【ubuntu20.04上构建qemu启动linux kernel】
参考Ubuntu环境下使用qemu搭建arm64运行环境 - 简书
一、交叉编译工具
sudo apt install gcc-aarch64-linux-gnu
aarch64-linux-gnu-gcc -v二、linux内核编译
git clone https://github.com/torvalds/linux.git
cp arch/arm64/configs/virt.config .config
make ARCH=arm64 menuconfig
make ARCH=arm64 defconfig
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- all -j12
ls arch/arm64/boot/Image三、busybox制作rootfs
下载busybox 地址 : http://busybox.net/downloads/
export ARCH=arm64
export CROSS_COMPILE=aarch64-linux-gnu-配置
make menuconfig
注:此时应该全屏,然后进入配置页面, 设置成静态编译
Settings --->
[*] Build static binary (no shared libs)
编译安装
make
make CONFIG_PREFIX=./__install install
我们来创建其他需要的目录:
mkdir dev etc lib sys proc tmp var home root mnt
我们主要需要更新etc、dev和lib目录:
对于etc目录的更新:
添加profile文件:
#!/bin/sh
export HOSTNAME=liebao
export USER=root
export HOME=/home
export PS1="[HOSTNAME \W]# "
PATH=/bin:/sbin:/usr/bin:/usr/sbin
LD_LIBRARY_PATH=/lib:/usr/lib:$LD_LIBRARY_PATH
export PATH LD_LIBRARY_PATH
cd进入了我们制定的家目录homes,导出了环境变量。
添加inittab文件:etc/ 目录下新建一个 inittab 文件
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r
添加fstab文件:
#device mount-point type options dump fsck order
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tmpfs /dev tmpfs defaults 0 0
debugfs /sys/kernel/debug debugfs defaults 0 0
kmod_mount /mnt 9p trans=virtio 0 0
指定挂载的文件系统。
创建init.d目录:
mkdir init.d
init.d下添加rcS文件:
mkdir -p /sys
mkdir -p /tmp
mkdir -p /proc
mkdir -p /mnt
/bin/mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev -s
到此我们etc下的文件都制作好了,目录结构如下:
$ tree
.
├── fstab
├── init.d
│ └── rcS
├── inittab
└── profile
1 directory, 4 files
制作dev下必要文件:
cd dev/
sudo mknod console c 5 1
sudo mknod null c 1 3
制作lib下必要文件:为了支持动态编译的应用程序的执行,根文件系统需要支持动态库,所以我们添加arm64相关的动态库文件到lib下:
cd lib
cp /usr/aarch64-linux-gnu/lib/.so -a .
对库文件进行瘦身(去除符号表和调试信息),使得库文件变小:
aarch64-linux-gnu-strip *
至此,我们的最小的根文件系统已经全部制作完成!制作磁盘文件
cd busybox
dd if=/dev/zero of=rootfs_ext4.img bs=1M count=256
mkfs.ext4 rootfs_ext4.img
mkdir -p tmpfs
mount -t ext4 rootfs_ext4.img tmpfs/ -o loop
cp -af _install/* tmpfs/
umount tmpfs
rm -rf tmpfs
chmod 777 rootfs_ext4.img四、qemu启动
apt-get install qemu qemu-system qemu-user
apt-get install ninja-buildqemu-system-aarch64 -machine virt -cpu cortex-a57 -machine type=virt -m 512 -smp 2 -nographic \
-kernel Image \
-drive format=raw,file=rootfs_ext4.img \
-append "noinitrd root=/dev/vda rw console=ttyAMA0 loglevel=8" \
-fsdev local,id=kmod_dev,path=$PWD/kmodules,security_model=none \
-device virtio-9p-device,fsdev=kmod_dev,mount_tag=kmod_mount
#(命令参数介绍)Linker option :
#-cpu 指定处理器的架构
#-smp 指定处理器的个数
#-m 指定内存的大小
#-nographic 不启动图形界面
#-kernel 指定编译生成的内核镜像的存放位置
#-append 是内核启动的附加
#-drive 指定之前制作生成的根文件系统的镜像位置
五、共享文件夹
在当前目录创建kmodules文件
kmodules目录:通过mount可以查看被挂载到了qemu上的系统的/mnt目录下
在主机的内核源码目录的kmodules目录中echo一个文件:
六:GDB调试
安装
sudo apt install gdb-multiarchkernel打开
CONFIG_DEBUG_INFO宏
Kernel hacking --->
Compile-time checks and compiler options --->
[*] Compile the kernel with debug info
[*] Provide GDB scripts for kernel debugging
[*] Kernel debugging
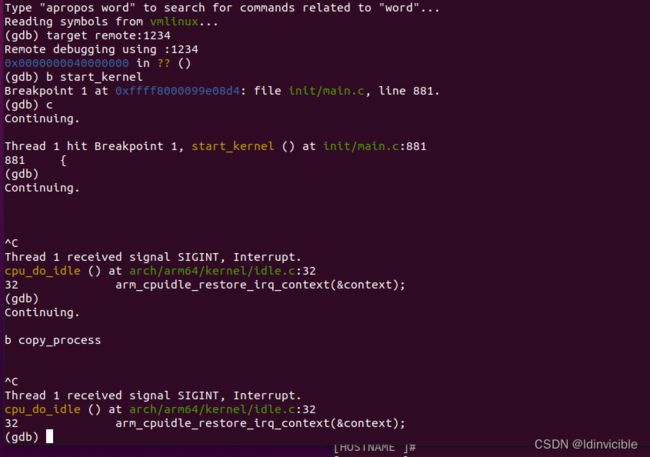
gdb vmlinux
(gdb)target remote:1234 # 建立gdb和gdbserver之间的连接
(gdb)break start_kernel # 断点的设置可以在 target remote 之前,也可以在之后
(gdb)continue # 让qemu上的Linux继续运行
注意要先跑qemu启动,但是会卡,此时运行起来,程序不会有任何的启动信息,只有挂上gdb并run后,才能正常启动