python3使用树莓派GPIO控制步进电机-新手详细教程
步进电机可以正向转动‘一步’,也可以反向转动‘一步’,当然通过程序的循环控制,达到连续性的转动,本文中控制程序使用python3编写;
需要配件
28BYJ48 步进电机 1个(五线四相马达)
ULN2003A驱动板 1个
杜邦线母转母 6根(一排一般40根左右,只需要6根即可)
树莓派4B,或其他类型树莓派,本人使用的是树莓派4b;
建议:步进电机和驱动板套件一起购买8元;
杜邦线母转母2.5元40根,建议公转公,母转母,公转母,都购买一下,省得以后折腾别的东西的时候在买,还需等;
ULN2003A驱动板展示

28BYJ48 步进电机-展示

杜邦线-展示

电路连接方式:
1、步进电机连接驱动板

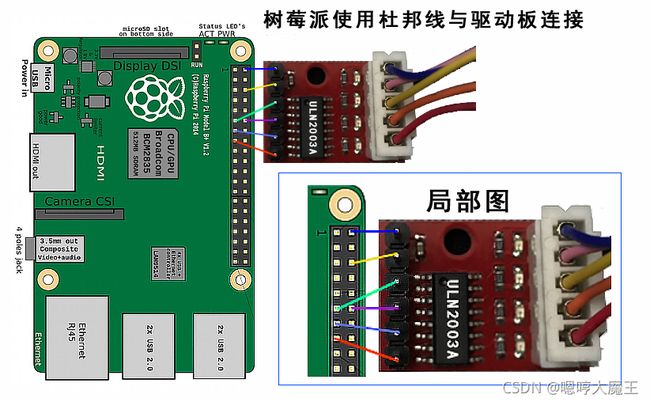
2、树莓派连接驱动板(使用杜邦线)
python3代码:
import RPi.GPIO as GPIO
import time
IN1 = 11 # pin11
IN2 = 12
IN3 = 13
IN4 = 15
def setStep(w1, w2, w3, w4):
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def stop():
setStep(0, 0, 0, 0)
def forward(delay, steps):
for i in range(0, steps):
setStep(1, 0, 0, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 0, 0, 1)
time.sleep(delay)
def backward(delay, steps):
for i in range(0, steps):
setStep(0, 0, 0, 1)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(1, 0, 0, 0)
time.sleep(delay)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(IN1, GPIO.OUT) # Set pin's mode is output
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
def loop():
while True:
print ("backward...")
backward(0.003, 512) # 512 steps --- 360 angle
print ("stop...")
stop() # stop
time.sleep(3) # sleep 3s
print ("forward...")
forward(0.005, 512)
print ("stop...")
stop()
time.sleep(3)
def destroy():
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child function destroy() will be executed.
destroy()
执行效果:
低清晰度的GIF图片凑合看把..
有什么问题可以再留言或者私信询问我,看到会回复,建议新手按照本文的教程一步一步的操作;