【贪心算法】Dijkstra 算法及其衍生
目录
- Dijkstra 算法
- Dijkstra 算法正确性
-
- 证明
- Dijkstra 算法的复杂度
-
- 优化
- Dijkstra 算法的衍生
- SSSP的应用
Dijkstra 算法
1959 年,Edsger Dijkstra 提出一个非常简单的贪心算法来求解单源最短路径问题(Single-Source Shortest Path,SSSP)。
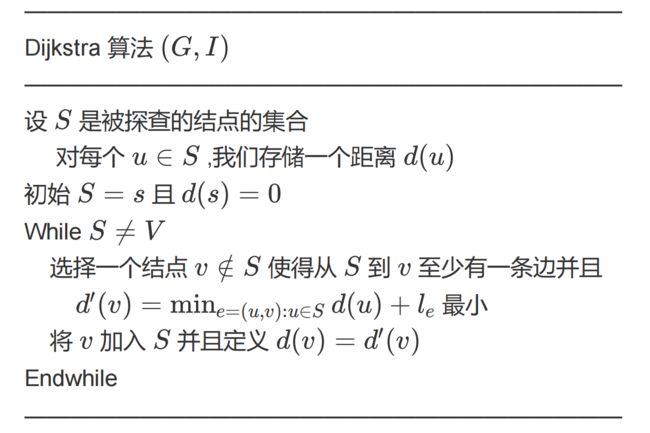
我们开始来描述这个算法,它确定从源点s 到图的每个其他结点的最短路径的长度,同时也容易确定这些路径。算法维护结点的集合 S S S ,对于这些结点我们已经确定了从 s 出发的最短距离 d(u)。
-
这是图“已被探查”的部分初始: S = { s } S=\{s\} S={s} ,且 d ( s ) = 0 d(s)=0 d(s)=0 。
-
现在对每个结点 v ∈ V − S v\in V-S v∈V−S 我们确定一条最短路径,它可以沿一条穿过已被探查部分 S 的路径旅行到某个 u ∈ S u\in S u∈S ,然后再沿着一条边 ( u , v ) (u,v) (u,v) 而把这条路径构造出来,即我们考虑量 d ′ ( v ) = min e = ( u , v ) : u ∈ S d ( u ) + l e d'(v)=\min_{e=(u,v):u\in S}d(u)+l_e d′(v)=mine=(u,v):u∈Sd(u)+le 。
-
我们选择结点 v ∈ V − S v\in V-S v∈V−S 使得这个量最小,将 v v v 加到 S S S 中,并且定义 d ( v ) d(v) d(v) 是 d ′ ( v ) d'(v) d′(v)的值。
生成与 Dijkstra 算法找到的距离相对应的 s➡u 路径 P u P_u Pu 是简单的:
- 当每个结点 v v v 被加到集合 S S S 时,只需要记录一条达到值 min e = ( u , v ) : u ∈ S d ( u ) + l e \min_{e=(u,v):u\in S}d(u)+l_e mine=(u,v):u∈Sd(u)+le 的边 ( u , v ) (u,v) (u,v)
路径 P v P_v Pv 隐含地由这些边描绘出来:- 为构造 P_v,我们只不过从 v v v 开始,沿反方向跟随对 v v v 存入的边到 u u u
然后沿反方向跟随对 u u u 存入的边到它的祖先,并且继续下去直到我们到达源点 s s s 。
- 为构造 P_v,我们只不过从 v v v 开始,沿反方向跟随对 v v v 存入的边到 u u u
Dijkstra 算法正确性
证明算法的正确性即证明路径 P u P_u Pu 确实是最短路径。
Diikstra 算法在下述意义上是贪心法,我们用一条边加上一支在 S 中的路径总可以构造一支最短的新的 s-v 路径。通过归纳证明它“领先于”所有其他的解,即确定每一次它选了一条到结点 v v v 的路径,这条路径比每条到的其他可能的路径都要短。
证明
通过在 S 的大小上的归纳来证明这个定理;
- ∣ S ∣ = 1 |S|=1 ∣S∣=1 此时有 S = s S={s} S=s 和 d ( s ) = 0 d(s)=0 d(s)=0
- 当 ∣ S ∣ = k , k ≥ 1 |S|=k,k≥1 ∣S∣=k,k≥1 时,加入结点 v v v 使得 ∣ S ∣ = k + 1 |S|=k+1 ∣S∣=k+1 ,令 ( u , v ) (u,v) (u,v) 是路径上的最后一条边
根据归纳假设:路径 P u P_u Pu 是对某个结点 u ∈ S u\in S u∈S 的最短 s-u 路径
考虑任意其他的 s-v 路径 P P P,要证明它至少与 P v P_v Pv 一样长,为了到达 v v v ,这条路径 P P P 一定在某个地方离开集合 S S S :
设 y y y 是在 P P P 上但不在 S S S 中的第一个结点,且设 x ∈ S x\in S x∈S 是紧接在 y y y 前面的结点,如下图所示
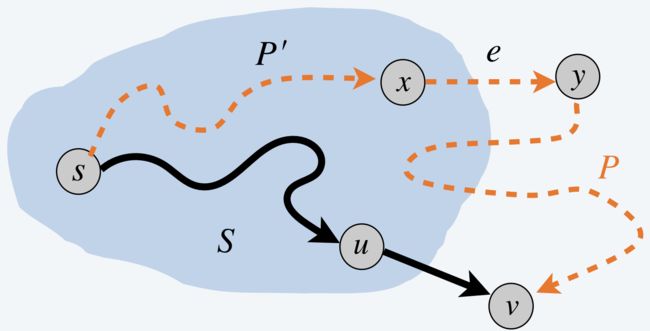
证明的关键非常简单: P P P 不可能比 P v P_v Pv 短,因为到它离开集合 S S S 的时刻至少已经与 P v P_v Pv 一样长。在第 k + 1 k+1 k+1 次选代中,Diikstra 算法一定已经考虑过通过边 ( x , y ) (x,y) (x,y) 把结点 y y y 加到 S S S 中,但是由于加 v v v 更有利而放弃了这个选择。这就意味着没有从 s s s 经过到 y y y 且比 P v P_v Pv 更短的路径。同时 P P P 中到 y y y 为止的子路径是至少与 P v P_v Pv 一样长的路径
令 P ′ P' P′ 代表 P P P 的从 s s s 到 x x x 的子路径。
-
因为 x ∈ S x\in S x∈S ,根据归纳假设 P x P_x Px 是最短的 s-x 路径,且长度为 d ( x ) d(x) d(x) ,因此 l ( P ′ ) ≥ l ( P x ) = d ( x ) l(P')\ge l(P_x)=d(x) l(P′)≥l(Px)=d(x)
-
于是 P P P 的到结点 y y y 的子路径 l ( P ) l(P) l(P) 有长度 l ( P ′ ) + l ( x , y ) ≥ d ( x ) + l ( x , y ) ≥ d ′ ( y ) l(P')+l(x,y)\ge d(x)+l(x,y) \ge d'(y) l(P′)+l(x,y)≥d(x)+l(x,y)≥d′(y)
-
因为 Dijkstra 算法在这次迭代中选择了 v v v 而不是 y y y 所以 d ′ ( y ) ≥ d ′ ( v ) = l ( P v ) d'(y)\ge d'(v)=l(P_v) d′(y)≥d′(v)=l(Pv) 。
上述不等式组合起来可证明: l ( P ) ≥ l ( P ′ ) + l ( x , y ) ≥ l ( P v ) l(P)\ge l(P')+l(x,y)\ge l(P_v) l(P)≥l(P′)+l(x,y)≥l(Pv)
Dijkstra 算法的复杂度
- 对于具有 n n n 个结点的图:While 循环的迭代有 n − 1 n-1 n−1 次,每次迭代把一个新结点 v v v 加到 S S S 中。有效选择正确的结点 v v v 是比较复杂的事情。如果考虑每个结点 v ∈ S v\in S v∈S 并且检查所有在 S S S 与 v v v 之间的边以确定最小值
- 对于具有 m m m 条边的图,计算所有这些最小值可能用 O ( m ) O(m) O(m) 时间
- 运行时间为 O ( m n ) O(mn) O(mn)
优化
对于最小值的确定可以采取一定的优化措施
对每个结点 v ∈ V − S v\in V-S v∈V−S 维护最小值 d ′ ( v ) = min e = ( u , v ) , u ∈ S d ( u ) + l e d'(v)= \min_{e=(u,v),u\in S} d(u)+l_e d′(v)=mine=(u,v),u∈Sd(u)+le ,而不是在每次迭代时重新计算
同时将 V-S 的结点保存在一个以 d ′ ( v ) d'(v) d′(v) 作为其关键字的优先队列里来进一步改进算法的效率
- 优先队列:用于维护 n 个元素集合的数据结构,每个元素具有一个关键字。一个优先队列可以有效地插入元素、删除元素、改变一个元素的关键字以及取出具有最小关键字的元素。
使用优先队列,Dijkstra 算法可以在具有 n 个结点和 m 条边的图上,实现运行在 O ( m ) O(m) O(m) 时间,加上 n 次 ExtractMin 操作和 m 次ChangeKey 操作的时间.
每个优先队列的操作可以运行在 O ( log n ) O(\log n) O(logn) 时间
于是对于这个实现的总时间是 O ( m log n ) O(m\log n) O(mlogn)
import heapq
def dijkstra(graph, start):
distances = {node: float('inf') for node in graph}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_node = heapq.heappop(priority_queue)
if current_distance > distances[current_node]:
continue
for neighbor, weight in graph[current_node].items():
distance = current_distance + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
# Example graph
graph = {
'A': {'B': 4, 'C': 2},
'B': {'A': 4, 'C': 5, 'D': 10},
'C': {'A': 2, 'B': 5, 'D': 3},
'D': {'B': 10, 'C': 3}
}
start_node = 'A'
result = dijkstra(graph, start_node)
print("Shortest distances from node", start_node, "to all other nodes:", result)
Dijkstra 算法的衍生
| priority queue | INSERT | DELETE-MIN | DECREASE-KEY | total |
|---|---|---|---|---|
| Node-indexed array (A[i] = priority of i) |
O ( 1 ) O(1) O(1) | O ( n ) O(n) O(n) | O ( 1 ) O(1) O(1) | O ( n 2 ) O(n^2) O(n2) |
| Binary heap | O ( log n ) O(\log n) O(logn) | O ( log n ) O(\log n) O(logn) | O ( log n ) O(\log n) O(logn) | O ( m log n ) O(m\log n) O(mlogn) |
| D-way heap (Johnson 1975) |
O ( d log d n ) O(d\log _dn) O(dlogdn) | O ( d log d n ) O(d\log _dn) O(dlogdn) | O ( log d n ) O(\log _dn) O(logdn) | O ( m log m / n n ) O(m\log _{m/n} n) O(mlogm/nn) |
| Fibonacci heap (Fredman–Tarjan 1984) |
O ( 1 ) O(1) O(1) | O ( log n ) O(\log n) O(logn) | O ( 1 ) O(1) O(1) | O ( m + n log n ) O(m+n\log n) O(m+nlogn) |
| Integer priority queue (Thorup 2004) |
O ( 1 ) O(1) O(1) | O ( log log n ) O(\log \log n) O(loglogn) | O ( 1 ) O(1) O(1) | O ( m + n log log n ) O(m+n\log \log n) O(m+nloglogn) |
SSSP的应用
- PERT/CPM(计划评审技术/关键路径法)
- 地图导航
- 缝隙雕刻(Seam Carving)
- 机器人导航
- 纹理映射
- LaTeX排版
- 城市交通规划
- 电话营销员排班
- 电信消息路由
- 网络路由协议(OSPF, BGP, RIP)
- 根据给定交通拥堵模式的最佳卡车路线