12.4在Linux中编写阻塞模式的SPI控制器驱动
编写驱动程序步骤
- 实现SPI总线设置的函数setup,用于设置SPI总线,若片选采用GPIO编号模式还需要在这里将GPIO设置为输出
- 实现SPI总线数据传输的函数transfer,用于传输SPI的数据报,它通常将spi_message放入到控制器的链表中,然后触发工作队列,去执行真正的发送任务。
- 通过spi_alloc_master分配一个struct spi_master,分配struct spi_master时还可以额外分配一段存储私有数据的空间(通过函数spi_master_get_devdata可以得到这段私有数据空间的地址)
- 初始化struct spi_master,主要包含设备树节点、支持的模式、支持的最大频率和最小频率、片选引脚是GPIO编号模式还是描述符模式、setup函数(用于设置SPI总线)、transfer函数(用于传输spi_message,若提供了transfer函数则是阻塞模式的SPI控制器驱动)
- 若片选采用GPIO编号模式还需要对片选引脚进行request操作,若片选采用GPIO描述符模式则无该步骤
- 通过spi_register_master注册SPI控制器驱动
- 设备或驱动卸载时spi_unregister_master注销SPI控制器
编写驱动程
这里编写一个虚拟的SPI控制器驱动,通过printk来输出SPI控制器的工作状态。
设备树编写
在顶层设备树根节点中加入如下节点:
virtual_spi_master {
compatible = "atk,virtual_spi_master";
status = "okay";
//片选列表,一个spi_master至少有一个片选
cs-gpios = <&gpioh 6 GPIO_ACTIVE_LOW>;
//片选数量
num-chipselects = <1>;
//reg中地址字段的字数,必须为1
#address-cells = <1>;
//reg中地址空间大小的字数,必须为0
#size-cells = <0>;
//一个spidev的设备节点,以便在应用层通过spidev来测试SPI控制器驱动
virtual_spi_dev: virtual_spi_dev@0 {
compatible = "rohm,dh2228fv";
reg = <0>;
spi-max-frequency = <100000>;
};
};
用make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- dtbs -j8编译设备树,用新的.dtb文件启动系统
驱动代码编写
完整的驱动代码如下所示:
#include 驱动测试程序编写
驱动测试程序基于spidev进行编写,它通过ioctl控制SPI总线进行数据收发,完整的代码如下所示:
/* 参考: tools\spi\spidev_fdx.c */
#include \n" , argv[0]);
return 0;
}
//打开spidev设备
fd = open(argv[1], O_RDWR);
if (fd < 0) {
printf("can not open %s\n", argv[1]);
return 1;
}
//通过ioctl控制SPI总线发送并接收一个字节的数据
tx_buf[0] = (unsigned char)strtoul(argv[2], NULL, 0);
rx_buf[0] = 0;
memset(xfer, 0, sizeof xfer);
xfer[0].tx_buf = (unsigned long)tx_buf;
xfer[0].rx_buf = (unsigned long)rx_buf;
xfer[0].len = 2;
status = ioctl(fd, SPI_IOC_MESSAGE(1), xfer);
if(status < 0)
{
printf("SPI_IOC_MESSAGE %d\n", errno);
return -1;
}
//打印接收到的数据
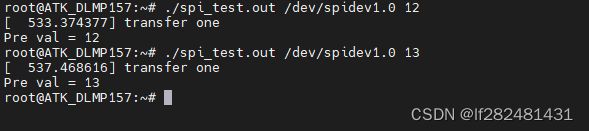
printf("Pre val = %d\n", rx_buf[0]);
return 0;
}
上机测试
- 修改设备树,增加虚拟SPI控制器的设备树节点,并在此节点中添加一个spidev的子节点,然后编译设备树,用新的设备树启动设备
- 从这里下载代码,使用make进行编译,然后使用make copy拷贝到目标板NFS跟文件系统的root目录中(执行make copy时需要确保Makefile中NFS根文件系统的路径正确)
- 在目标板中执行insmod spi_master.ko加载虚拟SPI控制器驱动(加载驱动时会提示”controller is unqueued, this is deprecated“,忽略这个提示即可,因为目前Linux更推荐使用队列模式的SPI控制器驱动)

- 执行命令./spi_test.out /dev/spidev1.0 12通过SPI总线发送1byte数据,同时将收到的数据打印出来(驱动中默认将发送的数据赋给接收)