立创梁山派GD32F450ZGT6--通过PCA9685控制16路舵机
PCA9685芯片,每一路LED输出端均可自由调节PWM波的频率 (40~1000Hz) 和占空比 (0%~100%) 。这款芯片主要通过输出不同占空比的PWM脉冲信号来控制舵机转动的角度。是16通道12bit PWM舵机驱动,用2个引脚通过I2C就可以驱动16个舵机。
模块的样子:

使用电路:

这里我使用的是电路,没有买模块;电路已在嘉立创打板验证成功。(嘉立创牛批!)
PCA9685系统框图

既然是IIC,那么IIC的地址是什么?
PCA9685 是一个I2C 从设备,有个设备ID,或者叫从 地址。从地址是如下确定的:
Board 0: Address = 0×40 Offset = binary 00000 (默认)
Board 1: Address = 0×41 Offset = binary 00001 (A0接上拉)
Board 2: Address = 0×42 Offset = binary 00010 (接上A1上拉)
Board 3: Address = 0×43 Offset = binary 00011 (A0和A1上拉)
Board 4: Address = 0×44 Offset = binary 00100 (A2上拉)
以此类推;
PCA9685的I2 c总线从地址如下图所示。为了节约电力,硬件可选地址引脚上没有内部上拉电阻,它们必须被拉高或拉低。
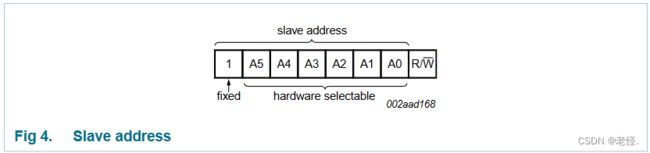
地址字节的最后一位定义要执行的操作。当设置为逻辑1时,将选择读操作,而逻辑0则选择写操作
在电路中,
我的地址线全部接0,所以我的slave address是0x40。
对应Fig 4上的位置,则为
| 固定位 | A5 | A4 | A3 | A2 | A1 | A0 | R/W |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | X |
则IIC地址是 0x80 ,写入时是0x80,读取时是0x81。
设置PWM频率
舵机控制所需的 PWM 周期为20 ms. 在用 PCA9685 作为多舵机控制器时,需要将 其 PWM 输出周期设定为20 ms,即PWM 波的频率设定为50 Hz,PCA9685 输出频率与振荡器有关,频率的设置值refresh_rate见下面的公式;
其中,EXTCLK是PCA9685的内部时钟频率为25Mhz;prescale是要设置的频率,我们设置为50Hz;

refresh_rate = 25,000,000 /( 4096 * ( 50 + 1 ))
refresh_rate = 25,000,000 / 4096 / (50 + 1)
refresh_rate = 6,103.52 / (50 + 1)
refresh_rate = 6,103.52 / 51
refresh_rate = 119.68
所以我们需要设置的值是119.68,取整数就是120。
需要注意的是,频率的更改只能在 PCA9685 芯片处于休眠状态下进行。
以下加粗字体是数据手册内容:
要使用EXTCLK引脚,该位必须按以下顺序设置:
1. 在mode1中设置SLEEP位。这就关闭了内部振荡器,使芯片处于休眠状态。
2. 将逻辑1写入MODE1中的SLEEP和EXTCLK位。这样就转换完成了。外部时钟可以在切换期间处于活动状态,因为设置了SLEEP位。
这个位是一个“粘性位”,也就是说,它不能通过写入逻辑0来清除。EXTCLK位只能通过电源循环或软件重置来清除。
占空比或者脉冲宽度的设定
每个PWM引脚输出的开启时间和PWM的占空比可以通过LEDn_ON和LEDn_OFF寄存器独立控制。
每个PWM引脚输出将有两个12位寄存器。这些寄存器将由用户编程。两个寄存器都将保存从0到4095的值。一个12位寄存器将保存ON时间的值,另一个12位寄存器将保存OFF时间的值。将ON和OFF时间与12位计数器的值进行比较,该计数器将从0000h持续运行到0FFFh(0到4095十进制)。
ON时间是可编程的,它是PWM输出ON的时间,OFF时间也是可编程的,它是PWM输出OFF的时间。这样相移就完全可编程了。相移的分辨率为目标频率的1 / 4096。表7列出了这些寄存器。
以下用一个例子说明如何计算要加载到这些寄存器中的值。
(假设使用LED0输出,(延时时间)+ (PWM占空比)<=100%)
延迟时间 = 10%;PWM占空比= 20% (LEDON电平= 20%;LEDOFF时间= 80%)。延迟时间= 10% = 4096 * 0.1 = 409.6 ~ 410,计数= 410(十进制) = 19Ah(十六进制)
因为计数器从0开始,到4095结束,我们将减去1,所以延迟时间 = 199h 个数。
LED0_ON_H = 1h;LED0_ON_L = 99h (LED开始打开后,这个延迟计数到409)
-
LED开机时间= 20% = 819.2 ~ 819次
-
LED关闭时间= 4CCh(十进制410 + 819-1 = 1228)
-
LED0_OFF_H = 4h;LED0_OFF_L = CCh(此计数到1228后LED开始关闭)

整个周期为4095, LED_ON 和 LED_OFF 2个的设定值确定脉宽,在后面的代码里,LED_ON 设为0, LED_OFF就是脉宽了。 这里都用2位字节来表示。
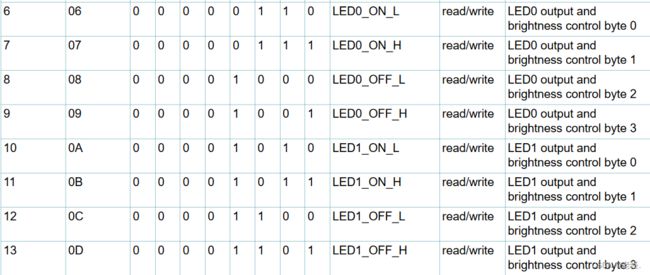
相关地址表

![]()
这里只截图了需要的地址,分别是:
#define PCA_Addr 0x80 //IIC地址
#define PCA_Model 0x00
#define LED0_ON_L 0x06
#define LED0_ON_H 0x07
#define LED0_OFF_L 0x08
#define LED0_OFF_H 0x09
#define PCA_Pre 0xFE //配置频率地址
OK! 手册看完,到代码部分了
使用的是立创梁山派的GD32F450RGT6,IIC部分使用的是正点原子的STM32F407VET6的IIC代码。
PCA9685.c
#include "pca9685.h"
#include
void PCA9685_Init(float hz,u8 angle)
{
u32 off = 0;
IIC_Init();
//在MODE1地址上写0x00
PCA9685_Write(PCA_Model,0x00); //这一步很关键,如果没有这一步PCA9685就不会正常工作。
// pwm.setPWMFreq(SERVO_FREQ)函数主要是设置PCA9685的输出频率,
// PCA9685的16路PWM输出频率是一致的,所以是不能实现不同引脚不同频率的。
// 下面是setPWMFreq函数的内容,主要是根据频率计算PRE_SCALE的值。
PCA9685_setFreq(hz);
//计算角度
off = (u32)(145+angle*2.4);
//控制16个舵机输出off角度
PCA9685_setPWM(0,0,off);
PCA9685_setPWM(1,0,off);
PCA9685_setPWM(2,0,off);
PCA9685_setPWM(3,0,off);
PCA9685_setPWM(4,0,off);
PCA9685_setPWM(5,0,off);
PCA9685_setPWM(6,0,off);
PCA9685_setPWM(7,0,off);
PCA9685_setPWM(8,0,off);
PCA9685_setPWM(9,0,off);
PCA9685_setPWM(10,0,off);
PCA9685_setPWM(11,0,off);
PCA9685_setPWM(12,0,off);
PCA9685_setPWM(13,0,off);
PCA9685_setPWM(14,0,off);
PCA9685_setPWM(15,0,off);
delay_1ms(100);
}
void PCA9685_Write(u8 addr,u8 data)
{
IIC_Start();
IIC_Send_Byte(PCA_Addr);
IIC_NAck();
IIC_Send_Byte(addr);
IIC_NAck();
IIC_Send_Byte(data);
IIC_NAck();
IIC_Stop();
}
u8 PCA9685_Read(u8 addr)
{
u8 data;
IIC_Start();
IIC_Send_Byte(PCA_Addr);
IIC_NAck();
IIC_Send_Byte(addr);
IIC_NAck();
IIC_Stop();
delay_us(10);
IIC_Start();
IIC_Send_Byte(PCA_Addr|0x01);
IIC_NAck();
data = IIC_Read_Byte(0);
IIC_Stop();
return data;
}
//设置第num个PWM引脚,on默认为0,控制舵机旋转off角度
void PCA9685_setPWM(u8 num,u32 on,u32 off)
{
IIC_Start();
IIC_Send_Byte(PCA_Addr);
IIC_Wait_Ack();
IIC_Send_Byte(LED0_ON_L+4*num);
IIC_Wait_Ack();
IIC_Send_Byte(on&0xFF);
IIC_Wait_Ack();
IIC_Send_Byte(on>>8);
IIC_Wait_Ack();
IIC_Send_Byte(off&0xFF);
IIC_Wait_Ack();
IIC_Send_Byte(off>>8);
IIC_Wait_Ack();
IIC_Stop();
}
/*
说明:
floor语法:
FLOOR(number, significance)
Number必需。要舍入的数值。
Significance必需。要舍入到的倍数。
说明
将参数 number 向下舍入(沿绝对值减小的方向)为最接近的 significance 的倍数。
如果任一参数为非数值型,则 FLOOR 将返回错误值 #VALUE!。
如果 number 的符号为正,且 significance 的符号为负,则 FLOOR 将返回错误值 #NUM!
示例
公式 说明 结果
FLOOR(3.7,2) 将 3.7 沿绝对值减小的方向向下舍入,使其等于最接近的 2 的倍数 2
FLOOR(-2.5, -2) 将 -2.5 沿绝对值减小的方向向下舍入,使其等于最接近的 -2 的倍数 -2
*/
void PCA9685_setFreq(float freq)
{
u8 prescale,oldmode,newmode;
double prescaleval;
// freq *= 0.9; // Correct for overshoot in the frequency setting (see issue #11).
// PCA9685的内部时钟频率是25Mhz
// 公式: presale_Volue = round( 25000000/(4096 * update_rate) ) - 1
// round = floor(); floor是数学函数,需要导入 math.h 文件
// update_rate = freq;
prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
prescale = floor(prescaleval+0.5f);
//返回MODE1地址上的内容(保护其他内容)
oldmode = PCA9685_Read(PCA_Model);
//在MODE1中设置SLEEP位
newmode = (oldmode&0x7F)|0x10;
//将更改的MODE1的值写入MODE1地址,使芯片睡眠
PCA9685_Write(PCA_Model,newmode);
//写入我们计算的设置频率的值
//PCA_Pre = presale 地址是0xFE,可以数据手册里查找到
PCA9685_Write(PCA_Pre,prescale);
//重新复位
PCA9685_Write(PCA_Model,oldmode);
//等待复位完成
delay_1ms(5);
//设置MODE1寄存器开启自动递增
PCA9685_Write(PCA_Model,oldmode|0xa1);
}
//设置角度
void setAngle(u8 num,u8 angle)
{
u32 off = 0;
off = (u32)(158+angle*2.2);
PCA9685_setPWM(num,0,off);
}
PCA9685.h
#ifndef _PCA9685_H_
#define _PCA9685_H_
#include "gd32f4xx.h"
#include "sys.h"
#include "systick.h"
#include "myiic.h"
#define PCA_Addr 0x80 //IIC地址
#define PCA_Model 0x00
#define LED0_ON_L 0x06
#define LED0_ON_H 0x07
#define LED0_OFF_L 0x08
#define LED0_OFF_H 0x09
#define PCA_Pre 0xFE //配置频率地址
void PCA9685_Init(float hz,u8 angle);
void PCA9685_Write(u8 addr,u8 data);
u8 PCA9685_Read(u8 addr);
void PCA9685_setPWM(u8 num,u32 on,u32 off);
void PCA9685_setFreq(float freq);
void setAngle(u8 num,u8 angle);
#endif
myiic.c
#include "myiic.h"
#include "systick.h"
#include "sys.h"
//初始化IIC
void IIC_Init(void)
{
//打开SDA与SCL的引脚时钟
rcu_periph_clock_enable(RCU_GPIOB);
//设置SCL引脚模式为下拉输出
gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, GPIO_PIN_8);
//设置引脚为推挽模式,翻转速度50MHz
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
//设置引脚输出高电平SCL等待信号
gpio_bit_write(GPIOB, GPIO_PIN_8, SET);
//设置SDA引脚
gpio_mode_set( GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, GPIO_PIN_9 );
gpio_output_options_set( GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9 );
gpio_bit_write( GPIOB, GPIO_PIN_9, RESET);
gpio_bit_write(GPIOB, GPIO_PIN_9, SET);
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
myiic.h
#ifndef __MYIIC_H
#define __MYIIC_H
#include "sys.h"
//IO方向设置
//#define SDA_IN() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=0<<9*2;} //PB9输入模式
//#define SDA_OUT() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=1<<9*2;} //PB9输出模式
#define SDA_IN() {gpio_mode_set(GPIOB, GPIO_MODE_INPUT, GPIO_PUPD_PULLUP, GPIO_PIN_9);} //PB9输入模式
#define SDA_OUT() {gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP, GPIO_PIN_9);} //PB9输出模式
//IO操作函数
#define IIC_SCL PBout(8) //SCL
#define IIC_SDA PBout(9) //SDA
#define READ_SDA PBin(9) //输入SDA
//IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
main.c
#include "gd32f4xx.h"
#include "systick.h"
#include "led.h"
#include "pca9685.h"
int main(void)
{
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2); // 优先级分组
systick_config(); //系统滴答定时器 定时1us
PCA9685_Init(60,90); //PCA9685--16路舵机初始化 频率60Hz -- 180度
while(1)
{
}
}
资料参考:(感谢各位前辈大佬)
PCA9685 多舵机控制器的编程_leon_zeng0的博客-CSDN博客_pca9685
http://wiki.sunfounder.cc/index.php?title=PCA9685_16_Channel_12_Bit_PWM_Servo_Driver
代码与PCA9685英文数据手册链接:
链接:https://pan.baidu.com/s/1kRdrESL4OOLy1mgnnN_ohA?pwd=1234
提取码:1234