决策规划框架 - (解耦:路径规划和速度规划 | 耦合:行为规划和轨迹规划)
1 解耦策略
1.1 概述
核心思想:
(1)路径规划:假定环境是“静态的”,将障碍物投影到参考路径上,并规划路径避开这些障碍物
(2)速度规划:根据路径规划给出的路径,将静态/动态障碍物投射到ST图上,并在ST图上规划一条速度曲线
Path planning

基于当前的静态环境,生成路径边界来描述可通行区域。通常,这是一个凸集,确保优化的质量
可以在Frenet l ( s ) l(s) l(s)和笛卡尔坐标系 x ( s ) , y ( s ) x(s),y(s) x(s),y(s)下进行路径规划
Speed planning

投影:基于障碍物的预测信息,阻碍自车给定的路径的障碍物在图中用红色和橙色标记
s ( t ) s(t) s(t)的高阶导数信息也包含在ST图中,例如都是平行四边形,可以看出障碍物都是匀速运动
自动驾驶汽车轨迹优化的实时运动规划

Baidu Apollo EM Motion Planner

1.2 路径规划
1.2.1 SL 投影

SL Projection:将动态、静态障碍物投影到参考线,
(1)用上一帧规划周期的ST估计自车未来行为和低速动态障碍物是否会交互,通过路径优化器
(2)基于上面的投影过程,假设用于路径规划的“静态”环境
1.2.2 DP路径决策

(1)在自车前面采样多行点。点行之间的间隔取决于速度、道路结构
(2)不同行的点之间用五次多项式平滑地连接
(3)基于上述过程构造Lattice图,可以使用DP在图中找到最优路径
(4)提供一个路径的粗解,这条路径具有可行隧道和障碍物级别的决策
计算每条边的Cost:DP 路径决策
1.2.3 QP路径优化

(1)DP路径是次优的,因为Lattice图不能完全覆盖全局最优解
(2)五次样条QP路径是动态规划路径步骤的细化,构造一个凸空间
QP路径优化Cost函数设计

(1)这一步g(s)指的是DP路径,提供了对障碍物的距离
(2)使用线性化约束近似考虑航向的影响

1.3 速度规划
1.3.1 ST投影

(1)将静态障碍物和动态障碍物轨迹投影到路径规划SL的路径上,构建ST图
(2)速度规划的任务就是在ST图上找到最优曲线
1.3.2 DP速度决策

(1)和路径优化器类似,在ST图上找到最佳速度曲线是一个非凸优化问题
(2)DP结果包括分段线性速度曲线,基于DP结果构造可行凸区域和障碍物速度决策
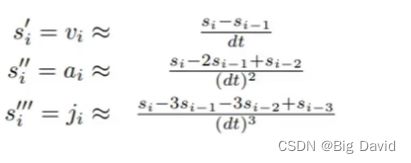
基于离散的ST网格,高阶 导数用有限差分法近似
成本函数设计为:

1.3.3 QP速度优化

(1)分段线性速度曲线不能满足动力学要求,几乎不可能是全局最优解,需要用样条QP步骤优化
(2)与路径优化类似,基于五次样条的二次规划用于生成更精细的轮廓
五次样条速度优化的目标函数设计:

线性约束:

1.4 总结
DP + QP:
(1)使用DP在网格中搜索能得到一个粗解
(2)DP结果用于生成凸集并且引导QP
(3)QP用于搜索在凸区域里面的全局最优解
EM planner的缺陷:
(1)动态规划非常耗时
1 DP需要遍历图中的所有节点去获得最优解
2 与基于 A* 的方法相比,一个好的启发式函数可以快速引导算法找到最优解
(2)EM planner速度规划是次优的
例如如果速度限制依赖于位置,则对应于相同时间戳的速度约束随着优化过程速度曲线不断变化,使得问题非凸
2 耦合策略
(1)行为决策
目标是找到不同的机动行为,并找到一个最优的
(1) 变道决策:左右变道
(2) 障碍物决策:向左绕/向右绕,超车或跟车
(2)轨迹规划
轨迹规划是在相应的时空中生成局部平滑和安全的轨迹
2.1 行为规划
2.1.1 基于规则的变道决策(有限状态机)

基于规则的变道决策

优点:易于实施,强大的可解释性
缺点:可维护性差,可拓展性差
2.1.2 基于轨迹的变道决策


核心思想:
(1)不做出明确的车道决策,而是基于不同的目标车道规划轨迹,并且最终根据轨迹的最高质量做出决策
(2)确保决策和规划结果是一致的,不会突然做决定
(3)从轨迹规划的结果可以得到更详细的信息,使得决策更加合理
2.1.3 障碍物决策

(1)根据给定的目标车道,为静态或者动态障碍物做出决策(1 向左/向右绕 2 超车还是跟车)
(2)决策结果包括语义标签和时空安全走廊,以及粗糙的轨迹(后期需要平滑)
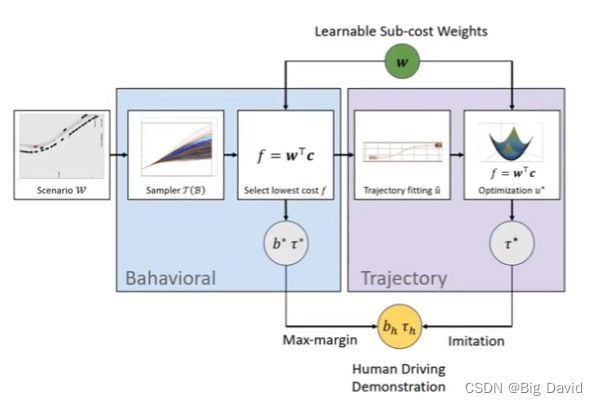
(1)行为模块将最优行为决策 b ∗ b^* b∗和粗解轨迹 τ ∗ \tau^* τ∗传递给轨迹规划阶段
(2)对采样轨迹打分,并选择成本最低的轨迹作为行为规划的结果
(3)行为和轨迹模块使用相同的学习成本权重集最小化相同的成本函数

轨迹采样器(两段四次多项式)
纵向轨迹 s ( t ) {s(t)} s(t)
横向轨迹 d ( s ) d(s) d(s)
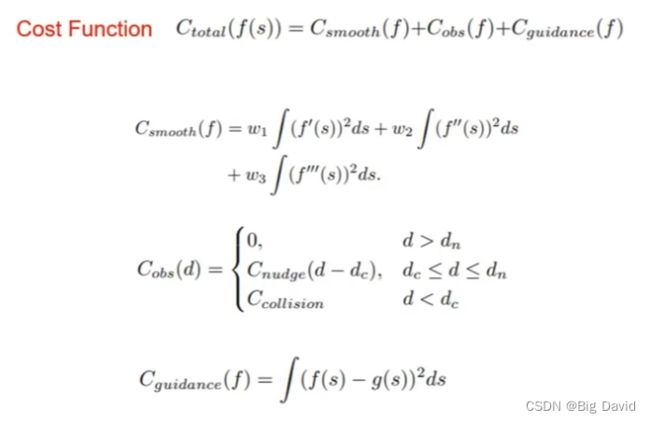
统一成本函数
障碍物、行驶路径和车道边界、航行速度、让路、路线、Cost to go、速度限制,行驶距离,动力学要求

行为决策包括障碍侧分配和车道信息
b ∗ b^* b∗编码为左右车道边界、行驶路径和障碍物分配,确定障碍物在时间t时刻停留在汽车的前后左右
基于搜索/采样的障碍物决策
可以通过基于搜索(A*,DP,…)的规划算法和基于采样的方法规划粗解。

2.2 轨迹规划
基于时空联合的轨迹优化方法

输入:
(1)参考路径(目标车道)
(2)粗糙的轨迹
(3)时空安全走廊(障碍物决策)
输出:
轨迹:{ t → ( x , y , θ , v ) t\to (x,y,\theta,v) t→(x,y,θ,v)}
目标:
(1)安全:对于静态和动态障碍物无碰撞
(2)舒适:输出轨迹足够平滑
(3)动态可行:能够被控制器执行
目标函数设计:

约束设计:

把硬约束转换为软约束

对于约束函数: g ( x , u ) < 0 g(x,u)<0 g(x,u)<0,使用惩罚函数来惩罚违反约束的部分
对于不同类型的约束,选择具有不同惩罚程度的惩罚函数
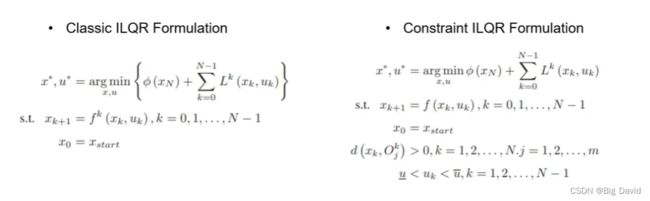
简要介绍ILQR算法
目标函数和离散动力学

最优控制的解

定义cost-to-go函数

定义Q函数


使用行为决策的输出

(1)约束从行为规划模块的输出生成的时空走廊轨迹
(2)凸可行区域使优化更加稳定