART模式、单线模式以及调制解调器模式
3. 0.5个停止位:在智能卡模式下接收数据时使用。
4.1.5个停止位:在智能卡模式下发送和接收数据时使用。空闲帧包括了停止位
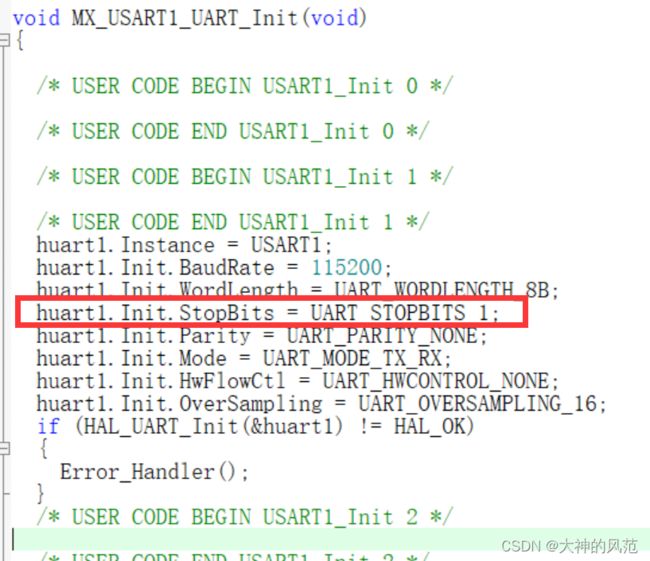
 停止位是通讯双方需要一致的,通常情况都是默认为1。在USART__CR2中编程停止位的位数。
停止位是通讯双方需要一致的,通常情况都是默认为1。在USART__CR2中编程停止位的位数。
若停止位需要更改长度
方一cubemx自动配置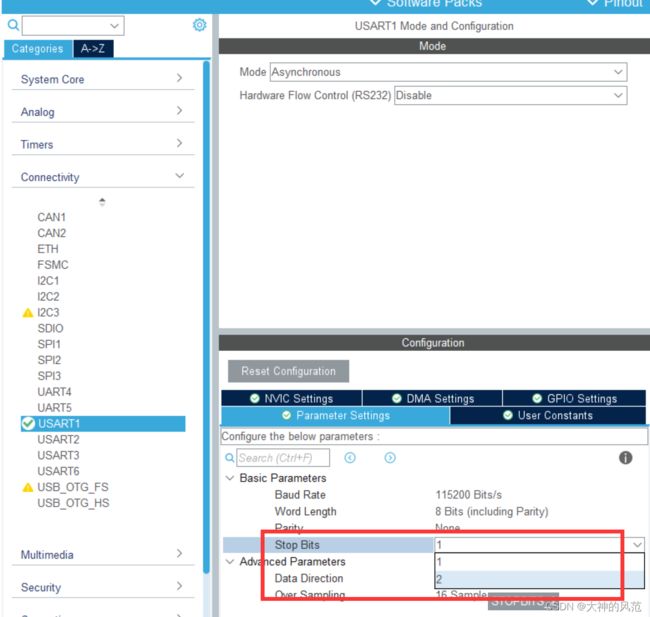
方二代码hal库代码调用
 hal库只提供了两种一个停止位,和两个停止位的定义
hal库只提供了两种一个停止位,和两个停止位的定义
3)起始位中断信号产生
在USART中,如果辨认出一个特殊的采样序列,那么就认为侦测到一个起始位。该序列为:1110X0X0X0000
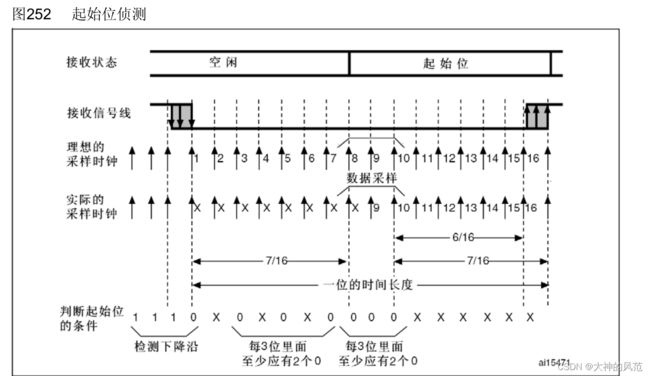
起始位的开始标志是1110低电平下降沿,当下降沿触发时它会间隔采样,X就是它采样的信号是不确定的,但是若需要进入串口中断必须每一次采样的X(采样点为3,5,7,8,9,10)都为0才可确认收到起始位,这时设置RXNE标志位,如果RXNEIE=1,则产生中断。若其中采样X为1不管什么原因,返回空闲状态等待下降沿。
4)数据位
USART可以根据USART_CR1的M位接收8位或9位的数据字
8位数据的信号是和ASCLL码表一一对应的比如‘A’=65=0x41=01000001 8位传输的数据就是低高低低低低低高

5)奇偶校验
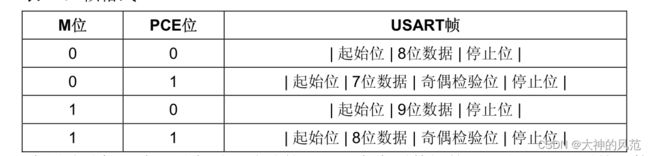
设置USART_CR1寄存器上的PCE位,可以使能奇偶控制(发送时生成一个奇偶位,接收时进行奇偶校验)。根据M位定义的帧长度,可能的USART帧格式列在下表中。
 偶校验:校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为偶数。
偶校验:校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为偶数。
例如:数据=00110101,有4个1’,如果选择偶校验(在USART_CR1中的PS=0),校验位将是’0’。4个1凑个偶数,校验位为0
奇校验:此校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为奇数。
例如:数据=00110101,有4个’1’,如果选择奇校验(在USART_CR1中的PS=1),校验位将是’1’。4个1凑个奇数,还需一个1,校验位为1
这是参考手册的例子很清楚,但是可能是自己才疏学浅本人并不知道校验位有什么很大的作用,有大佬的话可以评论区指导一下。
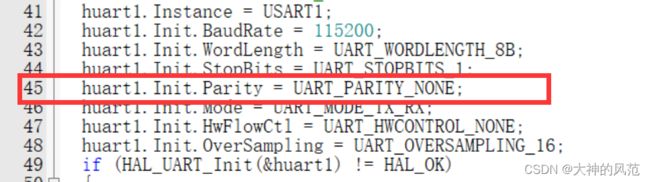
我们默认使用的是第一种00

0x0000u这样的常数一律默认为int型0,不是什么字节。
关键内容讲完了开始cubemx配置实现功能
基础时钟配置等请见:http://t.csdnimg.cn/XQ0L6
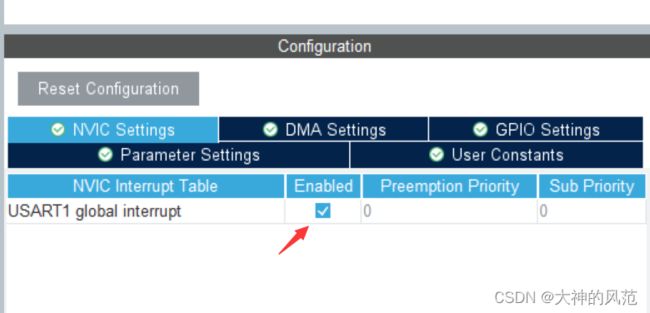
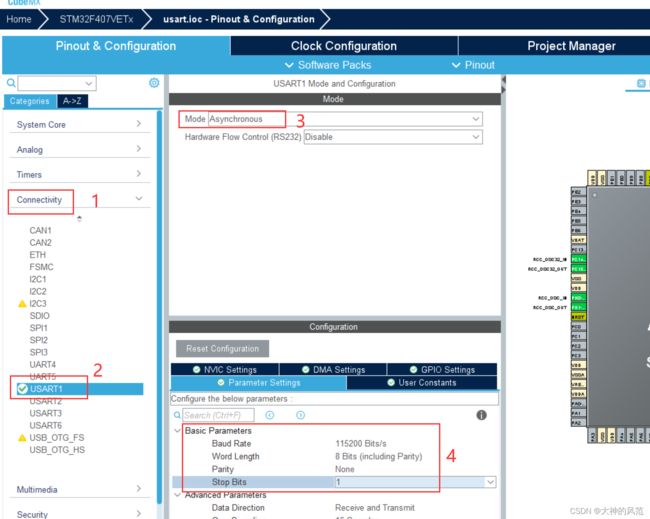 中断勾上
中断勾上
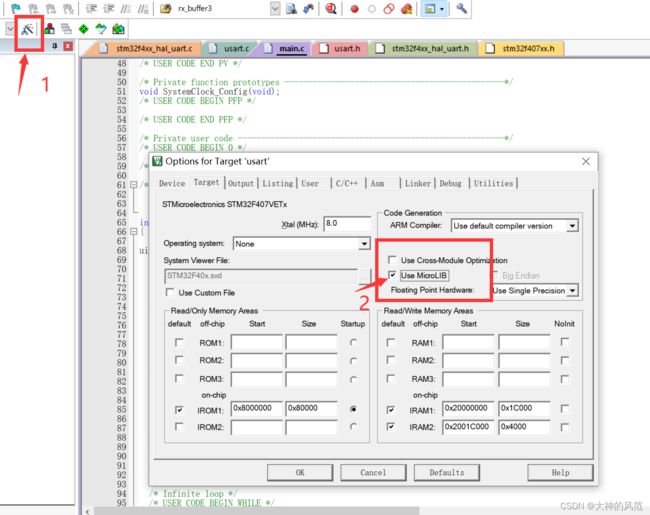
keil5处点击魔术棒,给红框处打上勾。

dubug处我用的下载器是DAP可能和你们的不一样,勾上重新下载程序后复位功能。
uint8_t AA='A';
HAL_UART_Transmit(&huart1,&AA,1,10000);
HAL_UART_Transmit函数语法很简单,只要配置串口号,内容,内容长度,发送时间即可
主函数
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint8_t AA='A';
HAL_UART_Transmit(&huart1,&AA,1,10000);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
考虑到重定义函数printf只有一个串口可用,本人给大家提供了printf转译其他串口也可使用printf
主函数部分
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include usart.h
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __USART_H__
#define __USART_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
#include usart.c
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
__align(8) char Usart1_TxBuff[USART1_TXBUFF_SIZE];
void u1_printf(char* fmt,...)
{
unsigned int i,length;
va_list ap;
va_start(ap,fmt);
vsprintf(Usart1_TxBuff,fmt,ap);
va_end(ap);
length=strlen((const char*)Usart1_TxBuff);
while((USART1->SR&0X40)==0);
for(i = 0;i < length;i ++)
{
USART1->DR = Usart1_TxBuff[i];
while((USART1->SR&0X40)==0);
}
}
/* USER CODE END 1 */
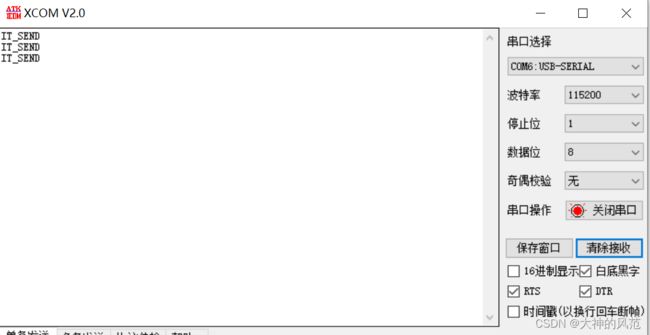
实验效果

串口发送中断主函数
HAL_UART_Receive_IT(&huart1,&Data, sizeof(Data));//开启中断接收数据
uint8_t IT_SEND[]="IT_SEND";
HAL_UART_Transmit_IT(&huart1,IT_SEND, sizeof(IT_SEND)/sizeof(IT_SEND[0]));
u1_printf("\r\n");
只需要在主函数处添加这一部分代码。
效果图
 串口中断接收本人采用的方式是结束位为0x5c串口接收结束,长度不可大于15个字节,实例代码如下
串口中断接收本人采用的方式是结束位为0x5c串口接收结束,长度不可大于15个字节,实例代码如下
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
if(recv_end_flag_1==1)
{
for(int i=0;i<sizeof(rx_buffer1)/sizeof(rx_buffer1[0]);i++)
{
rx_buffer1[i]=0;
}
recv_end_flag_1 = 0; //数据清空
}
rx_buffer1[Cnt]=Data;
Cnt++;
if(rx_buffer1[Cnt-1] == 0x5C)//判断是否为'\'结尾
{
//rx_buffer1[Cnt-1] = 0x0a;
u1_printf("\n接收到的数据为:\n");
HAL_UART_Transmit(&huart1,rx_buffer1,Cnt,10000);//显示在串口助手
Cnt = 0;
recv_end_flag_1 = 1; //数据接收完成
for(int i=0;i<sizeof(rx_buffer1)/sizeof(rx_buffer1[0]);i++)
{
rx_buffer1[i]=0;
}
}
HAL_UART_Receive_IT(&huart1,&Data,1);//继续接收数据
}
}
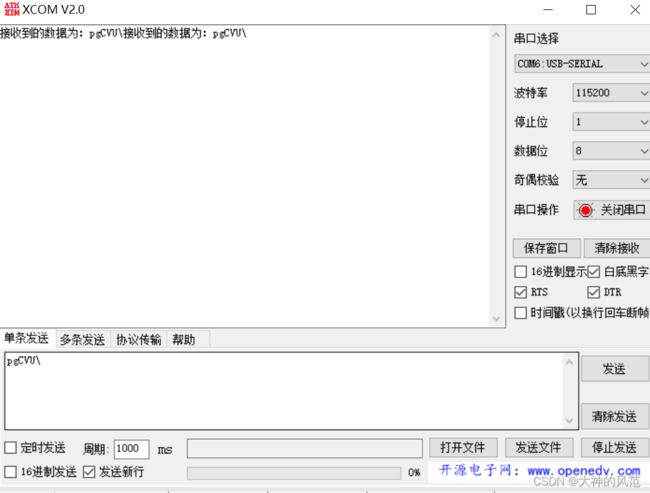 显示效果如图。
显示效果如图。
整体的所有代码以及数据手册链接:
链接:https://pan.baidu.com/s/1xmEUNd82dunSmh_NyI09fg?pwd=6dqr
提取码:6dqr
希望这篇文章对你有所帮助。