STM32系列(HAL库)——F103C8T6通过SPI方式读写W25Q64—(Flash存储模块)
1.软件准备
(1)编程平台:Keil5
(2)CubeMX
(3)XCOM(串口调试助手)
2.硬件准备
(1)W25Q64模块

(2)F1的板子,本例使用经典F103C8T6

(3)ST-link 下载器

(4)USB-TTL模块

(5)杜邦线若干

3.模块资料
(1)模块简介:
- W25Q64(64M-bit),W25Q16(16M-bit)和W25Q32(32M-bit)是为系统提供一个最小的空间、引脚和功耗的存储器解决方案的串行Flash存储器。25Q系列比普通的串行Flash存储器更灵活,性能更优越。基于双倍/四倍的SPI,它们能够可以立即完成提供数据给RAM,包括存储声音、文本和数据。芯片支持的工作电压2.7V到3.6V,正常工作时电流小于5mA,掉电时低于1uA。所有芯片提供标准的封装。
- W25Q64/16/32由每页256字节组成。每页的256字节用一次页编程指令即可完成。每次可以擦除16页(1个扇区)、128页(32KB块)、256页(64KB块)和全片擦除。
- W25Q64的内存空间结构:一页256字节,4K(4096字节)为一个扇区,16个扇区为1块,容量为8M字节,共有128个块,2048个扇区。
- W25Q64/16/32支持标准串行外围接口(SPI),和高速的双倍/四倍输出,双倍/四倍用的引脚:串行时钟、片选端、串行数据I/00(DI)、I/01(DO)、I/O2(WP)和I/03(HOLD)。SPI最高支持8OMHz,当用快读双倍/四倍指令时,相当于双倍输出时最高速率160MHz,四倍输出时最高速率32OMHz。这个传输速率比得上8位和16位的并行Flash存储器。
(2)模块参数:
- 采用串行Nor flash外扩存储芯片
- 支持SPI接口
- 工作电压:2.7~3.6V
- 容量: 32Mbit(W25Q32)、64Mbit(W25Q64)、128Mbit(W25Q128)
(3)参考原理图:

更多资料可参考:W25Q64数据手册
4.CubeMX配置
(1)芯片选择

(2)配置RCC、SYS、时钟树

配置RCC

配置SYS

配置时钟树
(3)配置串口1

(4)配置SPI1

(5)配置GPIO

(6)设置路径、生成代码工程
5、Keil5代码
(1)勾选Use MicroLIB

(2)创建W25Qxx.c和W25Qxx.h文件
(3)添加上述的W25Qxx.c文件进工程
——————上述两步参考之前系列教学步骤,在此不再赘述(点击跳转)
(4)W25Qxx.c和W25Qxx.h代码
W25Qxx.h
#ifndef __W25Qxx_H
#define __W25Qxx_H
/* Includes ------------------------------------------------------------------*/
#include "stm32f1xx.h"
#include "spi.h"
#define W25Q128FV_FLASH_SIZE 0x1000000 /* 128 MBits => 16MBytes */
#define W25Q128FV_SECTOR_SIZE 0x10000 /* 256 sectors of 64KBytes */
#define W25Q128FV_SUBSECTOR_SIZE 0x1000 /* 4096 subsectors of 4kBytes */
#define W25Q128FV_PAGE_SIZE 0x100 /* 65536 pages of 256 bytes */
#define W25Q128FV_DUMMY_CYCLES_READ 4
#define W25Q128FV_DUMMY_CYCLES_READ_QUAD 10
#define W25Q128FV_BULK_ERASE_MAX_TIME 250000
#define W25Q128FV_SECTOR_ERASE_MAX_TIME 3000
#define W25Q128FV_SUBSECTOR_ERASE_MAX_TIME 800
#define W25Qx_TIMEOUT_VALUE 1000
/* Reset Operations */
#define RESET_ENABLE_CMD 0x66
#define RESET_MEMORY_CMD 0x99
#define ENTER_QPI_MODE_CMD 0x38
#define EXIT_QPI_MODE_CMD 0xFF
/* Identification Operations */
#define READ_ID_CMD 0x90
#define DUAL_READ_ID_CMD 0x92
#define QUAD_READ_ID_CMD 0x94
#define READ_JEDEC_ID_CMD 0x9F
/* Read Operations */
#define READ_CMD 0x03
#define FAST_READ_CMD 0x0B
#define DUAL_OUT_FAST_READ_CMD 0x3B
#define DUAL_INOUT_FAST_READ_CMD 0xBB
#define QUAD_OUT_FAST_READ_CMD 0x6B
#define QUAD_INOUT_FAST_READ_CMD 0xEB
/* Write Operations */
#define WRITE_ENABLE_CMD 0x06
#define WRITE_DISABLE_CMD 0x04
/* Register Operations */
#define READ_STATUS_REG1_CMD 0x05
#define READ_STATUS_REG2_CMD 0x35
#define READ_STATUS_REG3_CMD 0x15
#define WRITE_STATUS_REG1_CMD 0x01
#define WRITE_STATUS_REG2_CMD 0x31
#define WRITE_STATUS_REG3_CMD 0x11
/* Program Operations */
#define PAGE_PROG_CMD 0x02
#define QUAD_INPUT_PAGE_PROG_CMD 0x32
/* Erase Operations */
#define SECTOR_ERASE_CMD 0x20
#define CHIP_ERASE_CMD 0xC7
#define PROG_ERASE_RESUME_CMD 0x7A
#define PROG_ERASE_SUSPEND_CMD 0x75
/* Flag Status Register */
#define W25Q128FV_FSR_BUSY ((uint8_t)0x01) /*!< busy */
#define W25Q128FV_FSR_WREN ((uint8_t)0x02) /*!< write enable */
#define W25Q128FV_FSR_QE ((uint8_t)0x02) /*!< quad enable */
#define W25Qx_Enable() HAL_GPIO_WritePin(W25QXX_CS_GPIO_Port, W25QXX_CS_Pin, GPIO_PIN_RESET)
#define W25Qx_Disable() HAL_GPIO_WritePin(W25QXX_CS_GPIO_Port, W25QXX_CS_Pin, GPIO_PIN_SET)
#define W25Qx_OK ((uint8_t)0x00)
#define W25Qx_ERROR ((uint8_t)0x01)
#define W25Qx_BUSY ((uint8_t)0x02)
#define W25Qx_TIMEOUT ((uint8_t)0x03)
uint8_t BSP_W25Qx_Init(void);
static void BSP_W25Qx_Reset(void);
static uint8_t BSP_W25Qx_GetStatus(void);
uint8_t BSP_W25Qx_WriteEnable(void);
void BSP_W25Qx_Read_ID(uint8_t *ID);
uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size);
uint8_t BSP_W25Qx_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size);
uint8_t BSP_W25Qx_Erase_Block(uint32_t Address);
uint8_t BSP_W25Qx_Erase_Chip(void);
#endif
W25Qxx.c
#include "W25Qxx.h"
/**********************************************************************************
* 函数功能: 模块初始化
*/
uint8_t BSP_W25Qx_Init(void)
{
BSP_W25Qx_Reset();
return BSP_W25Qx_GetStatus();
}
static void BSP_W25Qx_Reset(void)
{
uint8_t cmd[2] = {RESET_ENABLE_CMD,RESET_MEMORY_CMD};
W25Qx_Enable();
/* Send the reset command */
HAL_SPI_Transmit(&hspi1, cmd, 2, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
}
/**********************************************************************************
* 函数功能: 获取设备状态
*/
static uint8_t BSP_W25Qx_GetStatus(void)
{
uint8_t cmd[] = {READ_STATUS_REG1_CMD};
uint8_t status;
W25Qx_Enable();
/* Send the read status command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,&status, 1, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
/* Check the value of the register */
if((status & W25Q128FV_FSR_BUSY) != 0)
{
return W25Qx_BUSY;
}
else
{
return W25Qx_OK;
}
}
/**********************************************************************************
* 函数功能: 写使能
*/
uint8_t BSP_W25Qx_WriteEnable(void)
{
uint8_t cmd[] = {WRITE_ENABLE_CMD};
uint32_t tickstart = HAL_GetTick();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY);
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Qx_TIMEOUT_VALUE)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}
/**********************************************************************************
* 函数功能: 获取设备ID
*/
void BSP_W25Qx_Read_ID(uint8_t *ID)
{
uint8_t cmd[4] = {READ_ID_CMD,0x00,0x00,0x00};
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,ID, 2, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
}
/**********************************************************************************
* 函数功能: 读数据
* 输入参数: 缓存数组指针、读地址、字节数
*/
uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
{
uint8_t cmd[4];
/* Configure the command */
cmd[0] = READ_CMD;
cmd[1] = (uint8_t)(ReadAddr >> 16);
cmd[2] = (uint8_t)(ReadAddr >> 8);
cmd[3] = (uint8_t)(ReadAddr);
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
if (HAL_SPI_Receive(&hspi1, pData,Size,W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
return W25Qx_OK;
}
/**********************************************************************************
* 函数功能: 写数据
* 输入参数: 缓存数组指针、写地址、字节数
*/
uint8_t BSP_W25Qx_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size)
{
uint8_t cmd[4];
uint32_t end_addr, current_size, current_addr;
uint32_t tickstart = HAL_GetTick();
/* Calculation of the size between the write address and the end of the page */
current_addr = 0;
while (current_addr <= WriteAddr)
{
current_addr += W25Q128FV_PAGE_SIZE;
}
current_size = current_addr - WriteAddr;
/* Check if the size of the data is less than the remaining place in the page */
if (current_size > Size)
{
current_size = Size;
}
/* Initialize the adress variables */
current_addr = WriteAddr;
end_addr = WriteAddr + Size;
/* Perform the write page by page */
do
{
/* Configure the command */
cmd[0] = PAGE_PROG_CMD;
cmd[1] = (uint8_t)(current_addr >> 16);
cmd[2] = (uint8_t)(current_addr >> 8);
cmd[3] = (uint8_t)(current_addr);
/* Enable write operations */
BSP_W25Qx_WriteEnable();
W25Qx_Enable();
/* Send the command */
if (HAL_SPI_Transmit(&hspi1,cmd, 4, W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
/* Transmission of the data */
if (HAL_SPI_Transmit(&hspi1, pData,current_size, W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY);
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Qx_TIMEOUT_VALUE)
{
return W25Qx_TIMEOUT;
}
}
/* Update the address and size variables for next page programming */
current_addr += current_size;
pData += current_size;
current_size = ((current_addr + W25Q128FV_PAGE_SIZE) > end_addr) ? (end_addr - current_addr) : W25Q128FV_PAGE_SIZE;
} while (current_addr < end_addr);
return W25Qx_OK;
}
/**********************************************************************************
* 函数功能: 扇区擦除
* 输入参数: 地址
*/
uint8_t BSP_W25Qx_Erase_Block(uint32_t Address)
{
uint8_t cmd[4];
uint32_t tickstart = HAL_GetTick();
cmd[0] = SECTOR_ERASE_CMD;
cmd[1] = (uint8_t)(Address >> 16);
cmd[2] = (uint8_t)(Address >> 8);
cmd[3] = (uint8_t)(Address);
/* Enable write operations */
BSP_W25Qx_WriteEnable();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() == W25Qx_BUSY);
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Q128FV_SECTOR_ERASE_MAX_TIME)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}
/**********************************************************************************
* 函数功能: 芯片擦除
*/
uint8_t BSP_W25Qx_Erase_Chip(void)
{
uint8_t cmd[4];
uint32_t tickstart = HAL_GetTick();
cmd[0] = CHIP_ERASE_CMD;
/* Enable write operations */
BSP_W25Qx_WriteEnable();
/*Select the FLASH: Chip Select low */
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 1, W25Qx_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25Qx_Disable();
/* Wait the end of Flash writing */
while(BSP_W25Qx_GetStatus() != W25Qx_BUSY);
{
/* Check for the Timeout */
if((HAL_GetTick() - tickstart) > W25Q128FV_BULK_ERASE_MAX_TIME)
{
return W25Qx_TIMEOUT;
}
}
return W25Qx_OK;
}
(5) usart.c函数添加
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 */
/* USER CODE BEGIN 1 */
/*********************************************************
*
*重定义 fputc 函数
*
*********************************************************/
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );
return ch;
}
/* USER CODE END 1 */(6)main函数
#include
#include
#include "W25Qxx.h"
uint8_t wData[0x100]; //写缓存数组
uint8_t rData[0x100]; //读缓存数组
uint8_t ID[4]; //设备ID缓存数组
uint32_t i;
void SystemClock_Config(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_SPI1_Init();
MX_USART1_UART_Init();
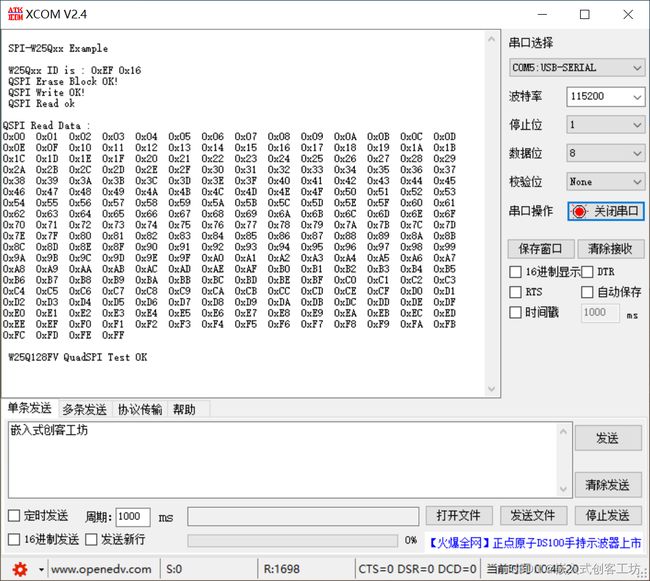
printf("\r\n SPI-W25Qxx Example \r\n\r\n");
/*-Step1- 验证设备ID ************************************************Step1*/
BSP_W25Qx_Init();
BSP_W25Qx_Read_ID(ID);
//第一位厂商ID固定0xEF,第二位设备ID根据容量不同,具体为:
//W25Q16为0x14、32为0x15、40为0x12、64为0x16、80为0x13、128为0x17
if((ID[0] != 0xEF) | (ID[1] != 0x16))
{
printf("something wrong in Step1 \r\n");
}
else
{
printf(" W25Qxx ID is : ");
for(i=0;i<2;i++)
{
printf("0x%02X ",ID[i]);
}
printf("\r\n");
}
/*-Step2- 擦除块 ************************************************Step2*/
if(BSP_W25Qx_Erase_Block(0) == W25Qx_OK)
printf(" QSPI Erase Block OK!\r\n");
else
printf("something wrong in Step2\r\n");
/*-Step3- 写数据 ************************************************Step3*/
for(i =0;i<0x100;i ++)
{
wData[i] = i;
rData[i] = 0;
}
if(BSP_W25Qx_Write(wData,0x00,0x100)== W25Qx_OK)
printf(" QSPI Write OK!\r\n");
else
printf("something wrong in Step3\r\n");
/*-Step4- 读数据 ************************************************Step4*/
if(BSP_W25Qx_Read(rData,0x00,0x100)== W25Qx_OK)
printf(" QSPI Read ok\r\n\r\n");
else
printf("something wrong in Step4\r\n");
printf("QSPI Read Data : \r\n");
for(i =0;i<0x100;i++)
printf("0x%02X ",rData[i]);
printf("\r\n\r\n");
/*-Step5- 数据对比 ************************************************Step5*/
if(memcmp(wData,rData,0x100) == 0 )
printf(" W25Q64FV QuadSPI Test OK\r\n");
else
printf(" W25Q64FV QuadSPI Test False\r\n");
while (1)
{
}
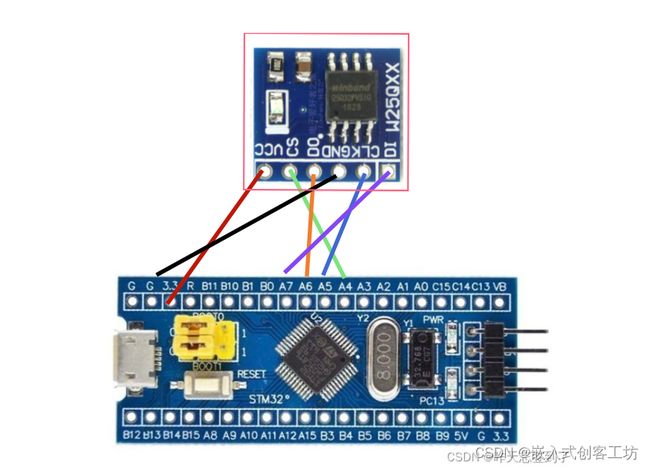
} 6.接线图及效果