卷积——相关知识点总结
一、2D卷积(2D Convolution)
1.公式
卷积运算(Convolution)定义:一种通过两个函数和生成第三个函数的一种数学算子,公式如下。通常将函数 f f f称为输入(input),函数 g g g称为卷积核(kernel),函数 h h h称为特征图谱(feature map)。
h ( t ) = ∫ g ( t − t ′ ) f ( t ) d t ′ h(t)= \int_\ {g(t-t')f(t)} \,{\rm d}t' h(t)=∫ g(t−t′)f(t)dt′
离散多维卷积(深度学习领域最常见的情况),即输入是一个多维数组,卷积核也是一个多维数组,时间上是离散的,因此无限的积分变成有限的数组有限元素的加和:
H ( i , j ) = ∑ m ∑ n F ( m , n ) G ( i − m , j − n ) H(i,j)= \sum_{m} \sum_{n}\ {F(m,n)G(i-m,j-n)} \ H(i,j)=m∑n∑ F(m,n)G(i−m,j−n)
上式表明先对卷积核翻转,再与输入点乘、求和得到输出。而在卷积的实现中通常省去了翻转,即其实为互相关(Cross-Correlation)。公式如下:
H ( i , j ) = ∑ m ∑ n F ( m , n ) G ( i + m , j + n ) H(i,j)= \sum_{m} \sum_{n}\ {F(m,n)G(i+m,j+n)} \ H(i,j)=m∑n∑ F(m,n)G(i+m,j+n)
注:1).数学中的卷积,根据使用场景(例:信号强度随时间衰弱),故
需‘’卷积核‘’翻转180度。
2).神经网络中的‘’卷积‘’,为了提取图像特征,只借鉴了加权求和
的特点。 其卷积核由于是不断学习更新的,故不需翻转。
且数学中的‘’卷积核‘’是给定的,而神经网络中可学习的未知参数。
2.核心思想
可参考花书P203-P207
(1).稀疏交互。局部连接(feature map局部与卷积核互相关),相对全连接网络参数大大减少。在二维图像中,局部像素的关联性强,CNN突出了对图像局部特征的强响应能力。
(2).参数共享。(卷积核的滑动)一个feature map共享一个卷积核的参数权重,相对全连接减少了整体参数量,增强了网络训练效率。
(3).等变表示。(参数共享–>平移等变)例:对图像进行右移后卷积,与先卷积后右移,得到的结果一样。即特征对位置不敏感,对分类有益,但对与位置相关的任务(如目标检测、语义分割)不利。
特点:下采样,降低图片分辨率,数据降维,使浅层的局部特征组合为深层特征。相对全连接,减少计算资源消耗,加速模型训练,有效控制过拟合。
3.计算公式
(1).特征图尺寸:
——1D\2D\3D卷积相同
o u t p u t = ⌊ i n p u t − k e r n e l + 2 ∗ p a d d i n g s t r i d e ⌋ + 1 output=\lfloor\frac{input-kernel+2*padding}{stride}\rfloor+1 output=⌊strideinput−kernel+2∗padding⌋+1
(2).参数量(parameters)
p a r a m s = C o × ( k w × k h × C i + 1 ) params={C_o}\times({k_w}\times{k_h}\times{C_i}+1) params=Co×(kw×kh×Ci+1)
其中, C o C_o Co表示输出通道数, C i C_i Ci表示输入通道数, k w × k h × C i {k_w}\times{k_h}\times{C_i} kw×kh×Ci表示一个卷积核的权重数量,1为bias参数量。故常规方形卷积核公式为:
p a r a m s = C o × ( k 2 × C i + 1 ) params={C_o}\times({k^2}\times{C_i}+1) params=Co×(k2×Ci+1)
另,全连接的参数量公式:
p a r a m s = ( I + 1 ) × O params=(I+1)\times{O} params=(I+1)×O
(3).FLOPs (floating point of operations),浮点运算次数。即计算量,衡量算法/模型复杂度。
F L O P s = [ ( C i × k w × k h ) + ( C i × k w × k h − 1 ) + 1 ] × C o × W × H FLOPs=[({C_i}\times{k_w}\times{k_h})+({C_i}\times{k_w}\times{k_h-1})+1]\times{C_o}\times{W}\times{H} FLOPs=[(Ci×kw×kh)+(Ci×kw×kh−1)+1]×Co×W×H
其中, ( C i × k w × k h ) ({C_i}\times{k_w}\times{k_h}) (Ci×kw×kh)表示一次卷积操作中的乘法运算量, ( C i × k w × k h − 1 ) ({C_i}\times{k_w}\times{k_h-1}) (Ci×kw×kh−1)表示一次卷积操作中的加法运算量,1表示bias的加法计算量, C o × W × H {C_o}\times{W}\times{H} Co×W×H表示feature map的所有元素数。故常规方形卷积核公式为:
F L O P s = C i × k 2 × C o × W × H FLOPs={C_i}\times{k^2}\times{C_o}\times{W}\times{H} FLOPs=Ci×k2×Co×W×H
注:区分,FLOPS (floating point of per second),每秒浮点运算次数。即计算速度,衡量硬件的性能。
另,全连接的FLOPs公式:
F L O P s = [ I + ( I − 1 ) + 1 × O ] = 2 × I × O FLOPs=[I+(I-1)+1\times{O}]=2\times{I}\times{O} FLOPs=[I+(I−1)+1×O]=2×I×O
其中, I I I为input neurons, O O O为output neurons,中括号中 I I I表示乘法运算量, I − 1 I-1 I−1表示加法运算量,1表示bias加法运算量, × O \times{O} ×O表示计算O个神经元的值。
4. 代码
(1).torch调用(省略常见基础参数)
参考torch官方文档
import torch.nn as nn
nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0,
dilation=1, groups=1, bias=True, padding_mode='zeros')
| 参数 | 描述 |
|---|---|
| padding_mode (str, optional) | 默认为'zeros',填充0;'reflect'以矩阵边缘为对称轴,将矩阵中的元素对称地填充到最外围;'replicate'将矩阵的边缘复制并填充到矩阵的外围;'circular'矩阵循环,以原矩阵为中心截取所需size矩阵。 参考样例 |
| dilation (int or tuple, optional) | 卷积核内元素间的间隔,默认为1。大于1时,即为空洞卷积。 |
| groups (int, optional) | 分组卷积,默认为1。 |
注:conv = nn.unfold + torch.matmul + nn.fold
(2).基于python 与 numpy 的实现
import numpy as np
def zero_pad(x, pad_height, pad_width):
H, W = x.shape
out = np.zeros((H+2*pad_height, W+2*pad_width))
out[pad_height:pad_height+H, pad_width:pad_width+W] = x # 在tensor中填入x
return out
def conv_fast(input, kernel):
H, W = input.shape
h, w = kernel.shape
out = np.zeros((H, W))
# 自适应padding,input.size() == output.size()
pad_height = h // 2
pad_width = w // 2
input_padding = zero_pad(input, pad_height, pad_width)
for i in range(H):
for j in range(W):
out[i][j] = np.sum(np.multiply(kernel, input_padding[i:(i+h), j:(j+w)])) # 加权求和后填入out的对应位置,stride=1
return out
input = np.array([[1, 2, 3, 4],
[5, 6, 7, 8],
[9, 10, 11, 12],
[13, 14, 15, 16]])
kernel = np.array([[-1, -2, -1],
[0, 0, 0],
[1, 2, 1]])
print('output:')
print(conv_fast(input, kernel))
5.延伸知识
(1).提取特征类型:
浅层卷积–>边缘特征;中层卷积–>局部特征;深层卷积–>全局特征
(2).大小卷积核:
常用的3x3卷积核,其两个叠加与5x5卷积核感受野大小一致,但参数量仅为5x5的10/13。且多进行的卷积操作,增加了模型的非线性表达能力。
大卷积核(如7x7、9x9),在GAN、图像超分辨率、图像融合领域有较多应用。
(3).1x1卷积作用:
1).使特征信息交互、整合;
2).对特征图升维、降维(减少参数量);
3).增加非线性,提升网络表达能力。
(4).卷积核个数:输入通道数x输出通道数;bias个数:输出通道数。(参考验证)
(5).感受野Receptive field (RF):在CNN中,为一层输出的特征图中每个元素在原始图像上映射的区域大小。
计算公式: R F i = s t r i d e × ( R F i + 1 − 1 ) + k e r n e l RF_i={stride}\times({RF_{i+1}}-1)+kernel RFi=stride×(RFi+1−1)+kernel (更多参考)
(x).全连接层:
1).将高维特征映射到label空间,可作为网络的分类器模块,可用于迁移学习;
2).可使用全局平均池化(GAP)替代全连接层,既保持性能又减少参数。
二、其他卷积
1.1D卷积(1D Convolution)
一维卷积常用于序列模型,自然语言处理领域。
![]()
- 代码(参数同2D卷积)
-
import torch.nn as nn nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')size of feature map size of kernel Conv1d ( N , C , L ) (N,C,L) (N,C,L) ( L k ) (L_k) (Lk) Conv2d ( N , C , H , W ) (N,C,H,W) (N,C,H,W) ( H k , W k ) (H_k,W_k) (Hk,Wk) 2.3D卷积(3D Convolution)
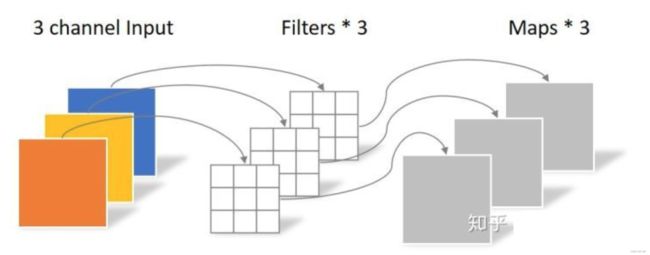
三维卷积被普遍用在视频分类、动作识别、三维医学图像分割等任务。

单通道的3D卷积过程,如上图所示。其与多通道2D卷积的区别在于在第三个维度(例如时间维度)卷积核的维度大小不是必须与输入该维度相等。卷积核在此方向上也进行滑动操作,故输出特征图也为3维。
上图为多通道3D卷积,与单通道2D卷积–>多通道2D卷积同理。 - 代码(参数同2D卷积)
-
import torch.nn as nn nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')size of feature map size of kernel Conv2d ( N , C , H , W ) (N,C,H,W) (N,C,H,W) ( H k , W k ) (H_k,W_k) (Hk,Wk) Conv3d ( N , C , D , H , W ) (N,C,D,H,W) (N,C,D,H,W) ( D k , H k , W k ) (D_k,H_k,W_k) (Dk,Hk,Wk) 3.分组卷积(Grouped Convolution)
groups参数为in_channels与out_channels的公约数。

忽略bias,分组卷积参数量、计算量公式如下:
p a r a m s = g × ( C o g × k 2 × C i g ) = 1 g p a r a m s c o n v 2 d params=g\times(\frac{C_o}{g}\times{k^2}\times\frac{C_i}{g})=\frac{1}{g}params_{conv2d} params=g×(gCo×k2×gCi)=g1paramsconv2d
F L O P s = g × ( C i g × k 2 × C o g × W × H ) = 1 g F L O P s c o n v 2 d FLOPs=g\times(\frac{C_i}{g}\times{k^2}\times\frac{C_o}{g}\times{W}\times{H})=\frac{1}{g}FLOPs_{conv2d} FLOPs=g×(gCi×k2×gCo×W×H)=g1FLOPsconv2d4.空洞卷积(Dilated Convolution)
空洞卷积最初的提出是为了解决图像分割的问题。常见的图像分割算法通常使用池化层和卷积层来增加感受野,同时也缩小了特征图尺寸,然后再利用上采样还原图像尺寸。特征图缩小再放大的过程造成了精度上的损失。而空洞卷积可以在增加感受野的同时保持特征图的尺寸不变(需padding),从而代替下采样和上采样操作。(引自文章)
空洞卷积卷积核大小: K e r n e l = k e r n e l + ( k e r n e l − 1 ) + ( d i l a t i o n − 1 ) Kernel = kernel+(kernel-1)+(dilation-1) Kernel=kernel+(kernel−1)+(dilation−1)
(1).作用:
1).扩大感受野:在deep net中,为能不丢失分辨率下扩大感受野,使用空洞卷积。这在检测,分割任务中十分有用:一方面感受野大了可以检测分割大目标;另一方面分辨率高了可以精确定位目标。
2).捕获多尺度上下文信息:设置不同dilation时,获得不同感受野,即获取了多尺度信息。ps:1).在实际中不好优化,速度会大大折扣。
2).语义分割由于需要获得较大的分辨率图,因此经常在网络的最后两个stage,取消下采样,采用空洞卷积弥补丢失的感受野。(2).gridding问题
1).局部信息丢失:由于其类似于棋盘格式的计算方式,卷积信息缺少相关性。
2).远距离获取的信息没有相关性:由于其稀疏的采样输入信号,使得远距离卷积得到的信息之间没有相关性,影响分类结果。更多参考:总结-空洞卷积(Dilated/Atrous Convolution)
5.转置卷积/反卷积(Transposed Convolution)
通过训练学习得到最优的上采样方式,替代传统的插值上采样,用于图像分割、图像融合、GAN等。
注:其不是卷积的反向操作,卷积运算不可逆,仅恢复尺寸,并非数值。
设卷积核尺寸 K ∗ K K*K K∗K,输入特征图尺寸 F ∗ F F*F F∗F。
(1).stride = 1,padding = 0:
先进行 p a d d i n g = K − 1 padding=K-1 padding=K−1的填充,再进行卷积转置运算,输出特征图尺寸: o u t p u t = F + ( K − 1 ) output=F+(K-1) output=F+(K−1)

(2).stride > 1,padding = 0:
先进行 p a d d i n g = K − 1 padding=K-1 padding=K−1的填充,相邻元素间空洞大小为 s t r i d e − 1 stride-1 stride−1,再进行卷积转置运算,输出特征图尺寸: o u t p u t = s t r i d e × ( F − 1 ) + K output=stride\times(F-1)+K output=stride×(F−1)+K

- 代码(参数同2D卷积)
-
import torch.nn as nn nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros')参数 描述 output_padding 输出特征图的扩充尺寸 1D\2D\3D转置卷积参数均相同,更多请参考官方文档
6.深度可分离卷积(Depthwise Separable Convolution)
- 逐通道卷积(Depthwise Convolution)
即分组卷积(groups=in_channels)
p a r a m s = k 2 × C i params={k^2}\times{C_i} params=k2×Ci F L O P s = C i × k 2 × W × H FLOPs={C_i}\times{k^2}\times{W}\times{H} FLOPs=Ci×k2×W×H- 逐点卷积(Pointwise Convolution)
即1x1卷积

深度可分离卷积参数量公式:
p a r a m s = k 2 × C i + C i × C o params={k^2}\times{C_i}+{C_i}\times{C_o} params=k2×Ci+Ci×Co
深度可分离卷积计算量公式:
F L O P s = C i × k 2 × W × H + C i × C o × W × H FLOPs={C_i}\times{k^2}\times{W}\times{H}+{C_i}\times{C_o}\times{W}\times{H} FLOPs=Ci×k2×W×H+Ci×Co×W×H
注:深度可分离卷积参数量是标准卷积的 1 C o + 1 k 2 \frac{1}{C_o}+\frac{1}{k^2} Co1+k21 - 代码(参数同2D卷积)
-
import torch.nn as nn class Depthwise_Separable_Conv(nn.Module): def __init__(self, ch_in, ch_out): super(Depthwise_Separable_Conv, self).__init__() self.depth_conv = torch.nn.Conv2d(ch_in, ch_in, kernel_size=3, groups=ch_in, bias=False) self.point_conv = torch.nn.Conv2d(ch_in, ch_out, kernel_size=1, bias=False) def forward(self, x): x = self.depth_conv(x) x = self.point_conv(x) return x7.空间可分卷积(Spatially Separable Convolution)& 平展卷积(Flattened convolutions)
参考自[3]
- 空间可分卷积

即常规3x3卷积分解为:3x1卷积核先于图像卷积,再应用1x3卷积核。相对卷积运算的9个参数变为6个。卷积乘法运算由 9 ∗ 9 = 81 9*9=81 9∗9=81降为 ( 5 ∗ 3 ) ∗ 3 + ( 3 ∗ 3 ) ∗ 3 = 72 。 (5*3)*3+(3*3)*3=72。 (5∗3)∗3+(3∗3)∗3=72。
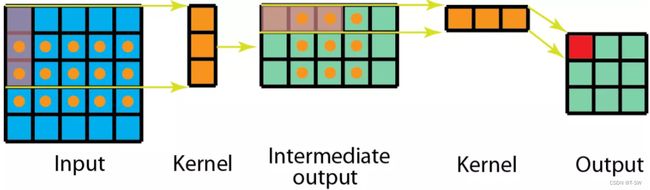
缺点:元素减少,可能搜索的内核减少,导致模型性能较差。- 平展卷积

如图所示,平展卷积将标准滤波器分解为3个1D滤波器,与空间可分卷积类似。 论文提到,随着分类问题难度的增加,将平展卷积直接应用于滤波器会导致显著的信息丢失。为了缓解此类问题,对感受野的连接进行限制,以便模型在训练时可以学习分解后的1D滤波器。通过使用由连续的 1D 过滤器组成的扁平化网络在 3D 空间的所有方向上训练模型,能够提供的性能与标准卷积网络相当,计算成本却更低很多。8.混洗分组卷积(Shuffled Grouped Convolution)
由旷视在ShuffleNet首次提出。如下图所示,两次分组卷积中进行通道混洗。以此弥补分组卷积缺少的信息传递,增加不同分组的特征之间的信息流动, 提高性能。

8.可变性卷积(Deformable Convolution)
可变形卷积将标准卷积操作中采样位置增加了一个偏移量offset,这样卷积核就能在训练过程中扩展到很大的范围。推广了尺度、长宽比和旋转的各种变换。


参考:
1.卷积 Convolution 原理及可视化
2.公众号:WeThinkIn
3.详述Deep Learning中的各种卷积