APM无人机软件在环仿真环境搭建
题记:最近做毕业设计得用到无人机仿真,重操旧业,搞一搞SITL仿真。
给个传送门参考:无人机SITL仿真
APM软件在环仿真
我的环境:ubuntu18.04虚拟机
1.官方教程
ardupilot官网和官方git帐号,里面有很多东西可以学习。
- APM官方教程
- APM官方git
- AmovLab案例
1)先安装编译环境,Setting up the Build Environment;
具体步骤如下:
# 1.更新并安装git
sudo apt-get update
sudo apt-get install git
sudo apt-get install gitk git-gui
# 2.clone repo
cd ~/
git clone https://github.com/ArduPilot/ardupilot.git
cd ardupilot
git submodule update --init --recursive
# 3.install some required packages
Tools/environment_install/install-prereqs-ubuntu.sh -y
. ~/.profile
成功后应该是这样的,此后就可以进行仿真了。
 接下来可以按照BUILD.md中的进行waf编译。
接下来可以按照BUILD.md中的进行waf编译。
# 编译SITL
./waf configure --board sitl
./waf copter
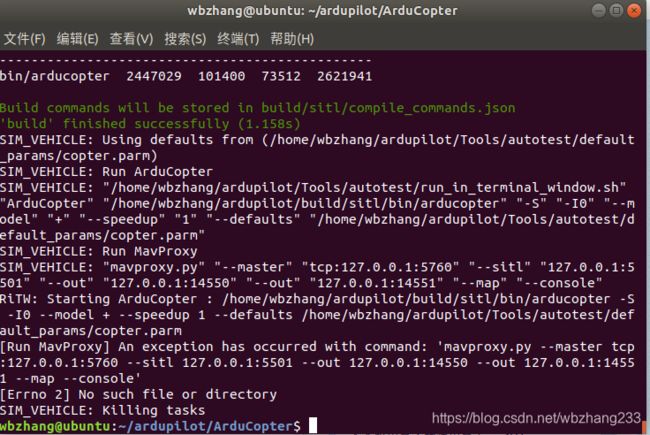
这里记录一下我遇到的一个关于Mavproxy的问题。
这个
从APM官方git中,下载安装Mavproxy即可,注意之后将build/scripts2.7/中的文件拷贝到~/.local/lib/python2.7/site-packages/MAVProxy-1.8.18.dist-info/scripts/下,问题解决。
附加:查看可用的板子命令
./waf list_boards
结果如下:

# 4.Add some directories to your search path (Facultative)
# 把下面语句加入~/.bashrc文件中
export PATH=$PATH:$HOME/ardupilot/Tools/autotest
export PATH=/usr/lib/ccache:$PATH
# 然后使用点命令重新载入
. ~/.bashrc
接下来:
2)开始SITL simulator
# 1.启动SITL仿真
cd ardupilot/ArduCopter
# 以下语句擦出缓存,并且采用默认配置
sim_vehicle.py -w
# ctrl+c推出并且按下
sim_vehicle.py --console --map
# 附加:安装并更新pymavlink和mavproxy
pip install --upgrade pymavlink MAVProxy --user
默认配置时会弹出一个窗口,取消后再sim_vehicle.py --console --map之后会有三个窗口,表示SITL成功运行啦。如下:
3)使用gazebo仿真器
APM_Gazebo官方教程
得先git clone ardupilot_gazebo
# 1.安装并更新gazebo,原文建议用gazebo9;推荐在ubuntu18.04下操作啦
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt update
sudo apt install gazebo9 libgazebo9-dev
# 以下打开一个gazebo新world
gazebo --verbose
# 虚拟机中若遇到问题
echo “export SVGA_VGPU10=0” >> ~/.bashrc # 关闭硬件加速
source ~/.bashrc #执行以下终端配置文件,其实最好重启终端
# 2.Plugin installation
git clone https://github.com/khancyr/ardupilot_gazebo
cd ardupilot_gazebo
mkdir build
cd build
cmake ..
make -j4
sudo make install
# 3.启动仿真器
cd ~/ardupilot_gazebo
gazebo --verbose worlds/iris_arducopter_runway.world
# another terminal
cd ~/ardupilot/ArduCopter
../Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map
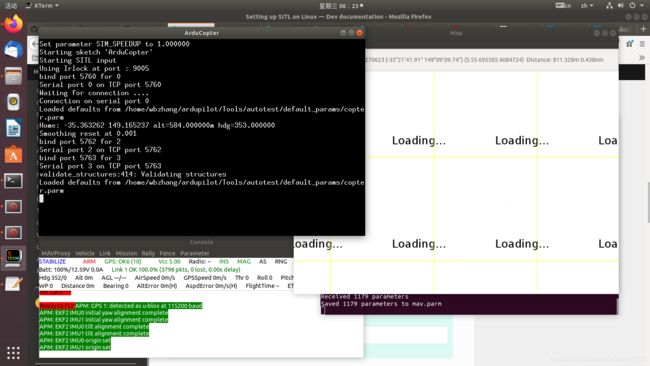
启动APM在gazebo中的SITL,如下:
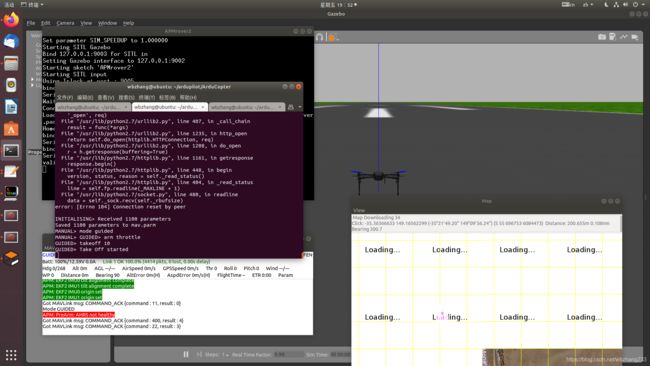 分别是map和Xterm、显示面板三个窗口。在终端可以输入命令:
分别是map和Xterm、显示面板三个窗口。在终端可以输入命令:
mode guided # 引导模式
arm throttle # 解锁油门
takeoff 10 #起飞至10m高度
# ...更多命令参考官方教程...
2.APM仿真使用
APM的指令暂时没找,记录一下常用的指令。更多内容可以参考最上方给出的传送门。
官方demoOctomapPlanner,官方git主页,官方在ubuntu16.04测试,基于opencv3,我在18.04虚拟机上做的,基于opencv4.1.1。
# 1.参考OctomapPlanner readme进行编译与安装
# ...
# 此处略去一大堆第三方库的安装。
# ...
git clone https://github.com/ardupilot/OctomapPlanner
cd OctomapPlanner
mkdir build
cd build
cmake ..
make
cp -r ../models/* ~/.gazebo/models/
# 2.使用
# 2.1 terminal 1 启动gazebo
cd ~/OctomapPlanner/
gazebo --verbose worlds/iris_gas_station_demo.world
# 2.2 terminal 2 启动APM SITL仿真
sim_vehicle.py -v ArduCopter -f gazebo-iris
# 输入以下指令起飞:
mode guided
arm throttle
takeoff 1
# 输入help即可查看更多命令及使用方法。
# 3 terminal 3 启动项目节点
./build/main_node
正常进入gazebo如下:
启动项目节点后如下,将弹出视差图窗口,并且无人机自主移动。
自主规划路径:
之后,我发现它自杀了,哈哈哈
记录一个问题,arm throttle之后会自动加锁,暂时不知道为何。

通过ROS话题来获取gazebo中双目相机的图片,gazebo双目相机
。
附上OctomapPlanner的两篇博客地址:
1)OctomapPlanner1
2)OctomapPlanner2
另外几个关于APM和avoidance的包.
-
HAWK
-
Obstacle_Avoidance_for_UAV
-
STOBA
-
APM精准降落
**APM官方的避障:object avoidance
**
3.mavros
关于APM飞控,使用ros和gazebo进行SITL仿真似乎还在开发中,GG。
详情参考:https://ardupilot.org/dev/docs/ros.html
另外这一块还有伴生嵌入式板子等内容,参考以上链接。
4.XTDrone
肖昆XTDrone: