树莓派+PCA9685+舵机控制:wiringPi实现
树莓派+PCA9685+舵机控制
1舵机控制
1.1舵机介绍
淘宝直接搜索舵机,有90° 180° 270° 360°舵机,通过PWM来进行控制,如下所示:

1.2控制原理
如下图所示:一个脉冲周期为20ms,高电平为脉冲宽度,这个脉冲宽度决定舵机旋转角度,假设180°舵机旋转位于中间位置(90°)的脉冲宽度为1.5ms,则0°位置为1ms,180°位置为2ms,以此类推,得出一下公式:
舵机旋转1°= (最大脉冲宽度-最小脉冲宽度)/最大角度(最大位置)

2PCA9685设备
2.1PCA9685设备地址
地址分配是通过模块右上方的短接焊盘来确定的,从A0-A5表示地址的最低位到最高位,也就是最多可级联2^5=32个模块,地址为: 1+A5+A4+A3+A2+A1+A0+rw。如果不用短接的话Ax=0;短接的话Ax=1;rw为写的话rw=0;rw为读的话rw=1;所以写入数据不做短接则地址应该为1000 0000 =0x80
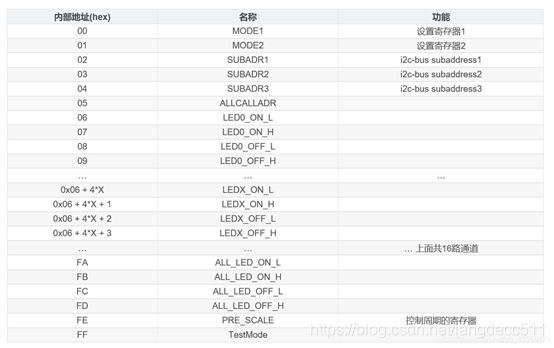
内部寄存器地址如下图所示:程序代码中有define定义,可以进行对照
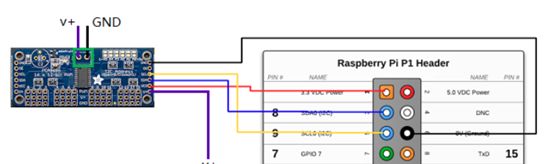
2.2IIC通信
SCL接树莓派SCL0,SDA接树莓派SDA0,VCC接3.3V,GND接树莓派GND,V+单纯只是供电
2.3.树莓派 开启IIC功能
sudo raspi-config -> 5.Interfacing Options -> P5 I2C 设置enable使能,然后在/boot/config.txt中进行配置,如下所示:
![]()
重启树莓派之后进行测试:
执行命令安装i2c-tools:
sudo apt-get install i2c-tools
再运行:
sudo i2cdetect -y 1
显示:
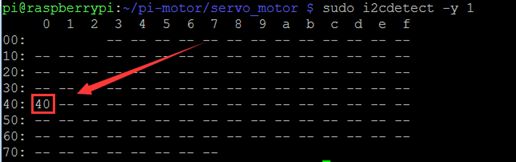
即本地址为0x40,记录下来,后面写程序需要。
3.程序
3.1整体连接图

我这里选择的是最后一个通道,编码为15(第一个通道编码为0)
代码在i2c_pca9685.c中,请自行查看
参考链接:
https://blog.csdn.net/qq_41559171/article/details/87950642
https://blog.csdn.net/asmallwhite/article/details/83048091
https://blog.csdn.net/weixin_42866931/article/details/90676372
https://blog.csdn.net/asmallwhite/article/details/83048091
C版本:
#include Python版本:
#!/usr/bin/python
import time
import math
import smbus
# ============================================================================
# Raspi PCA9685 16-Channel PWM Servo Driver
# ============================================================================
class PCA9685:
# Registers/etc.
__SUBADR1 = 0x02
__SUBADR2 = 0x03
__SUBADR3 = 0x04
__MODE1 = 0x00
__PRESCALE = 0xFE
__LED0_ON_L = 0x06
__LED0_ON_H = 0x07
__LED0_OFF_L = 0x08
__LED0_OFF_H = 0x09
__ALLLED_ON_L = 0xFA
__ALLLED_ON_H = 0xFB
__ALLLED_OFF_L = 0xFC
__ALLLED_OFF_H = 0xFD
def __init__(self, address=0x40, debug=False):
self.bus = smbus.SMBus(1)
self.address = address
self.debug = debug
if (self.debug):
print("Reseting PCA9685")
self.write(self.__MODE1, 0x00)
def write(self, reg, value):
"Writes an 8-bit value to the specified register/address"
self.bus.write_byte_data(self.address, reg, value)
if (self.debug):
print("I2C: Write 0x%02X to register 0x%02X" % (value, reg))
def read(self, reg):
"Read an unsigned byte from the I2C device"
result = self.bus.read_byte_data(self.address, reg)
if (self.debug):
print("I2C: Device 0x%02X returned 0x%02X from reg 0x%02X" % (self.address, result & 0xFF, reg))
return result
def setPWMFreq(self, freq):
"Sets the PWM frequency"
prescaleval = 25000000.0 # 25MHz
prescaleval /= 4096.0 # 12-bit
prescaleval /= float(freq)
prescaleval -= 1.0
if (self.debug):
print("Setting PWM frequency to %d Hz" % freq)
print("Estimated pre-scale: %d" % prescaleval)
prescale = math.floor(prescaleval + 0.5)
if (self.debug):
print("Final pre-scale: %d" % prescale)
oldmode = self.read(self.__MODE1);
newmode = (oldmode & 0x7F) | 0x10 # sleep
self.write(self.__MODE1, newmode) # go to sleep
self.write(self.__PRESCALE, int(math.floor(prescale)))
self.write(self.__MODE1, oldmode)
time.sleep(0.005)
self.write(self.__MODE1, oldmode | 0x80)
def setPWM(self, channel, on, off):
"Sets a single PWM channel"
self.write(self.__LED0_ON_L+4*channel, on & 0xFF)
self.write(self.__LED0_ON_H+4*channel, on >> 8)
self.write(self.__LED0_OFF_L+4*channel, off & 0xFF)
self.write(self.__LED0_OFF_H+4*channel, off >> 8)
if (self.debug):
print("channel: %d LED_ON: %d LED_OFF: %d" % (channel,on,off))
def setServoPulse(self, channel, pulse):
"Sets the Servo Pulse,The PWM frequency must be 50HZ"
pulse = pulse*4096/20000 #PWM frequency is 50HZ,the period is 20000us
self.setPWM(channel, 0, pulse)
channel = 14
if __name__=='__main__':
pwm = PCA9685(0x40, debug=True)
pwm.setPWMFreq(50)
while True:
# setServoPulse(2,2500)
for i in range(500,2500,10):
pwm.setServoPulse(channel,i)
time.sleep(0.02)
for i in range(2500,500,-10):
pwm.setServoPulse(channel,i)
time.sleep(0.02)
———————————————————————————————————————————
2022.10.16更新
舵机无法工作请参考如下解决方案:
1.PCA9685的V+与树莓派的5V引脚连接
2.重装smbus (高版本的树莓派系统存在兼容性问题)
3.检查SDA-SDA SCL-SCL引脚是否连接错误,注意是否接反。