STM32-—USART串口外设
一、通信协议

通信的目的:将一个设备的数据传送到另一个设备,扩展硬件系统。
通信协议:制定通信的规则,通信双方按照协议规则进行数据收发。
全双工通信:
在全双工通信中,数据可以同时在两个方向上传输,即设备可以同时发送和接收数据,而且这两个方向是独立的。这种模式类似于电话通信,其中两个人可以同时说话而互相不影响。全双工通信允许实时的双向通信,但需要独立的通信通道来支持两个方向的数据传输。
半双工通信:
在半双工通信中,数据传输只能在一个方向上进行,即设备可以交替地发送和接收数据,但不能同时进行。这类似于对讲机通信,其中一方发送完消息后必须等待对方的回复才能发送下一个消息。
异步时钟:
在异步通信中,发送和接收设备的时钟不是直接同步的。相反,每个数据包都包含了自己的时钟信息,接收设备根据数据包中的时钟信息来解析数据。因为设备的时钟不同步,所以数据的传输时间间隔可能不固定,需要约定传输速率。
同步时钟:
在同步通信中,发送和接收设备使用相同的时钟信号来协调数据的传输。这意味着发送和接收设备之间的时钟是相互同步的,数据的传输时间间隔是固定的
单端信号:
单端信号(Single-ended signal)是一种通信信号传输方式,其中信号是相对于共享的地线(地点或接地线)的电压变化。在单端信号中,信号的大小是通过与地线的电压差来表示的,而地线在信号传输中扮演了参考点的角色
差分信号:
差分信号(Differential Signal)是一种通信信号传输方式,它使用两个相互关联的信号线来传输数据。这两个信号线分别传输正相和负相的信号,信号的有效大小是两个信号线之间的电压差
二、USART串口外设
USART是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里。
STM32中的USRT串口资源有:
可配置数据位长度(8/9)、停止位长度(0.5/1/1.5/2) 可选校验位(无校验/奇校验/偶校验)
USART1(APB1总线)、 USART2、 USART3(USART2|3挂载在APB2总线)。
2.1、USART程序框图&工作流程

以上是USART的总体程序框图,但实际上它的主要工作部分是红色部分的硬件电路。
2.1.1、工作流程
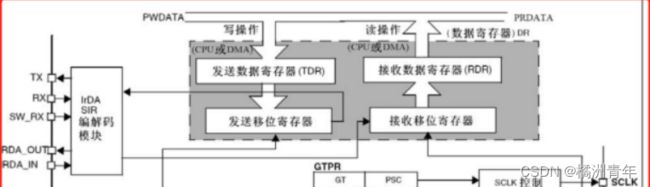
TDR(发送数据寄存器):存储需要发送的数据
RDR(接收数据寄存器):存储所接收的数据
在程序上TDR与RDR占用同一个内存地址,但硬件是分为2个。
例如在某时刻给TDR寄存器写入0x55,在寄存器中会存储二进制01010101,此时硬件会检测到你写入数据,并检查发送移位寄存器是否有数据正在移位,若没有,则01010101会立即移动到发送移位寄存器,准备发送。而当01010101由寄存器移动到移位寄存器时,会置一个标志位TXE(TX Empty)——发射器空。若置1,则可以代TDR写入下一个数据,并且在发生控制器的驱动下向右移位,一位一位的把数据输出到TX引脚。若置0,则等待直到置1。RDR工作模式与TDR类似,但RDR由移位寄存器移动到寄存器时,其标志位为RXNE,其为1时,数据可以由移位寄存器发送至数据寄存器。
2.2.2、发送控制
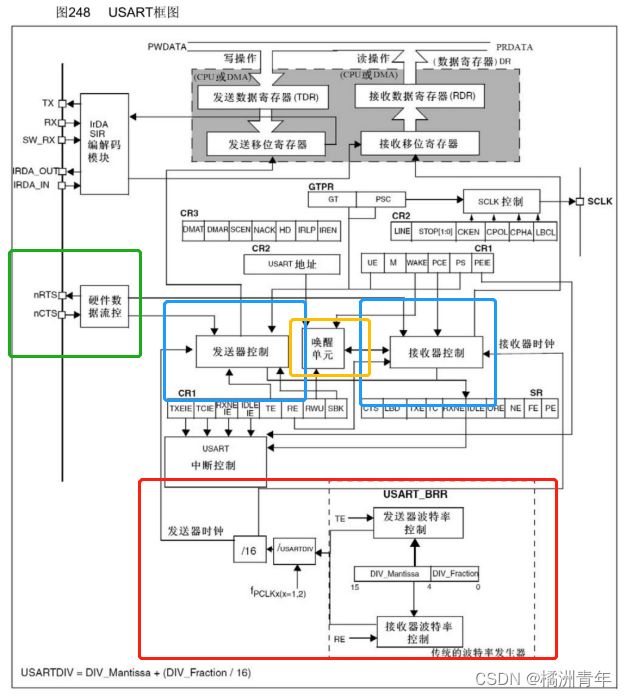
上图蓝色框选的即为发送控制与接收控制。用于控制数据的接收与发生。
而绿色框选的部分为硬件流控制。用于避免发送数据过快,而接收数据不及时造成数据覆盖问题。其中nRTS为请求发送,是输出脚,用于判断能否接收数据。nCTS为清除发送,是输入脚,用于接收其他nRTS信号。(nRTS与nCTS中的n表示低电平有效) 。但该部分可能使用不多。
黄色框选部分为唤醒单元,是用于挂载多设备。需要时可自行了解。
红色框选部分为波特率发生器部分。可以将其理解为分频器。

时钟输入为![]() ,其中的USART1挂载在APB2,其
,其中的USART1挂载在APB2,其![]() 2的时钟一般为72M,而其余USART挂载在APB1,其
2的时钟一般为72M,而其余USART挂载在APB1,其![]() 1时钟为36M。
1时钟为36M。
![]() 时钟输入后,需要进行分频,除以一个USARTDIV的分频系数,该系数为上图红色框选部分,Mantissa为整数部分,Fraction为小数部分。因为有的些波特率,用72M的频率无法除尽,会有误差,因此分频系数支持小数部分。
时钟输入后,需要进行分频,除以一个USARTDIV的分频系数,该系数为上图红色框选部分,Mantissa为整数部分,Fraction为小数部分。因为有的些波特率,用72M的频率无法除尽,会有误差,因此分频系数支持小数部分。
![]() 时钟除以一个USARTDIV的分频系数后,仍需要除以一个分频系数16,以得到发射器时钟以及接收器时钟,通向控制部分。
时钟除以一个USARTDIV的分频系数后,仍需要除以一个分频系数16,以得到发射器时钟以及接收器时钟,通向控制部分。
若TX (TX ENABLE)为1,发送器使能,发送部分波特率有效;若RE(RE ENAABLE)为1,接收器使能,接收器部分波特率有效。
波特率计算公式:波特率=![]() 。
。
2.2.3、USART引脚

 以上为部分USART的引脚定义表,需要用到USART进行通信是,所用引脚需要参照以上表格。
以上为部分USART的引脚定义表,需要用到USART进行通信是,所用引脚需要参照以上表格。
2.3、USART的配置流程
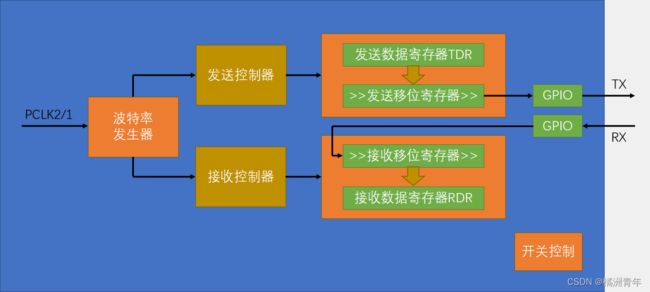
时钟来源为PCLK2或PCLK1。
三、USART相关函数介绍
3.1、外设常见函数介绍
3.1.1、USART_DeInit()
//将USARTx外设寄存器初始化为其默认重置值
USART_DeInit(USART_TypeDef* USARTx);
3.1.2、USART_Init()
//根据指定的参数初始化USARTx外设
USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
3.1.3、USART_StructInit()
//用默认值填充每个USART_InitStruct成员
USART_StructInit(USART_InitTypeDef* USART_InitStruct);
3.1.4、USART_Cmd()
//启用或禁用指定的USART外设
USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
3.1.5、USART_ITConfig()
//启用或禁用指定的USART中断
USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
3.1.6、USART_DMACmd()
//启用或禁用指定的USART DMA请求,使用DMA转运数据,需要用到此函数
USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
3.1.6、USART_GetFlagStatus()
//检查是否设置了指定的USART标志
USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)
3.2、USART相关函数
3.2.1、USART_ClockInit()&USART_ClockStructInit()
//配置同步时钟输出(时钟是否输出,时钟输出参数等)
USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
3.2.2、USART_SendData()&USART_ReceiveData()
//通过USARTx外设传输单个数据&返回USARTx外设最近接收到的数据
USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
USART_ReceiveData(USART_TypeDef* USARTx)
四、串口数据发送&串口数据发送+接收代码
4.1、串口数据发送
4.1.1、时钟配置&GPIO配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode使用的是复用推挽输出模式(GPIO_Mode_AF_PP)
4.1.2、USART结构体配置
1、USART_InitTypeDef USART_InitStruture;
2、USART_InitStruture.USART_BaudRate=9600;//波特率
3、USART_InitStruture.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //指定硬
件流控模式是否开启或关闭
4、USART_InitStruture.USART_Mode=USART_Mode_Tx; //指定是否启用或禁用接收或发送模式
5、USART_InitStruture.USART_Parity= USART_Parity_None;//奇偶校验模式
6、USART_InitStruture.USART_StopBits=USART_StopBits_1; //指定传输的停止位数
7、USART_InitStruture.USART_WordLength=USART_WordLength_8b;//指定帧中发送或接收的数据位数
8、USART_Init(USART1,&USART_InitStruture);
9、USART_Cmd(USART1,ENABLE);(2)波特率直接填写需要的波特率的值,会自动帮你算好。
(3)硬件流控制:本例程不需要用到,故选择None
(4)USART_Mode:本例程中选择开启发送模式,若发送&接收都需要则可以选择USART_Mode_Rx|USART_Mode_Tx
(5)奇偶校验模式:启用奇偶校验时,在传输数据的MSB位置(第9位时),字长设置为9位数据位;第8位时字长设置为8位数据位)。其中USART_Parity_No—无校验;USART_Parity_Even—偶校验;USART_Parity_Odd—奇校验。
(6)传输停止位:USART_StopBits_1、USART_StopBits_1_5、USART_StopBits_2、USART_StopBits_2_5分别对应1位、1.5位、2位、2.5。本例程使用的是1位停止位。

(7)发送或接收数据位:本例程由于不使用校验,因此选择字长为8位
以上即可配置完成GPIO口、USART以及开启时钟。接来下封装一个发送数据的函数
4.1.2、数据发送
void USART_SendByte(uint8_t Data)
{
USART_SendData(USART1,Data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
//检查是否设置了指定的USART标志 TXE发射数据寄存器空标志位
}
其中USART_GetFlagStatus()用于判断TDR数据是否完全转移至发射数据寄存器,是为了防止TDR数据未转移完成而再次写入数据至TDR,从而产生数据覆盖。使用while()函数是为了等待TDR数据转移完成,当TXE为1时,即表明数据转运完成,可写入新数据至TDR。以下是手册对于TXE的说明。置位后由硬件自动清0。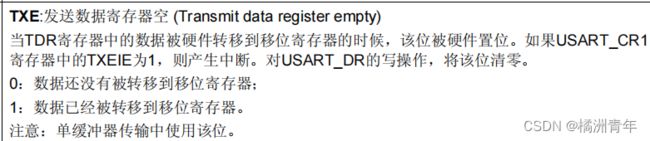
4.1.3、发送数组数据
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i4.1.4、发送字符串数据
void Serial_SendString(char *String)
{
uint8_t i;
for(i=0;String[i]!='\0';i++)
{
USART_SendByte(String[i]);
}
}
//Serial_SendString("HelloWould\r\n");其中 \r\n 起到换行作用
4.1.5、发送连续型数字数据
//x^y函数
uint32_t Serial_Pow(uint32_t x,uint32_t y)
{
uint32_t Ruselt;
while(y--)
{
Ruselt*=x;
}
return Ruselt;
}
uint32_t Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;Length!=0;i++)
{
USART_SendByte(Number/Serial_Pow(10,Length-i-1)%10+0x30);
}
}Number/Serial_Pow(10,Length-i-1)%10+0x30 注解
1、Number/Serial_Pow(10,Length-i-1) :1234/1000=1;1234/100=12;该含义是对 Number 取整数。
2、Number/Serial_Pow(10,Length-i-1)%10:对取整后的数字取余,从而取得对应的单个数字
3、Number/Serial_Pow(10,Length-i-1)%10+0x30 :最终以字符形式展示数字,因此需要加上对应的ASCII码方可由二进制转换为对应字符。

补充:
使用printf()输出内容值串口
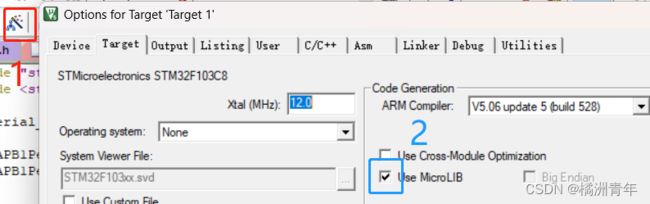
前置操作
首先点击keil界面中的魔法棒,然后勾选Use MicroLIB选项。
然后分别在自己的USART封装库中添加头文件

因为我的main文件中包含了Serial。h文件,因此相当于我的main文件也包含了 stdio.h文件。
方法一:
int fputc(int ch, FILE *f)
{
USART_SendByte(ch);
return ch;
}
//使用
printf("Num=%d\r\n",6666);fputc()是printf的底层代码, 其作用是使 printf 输出内容至 串口。
由于printf只能定向应用于一个串口,当其应用至串口1时,其余串口将无法使用,未解决其他串口也需要使用,可以使用sprintf()函数解决该问题。
方法二:在
在前置操作下,sprintf()的作用是把格式化字符串内容输入到一个数组当中。例如下列代码,sprintf发发即是把内容 "Num=%d\r\n",6666 输入到数组 String。
char String[100];
sprintf(String,"Num=%d\r\n",6666);//参数1:打印地址;参数2:打印内容方法三:
该方法还需要在Serila.c 文件下添加头文件 stdaarg.h 文件
然后在Serila.c 文件下添加以下代码。
void Serial_printf(char *format,...)//参数1:接收格式化字符串,...接收可变参数列表
{
char String[100];//定义输出字符串
va_list arg;;//定义一个参数列表变量 其中va_list是类型名,arg是变量名
va_start(arg,format);// 从format位置开始接收参数表,放在arg
vsprintf(String,format,arg);//参数1:打印位置;参数2;格式化字符串为format;参数3:参数表arg。
va_end(arg);//释放参数表
Serial_SendString(String);
}
//应用
Serial_printf("Num=%d\r\n",6666);//应用代码应放置于main.c文件,置于此处仅为介绍用法。
4.2、全部代码
4.2.1、Serial.c文件代码
#include "stm32f10x.h" // Device header
#include
#include
void Serial_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStruture;
USART_InitStruture.USART_BaudRate=9600;//波特率
USART_InitStruture.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //指定硬件流控模式是否开启或关闭
USART_InitStruture.USART_Mode=USART_Mode_Tx; //指定是否启用或禁用接收或发送模式
USART_InitStruture.USART_Parity= USART_Parity_No;//奇偶校验模式
USART_InitStruture.USART_StopBits=USART_StopBits_1; //指定传输的停止位数
USART_InitStruture.USART_WordLength=USART_WordLength_8b;//指定帧中发送或接收的数据位数
USART_Init(USART1,&USART_InitStruture);
USART_Cmd(USART1,ENABLE);
}
//发送单数据
void USART_SendByte(uint8_t Data)
{
USART_SendData(USART1,Data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);//检查是否设置了指定的USART标志 TXE发射数据寄存器空标志位
}
//发送数组数据
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i 4.2.2、Serial.h文件代码
#ifndef __SERIAL_H
#define __SERIAL_H
#include
void USART_SendByte(uint8_t Data);
void Serial_Init(void);
void Serial_SendArray(uint8_t *Array,uint16_t Length);
void Serial_SendString(uint8_t *String);
uint32_t Serial_SendNumber(uint32_t Number,uint8_t Length);
int fputc(int ch, FILE *f);
void Serial_printf(char *format,...);
#endif
4.2.3、main文件代码
无
五、数据接收
5.1、查询方式
在4.2.1、Serial.c文件代码基础上,插入以下代码,设置接收GPIO口。
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); 
另外需要配置USART串口中的模式,开启接收模式。

其余代码与4.2.1、Serial.c文件中并无区别。
以下是USART的接收使用。
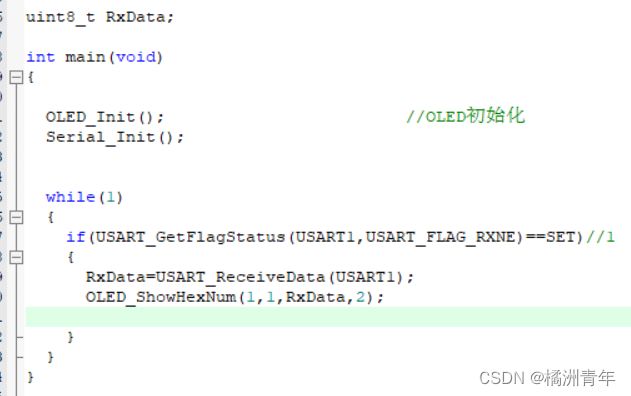
5.2、中断方式
//接收中断
void USART_IRQHandler(void)
{
if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET)
{
Serial_RxData=USART_ReceiveData(USART1);
Serial_RxFlag=1;//
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
//标志位Serial_RxFlag清零
uint8_t Serial_GetRxFlag(void)
{
if(Serial_RxFlag==1)
{
Serial_RxFlag=0;
return 1;
}
return 0;
}
//中断接收封装
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}以下是使用
