STM32——IIC知识总结及实战
1 IIC概念及结构体
IIC:Inter Integrated Circuit,集成电路总线,是一种同步 串行 半双工通信总线。

结构图

2 IIC协议时序

① 起始信号
当 SCL 为高电平期间,SDA 由高到低的跳变。起始信号是一种电平跳变时序信号,而不是一个电平信号。该信号由主机发出,在起始信号产生后,总线就处于被占用状态,准备数据传
输。
② 停止信号
当 SCL 为高电平期间,SDA 由低到高的跳变。停止信号也是一种电平跳变时序信号,而不是一个电平信号。该信号由主机发出,在停止信号发出后,总线就处于空闲状态。
③ 应答信号
发送器每发送一个字节,就在时钟脉冲 9 期间释放数据线,由接收器反馈一个应答信号。
应答信号为低电平时,规定为有效应答位(ACK 简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。
观察上图标号③就可以发现,有效应答的要求是从机在第 9 个时钟脉冲之前的低电平期间
将 SDA 线拉低,并且确保在该时钟的高电平期间为稳定的低电平。如果接收器是主机,则在它收到最后一个字节后,发送一个 NACK 信号,以通知被控发送器结束数据发送,并释放 SDA线,以便主机接收器发送一个停止信号。
④ 数据有效性
IIC 总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。数据在 SCL 的上升沿到来之前就需准备好。并在下降沿到来之前必须稳定。
⑤ 数据传输
在 I2C 总线上传送的每一位数据都有一个时钟脉冲相对应(或同步控制),即在 SCL 串行时钟的配合下,在 SDA 上逐位地串行传送每一位数据。数据位的传输是边沿触发。
⑥ 空闲状态
IIC 总线的 SDA 和 SCL 两条信号线同时处于高电平时,规定为总线的空闲状态。此时各个器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉高。
3 起止信号 停止信号 应答信号

起止信号:
void iic_start(void)
{ /* SCL为高电平期间, SDA从高电平往低电平跳变*/
IIC_SDA ( 1 );
IIC_SCL ( 1 );
iic_delay( );
IIC_SDA ( 0 );
iic_delay( );
IIC_SCL ( 0 );
iic_delay( ); /* 钳住总线, 准备发送/接收数据 /
}
停止信号:
void iic_stop(void)
{ / SCL为高电平期间, SDA从低电平往高电平跳变*/
IIC_SDA ( 0 );
iic_delay( );
IIC_SCL ( 1 );
iic_delay( );
IIC_SDA ( 1 ); /* 发送总线停止信号*/
iic_delay( );
}
主设备检测应答信号:主设备在释放 SDA 后,通过读取 SDA 的电平来检测从设备的应答信号。如果 SDA 保持低电平,表示从设备发送了应答信号,即 ACK。如果 SDA 为高电平,表示从设备未发送应答信号,即 NACK(无应答)。
uint8_t iic_wait_ack (void) /* return 1:fail 0:succeed*/
{
IIC_SDA (1); /* 主机释放SDA线 /
iic_delay( );
IIC_SCL (1); / 从机返回ACK*/
iic_delay( );
if ( IIC_READ_SDA ) /* SCL高电平读取SDA状态*/
{
iic_stop(); /* SDA高电平表示从机nack /
return 1;
}
IIC_SCL(0); / SCL低电平表示结束ACK检查 /
iic_delay( );
return 0;
}
应答信号:
void iic_ack(void)
{
IIC_SCL (0);
iic_delay( );
IIC_SDA (0); / 数据线为低电平,表示应答 /
iic_delay( );
IIC_SCL (1);
iic_delay( );
}
非应答信号:
void iic_nack(void)
{
IIC_SCL (0);
iic_delay( );
IIC_SDA (1); / 数据线为高电平,表示非应答 */
iic_delay( );
IIC_SCL (1);
iic_delay( );
}
写一个字节:
void iic_send_byte(uint8_t data)
{
for (uint8_t t = 0; t < 8; t++)
{ /* 高位先发 /
IIC_SDA((data & 0x80) >> 7);
iic_delay( );
IIC_SCL ( 1 );
iic_delay( );
IIC_SCL ( 0 );
data <<= 1; / 左移1位, 用于下一次发送 /
}
IIC_SDA ( 1 ); / 发送完成,主机释放SDA线 /
}
读取一个字节:
uint8_t iic_read_byte (uint8_t ack) / 1:ack 0:nack*/
{
uint8_t receive = 0 ;
for (uint8_t t = 0; t < 8; t++)
{ /* 高位先输出,先收到的数据位要左移 */
receive <<= 1;
IIC_SCL ( 1 );
iic_delay( );
if ( IIC_READ_SDA ) receive++;
IIC_SCL ( 0 );
iic_delay( );
}
if ( !ack ) iic_nack();
else iic_ack();
return receive;
5.AT24C02写时序
写时序
主机首先在 IIC 总线上发送起始信号,那么这时总线上的从机都会等待接收由主机发出的
数据。主机接着发送从机地址+0(写操作)组成的 8bit 数据,所有从机接收到该 8bit 数据后,自行检验是否是自己的设备的地址,假如是自己的设备地址,那么从机就会发出应答信号。主机在总线上接收到有应答信号后,才能继续向从机发送数据。
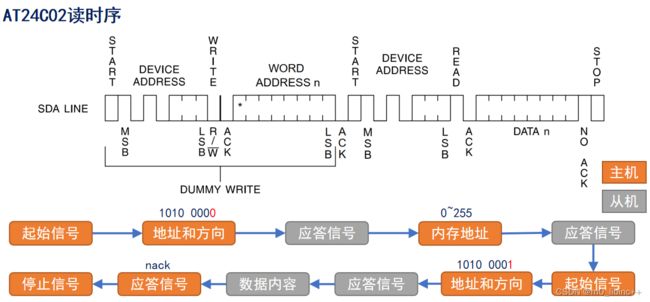
主机向从机读取数据的操作,一开始的操作与写操作有点相似,观察两个图也可以发现,
都是由主机发出起始信号,接着发送从机地址+1(读操作)组成的 8bit 数据,从机接收到数据验证是否是自身的地址。 那么在验证是自己的设备地址后,从机就会发出应答信号,并向主机返回 8bit 数据,发送完之后从机就会等待主机的应答信号。假如主机一直返回应答信号,那么从机可以一直发送数据,也就是图中的(n byte + 应答信号)情况,直到主机发出非应答信号,从机才会停止发送数据。
6 T24C02模块与各开发板引脚硬件连接说明


根据我们的板子设计,A0、A1 和 A2 均接地处理,所以 24C02 设备的读操作地址为:0xA1;写操作地址为:0xA0。设备地址最后一位用于设置数据的传输方向,即读操作/写操作,0 是写操作,1 是读操作
7配置步骤

8 实战
8.1myiic.c
#include "./BSP/IIC/myiic.h"
#include "./SYSTEM/delay/delay.h"
//使用 IIC 传输数据的配置步骤:
//1) 使能 IIC 的 SCL 和 SDA 对应的 GPIO 时钟。
//本实验中 IIC 使用的 SCL 和 SDA 分别是 PB8 和 PB9,因此需要先使能 GPIOB 的时钟
//2.2) 设置对应 GPIO 工作模式(开漏输出)
//本实验 GPIO 使用开漏输出模式(硬件已接外部上拉电阻,对于 F4 以上板子也可以用内部
//的上拉电阻),通过函数 HAL_GPIO_Init 设置实现。
//3) 参考 IIC 总线协议,编写信号函数(起始信号,停止信号,应答信号)
//起始信号:SCL 为高电平时,SDA 由高电平向低电平跳变。
//停止信号:SCL 为高电平时,SDA 由低电平向高电平跳变。
//应答信号:接收到 IC 数据后,向 IC 发出特定的低电平脉冲表示已接收到数据。
//4) 编写 IIC 的读写函数
/**
* @brief 初始化IIC
* @param 无
* @retval 无
*/
//2.2) 设置对应 GPIO 工作模式(开漏输出)
//本实验 GPIO 使用开漏输出模式(硬件已接外部上拉电阻,对于 F4 以上板子也可以用内部
//的上拉电阻),通过函数 HAL_GPIO_Init 设置实现。
void iic_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
IIC_SCL_GPIO_CLK_ENABLE(); /* SCL引脚时钟使能 */
IIC_SDA_GPIO_CLK_ENABLE(); /* SDA引脚时钟使能 */
gpio_init_struct.Pin = IIC_SCL_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 快速 */
HAL_GPIO_Init(IIC_SCL_GPIO_PORT, &gpio_init_struct);/* SCL */
gpio_init_struct.Pin = IIC_SDA_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 开漏输出 */
HAL_GPIO_Init(IIC_SDA_GPIO_PORT, &gpio_init_struct);/* SDA */
/* SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */
iic_stop(); /* 停止总线上所有设备 */
}
/**
* @brief IIC延时函数,用于控制IIC读写速度
* @param 无
* @retval 无
*/
static void iic_delay(void)
{
delay_us(2); /* 2us的延时, 读写速度在250Khz以内 */
}
//3) 参考 IIC 总线协议,编写信号函数(起始信号,停止信号,应答信号)
/**
* @brief 产生IIC起始信号
* @param 无
* @retval 无
*/
//起始信号:SCL 为高电平时,SDA 由高电平向低电平跳变。
void iic_start(void)
{
IIC_SDA(1);
IIC_SCL(1);
iic_delay();
IIC_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */
iic_delay();
IIC_SCL(0); /* 钳住I2C总线,准备发送或接收数据 */
iic_delay();
}
/**
* @brief 产生IIC停止信号
* @param 无
* @retval 无
*/
//停止信号:SCL 为高电平时,SDA 由低电平向高电平跳变。
void iic_stop(void)
{
IIC_SDA(0); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SDA(1); /* 发送I2C总线结束信号 */
iic_delay();
}
//应答信号:接收到 IC 数据后,向 IC 发出特定的低电平脉冲表示已接收到数据。
/**
* @brief 等待应答信号到来
* @param 无
* @retval 1,接收应答失败
* 0,接收应答成功
*/
uint8_t iic_wait_ack(void)
{
uint8_t waittime = 0;
uint8_t rack = 0;
IIC_SDA(1); /* 主机释放SDA线(此时外部器件可以拉低SDA线) */
iic_delay();
IIC_SCL(1); /* SCL=1, 此时从机可以返回ACK */
iic_delay();
while (IIC_READ_SDA) /* 等待应答 */
{
waittime++;
if (waittime > 250)
{
iic_stop();
rack = 1;
break;
}
}
IIC_SCL(0); /* SCL=0, 结束ACK检查 */
iic_delay();
return rack;
}
/**
* @brief 产生ACK应答
* @param 无
* @retval 无
*/
void iic_ack(void)
{
IIC_SDA(0); /* SCL 0 -> 1 时 SDA = 0,表示应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
IIC_SDA(1); /* 主机释放SDA线 */
iic_delay();
}
/**
* @brief 不产生ACK应答
* @param 无
* @retval 无
*/
void iic_nack(void)
{
IIC_SDA(1); /* SCL 0 -> 1 时 SDA = 1,表示不应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
}
/**
* @brief IIC发送一个字节
* @param data: 要发送的数据
* @retval 无
*/
void iic_send_byte(uint8_t data)
{
uint8_t t;
for (t = 0; t < 8; t++)
{
IIC_SDA((data & 0x80) >> 7); /* 高位先发送 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
data <<= 1; /* 左移1位,用于下一次发送 */
}
IIC_SDA(1); /* 发送完成, 主机释放SDA线 */
}
/**
* @brief IIC读取一个字节
* @param ack: ack=1时,发送ack; ack=0时,发送nack
* @retval 接收到的数据
*/
uint8_t iic_read_byte(uint8_t ack)
{
uint8_t i, receive = 0;
for (i = 0; i < 8; i++ ) /* 接收1个字节数据 */
{
receive <<= 1; /* 高位先输出,所以先收到的数据位要左移 */
IIC_SCL(1);
iic_delay();
if (IIC_READ_SDA)
{
receive++;
}
IIC_SCL(0);
iic_delay();
}
if (!ack)
{
iic_nack(); /* 发送nACK */
}
else
{
iic_ack(); /* 发送ACK */
}
return receive;
}
8.2myiic.h
#ifndef __MYIIC_H
#define __MYIIC_H
#include "./SYSTEM/sys/sys.h"
//1) 使能 IIC 的 SCL 和 SDA 对应的 GPIO 时钟。
//本实验中 IIC 使用的 SCL 和 SDA 分别是 PB8 和 PB9,因此需要先使能 GPIOB 的时钟
/******************************************************************************************/
/* 引脚 定义 */
#define IIC_SCL_GPIO_PORT GPIOB
#define IIC_SCL_GPIO_PIN GPIO_PIN_8
#define IIC_SCL_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define IIC_SDA_GPIO_PORT GPIOB
#define IIC_SDA_GPIO_PIN GPIO_PIN_9
#define IIC_SDA_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
/******************************************************************************************/
/* IO操作 */
#define IIC_SCL(x) do{ x ? \
HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SCL */
#define IIC_SDA(x) do{ x ? \
HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* SDA */
#define IIC_READ_SDA HAL_GPIO_ReadPin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN) /* 读取SDA */
/* IIC所有操作函数 */
void iic_init(void); /* 初始化IIC的IO口 */
void iic_start(void); /* 发送IIC开始信号 */
void iic_stop(void); /* 发送IIC停止信号 */
void iic_ack(void); /* IIC发送ACK信号 */
void iic_nack(void); /* IIC不发送ACK信号 */
uint8_t iic_wait_ack(void); /* IIC等待ACK信号 */
void iic_send_byte(uint8_t txd);/* IIC发送一个字节 */
uint8_t iic_read_byte(unsigned char ack);/* IIC读取一个字节 */
#endif
8.3 24cxx.c
#include "./BSP/IIC/myiic.h"
#include "./BSP/24CXX/24cxx.h"
#include "./SYSTEM/delay/delay.h"
/**
* @brief 初始化IIC接口
* @param 无
* @retval 无
*/
void at24cxx_init(void)
{
iic_init();
}
/**
* @brief 在AT24CXX指定地址读出一个数据
* @param readaddr: 开始读数的地址
* @retval 读到的数据
*/
uint8_t at24cxx_read_one_byte(uint16_t addr)
{
uint8_t temp = 0;
iic_start(); /* 发送起始信号 */
/* 根据不同的24CXX型号, 发送高位地址
* 1, 24C16以上的型号, 分2个字节发送地址
* 2, 24C16及以下的型号, 分1个低字节地址 + 占用器件地址的bit1~bit3位 用于表示高位地址, 最多11位地址
* 对于24C01/02, 其器件地址格式(8bit)为: 1 0 1 0 A2 A1 A0 R/W
* 对于24C04, 其器件地址格式(8bit)为: 1 0 1 0 A2 A1 a8 R/W
* 对于24C08, 其器件地址格式(8bit)为: 1 0 1 0 A2 a9 a8 R/W
* 对于24C16, 其器件地址格式(8bit)为: 1 0 1 0 a10 a9 a8 R/W
* R/W : 读/写控制位 0,表示写; 1,表示读;
* A0/A1/A2 : 对应器件的1,2,3引脚(只有24C01/02/04/8有这些脚)
* a8/a9/a10: 对应存储整列的高位地址, 11bit地址最多可以表示2048个位置, 可以寻址24C16及以内的型号
*/
if (EE_TYPE > AT24C16) /* 24C16以上的型号, 分2个字节发送地址 */
{
iic_send_byte(0xA0); /* 发送写命令, IIC规定最低位是0, 表示写入 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr >> 8); /* 发送高字节地址 */
}
else
{
iic_send_byte(0xA0 + ((addr >> 8) << 1)); /* 发送器件 0xA0 + 高位a8/a9/a10地址,写数据 */
}
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr % 256); /* 发送低位地址 */
iic_wait_ack(); /* 等待ACK, 此时地址发送完成了 */
iic_start(); /* 重新发送起始信号 */
iic_send_byte(0xA1); /* 进入接收模式, IIC规定最低位是1, 表示读取 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
temp = iic_read_byte(0); /* 接收一个字节数据 */
iic_stop(); /* 产生一个停止条件 */
return temp;
}
/**
* @brief 在AT24CXX指定地址写入一个数据
* @param addr: 写入数据的目的地址
* @param data: 要写入的数据
* @retval 无
*/
void at24cxx_write_one_byte(uint16_t addr, uint8_t data)
{
/* 原理说明见:at24cxx_read_one_byte函数, 本函数完全类似 */
iic_start(); /* 发送起始信号 */
if (EE_TYPE > AT24C16) /* 24C16以上的型号, 分2个字节发送地址 */
{
iic_send_byte(0xA0); /* 发送写命令, IIC规定最低位是0, 表示写入 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr >> 8); /* 发送高字节地址 */
}
else
{
iic_send_byte(0xA0 + ((addr >> 8) << 1)); /* 发送器件 0xA0 + 高位a8/a9/a10地址,写数据 */
}
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr % 256); /* 发送低位地址 */
iic_wait_ack(); /* 等待ACK, 此时地址发送完成了 */
/* 因为写数据的时候,不需要进入接收模式了,所以这里不用重新发送起始信号了 */
iic_send_byte(data); /* 发送1字节 */
iic_wait_ack(); /* 等待ACK */
iic_stop(); /* 产生一个停止条件 */
delay_ms(10); /* 注意: EEPROM 写入比较慢,必须等到10ms后再写下一个字节 */
}
/**
* @brief 检查AT24CXX是否正常
* @note 检测原理: 在器件的末地址写如0X55, 然后再读取, 如果读取值为0X55
* 则表示检测正常. 否则,则表示检测失败.
*
* @param 无
* @retval 检测结果
* 0: 检测成功
* 1: 检测失败
*/
uint8_t at24cxx_check(void)
{
uint8_t temp;
uint16_t addr = EE_TYPE;
temp = at24cxx_read_one_byte(addr); /* 避免每次开机都写AT24CXX */
if (temp == 0x55) /* 读取数据正常 */
{
return 0;
}
else /* 排除第一次初始化的情况 */
{
at24cxx_write_one_byte(addr, 0x55); /* 先写入数据 */
temp = at24cxx_read_one_byte(255); /* 再读取数据 */
if (temp == 0x55)return 0;
}
return 1;
}
/**
* @brief 在AT24CXX里面的指定地址开始读出指定个数的数据
* @param addr : 开始读出的地址 对24c02为0~255
* @param pbuf : 数据数组首地址
* @param datalen : 要读出数据的个数
* @retval 无
*/
void at24cxx_read(uint16_t addr, uint8_t *pbuf, uint16_t datalen)
{
while (datalen--)
{
*pbuf++ = at24cxx_read_one_byte(addr++);
}
}
/**
* @brief 在AT24CXX里面的指定地址开始写入指定个数的数据
* @param addr : 开始写入的地址 对24c02为0~255
* @param pbuf : 数据数组首地址
* @param datalen : 要写入数据的个数
* @retval 无
*/
void at24cxx_write(uint16_t addr, uint8_t *pbuf, uint16_t datalen)
{
while (datalen--)
{
at24cxx_write_one_byte(addr, *pbuf);
addr++;
pbuf++;
}
}
8.3 24cxx.h
#ifndef __24CXX_H
#define __24CXX_H
#include "./SYSTEM/sys/sys.h"
#define AT24C01 127
#define AT24C02 255
#define AT24C04 511
#define AT24C08 1023
#define AT24C16 2047
#define AT24C32 4095
#define AT24C64 8191
#define AT24C128 16383
#define AT24C256 32767
/* 开发板使用的是24c02,所以定义EE_TYPE为AT24C02 */
#define EE_TYPE AT24C02
void at24cxx_init(void); /* 初始化IIC */
uint8_t at24cxx_check(void); /* 检查器件 */
uint8_t at24cxx_read_one_byte(uint16_t addr); /* 指定地址读取一个字节 */
void at24cxx_write_one_byte(uint16_t addr,uint8_t data); /* 指定地址写入一个字节 */
void at24cxx_write(uint16_t addr, uint8_t *pbuf, uint16_t datalen); /* 从指定地址开始写入指定长度的数据 */
void at24cxx_read(uint16_t addr, uint8_t *pbuf, uint16_t datalen); /* 从指定地址开始读出指定长度的数据 */
#endif
8.3 main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./USMART/usmart.h"
#include "./BSP/KEY/key.h"
#include "./BSP/24CXX/24cxx.h"
/* 要写入到24c02的字符串数组 */
const uint8_t g_text_buf[] = {"STM32 IIC TEST"};
#define TEXT_SIZE sizeof(g_text_buf) /* TEXT字符串长度 */
int main(void)
{
uint8_t key;
uint16_t i = 0;
uint8_t datatemp[TEXT_SIZE];
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(84); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
at24cxx_init(); /* 初始化24CXX */
lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "IIC TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, "KEY1:Write KEY0:Read", RED); /* 显示提示信息 */
while (at24cxx_check()) /* 检测不到24c02 */
{
lcd_show_string(30, 130, 200, 16, 16, "24C02 Check Failed!", RED);
delay_ms(500);
lcd_show_string(30, 130, 200, 16, 16, "Please Check! ", RED);
delay_ms(500);
LED0_TOGGLE(); /* 红灯闪烁 */
}
lcd_show_string(30, 130, 200, 16, 16, "24C02 Ready!", RED);
while (1)
{
key = key_scan(0);
if (key == KEY1_PRES) /* KEY1按下,写入24C02 */
{
lcd_fill(0, 150, 239, 319, WHITE); /* 清除半屏 */
lcd_show_string(30, 150, 200, 16, 16, "Start Write 24C02....", BLUE);
at24cxx_write(0, (uint8_t *)g_text_buf, TEXT_SIZE);
lcd_show_string(30, 150, 200, 16, 16, "24C02 Write Finished!", BLUE); /* 提示传送完成 */
}
if (key == KEY0_PRES) /* KEY0按下,读取字符串并显示 */
{
lcd_show_string(30, 150, 200, 16, 16, "Start Read 24C02.... ", BLUE);
at24cxx_read(0, datatemp, TEXT_SIZE);
lcd_show_string(30, 150, 200, 16, 16, "The Data Readed Is: ", BLUE); /* 提示传送完成 */
lcd_show_string(30, 170, 200, 16, 16, (char *)datatemp, BLUE); /* 显示读到的字符串 */
}
i++;
if (i == 20)
{
LED0_TOGGLE(); /* 红灯闪烁 */
i = 0;
}
delay_ms(10);
}
}