舱驾一体(1)
1. 背景
在传统分布式架构阶段,智驾和智舱两大系统分别有各自的传感器和控制器。如智舱着重与车内环境监控,智驾着重于车外环境监控。在这种架构下,两套系统是无法真正做到数据同步处理,也无法真正实现同样的安全性要求的,也无法形成真正的数据闭环和控制融合。
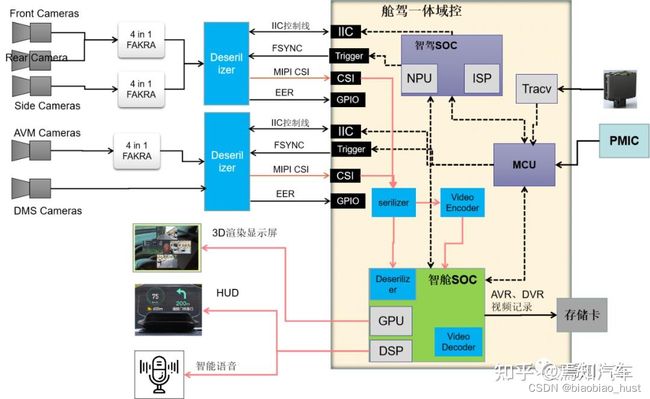
而随着电子电气架构继续向跨域融合演进,智能座舱芯片算力同步提升,这些主机厂紧跟大算力芯片带来的舱驾融合热度,其研发重点正在从原来的行泊一体向舱驾一体进阶。所谓舱驾一体,就是将座舱域和智驾域集成到一个高性能计算单元中,同时支持智能驾驶和智能座舱功能,参照当前比较典型的设计用例就是将座舱域芯片+驾驶域芯片+高效的CPU进行集成的舱驾一体化域控。实际上,舱驾融合可以说是真正的跨域融合,也是电子电气架构进一步向中央集成式迈进的关键一步,同时也符合降本增效的行业趋势。
五大功能域之间开始尝试进行跨域融合,虽然不同的主机厂有不同的理解和做法,但大体思路是一致的,即先将部分域的功能集成到一个高性能计算单元内,再逐渐聚合更多的功能域,最终实现1个中央计算大脑的目标。

2. 机遇与挑战
2.1 软件设计
优势:在集中式架构中,座舱域控制器和驾驶域控制器都被集成在一个中央控制单元中。从软件角度来看,由于“舱驾一体化”集成系统所驱动的整体软件架构迭代,可以获得更多的功能或者更好的功能体验。然而,这需要单独适配软件应用中心的中央控制单元负责整个车辆系统的控制和协调。
挑战:集中式智驾和智舱域控需要解决在智能系统控制中不同软件开发平台的兼容性问题。因为,对于智舱域来说,操作系统是基于QNX或Andriod语言编写的,而智驾域的操作系统大多基于Linux或C++语言。如果是在域控中不同的芯片上部署不同的操作系统,其运行策略就需要考虑如何设计相应的调度接口来满足其两种系统下的应用程序调度和通信。
可以说,上层生态的迁移以及软件适配的复杂度和难度将随着智能驾驶域和座舱域融合度的增加而显着增加,开发成本也会增加。

2.2 硬件设计
优势:从硬件角度看,“座驾一体化”可以提高传感器、芯片等硬件的复用率,降低成本。无论是采用一盒、一板还是一芯片方案,相比目前智能驾驶领域和座舱领域的两盒两芯片方案,在硬件方面都可以很好的减少域控和芯片的投入,同时也可以减少域之间的线束数量。通过将智能座舱和智能驾驶的功能集成在一个中央控制单元中,减少了电气线束和接口的数量,简化系统架构。可以说集中式架构可以降低系统的复杂性和维护成本。
挑战:然而,舱驾一体芯片设计面临着较大的挑战,例如设计复杂度、功耗、散热等问题。以功耗为例,单就智驾域控而言,为了满足其功耗和散热的要求,其要求的芯片制程就已经开始向下探到接近于14nm甚至7nm了。而再加上智舱芯片,特别是在图形渲染上也会占用大量的运算资源。两者结合起来,对于芯片选型要求就更高了。
2.3 数据传输及处理
优势:通过一个芯片实现座舱控制和驾驶控制的整合,可以提供更高度的系统一致性、响应性和实时性。集中式架构通过内部网络传输各个子系统的数据。智能座舱域控制器和智能驾驶域控制器之间可以通过高速数据总线或以太网等方式进行数据交互和共享。
挑战:智驾和智舱对数据传输介质和标准规格上不同。举个例子,对于视频处理这一常规的处理而言,智驾系统需要接入的视频格式要求通常是像RGB这类原始视频,且要求帧率一般较低。因此,在视频传输介质选型上,智驾系统通常会选择MIPI或者PCIe这类并行效率高,且较为稳定的介质。另一方面的,对智舱而言,则更加倾于传输方便于压缩传输的原始视频流(如YUV),或者是对原始视频流进行压缩处理后的HEVC/H.264视频。且智舱对于显示效果会更加倾向于还原实际场景,这样就必然要求其帧率也是足够高,比如流媒体视频就是个典型的例子。
那么问题就来了,如果是既用于智驾又用于智舱的视频将如何在同一个域控中被处理,比如部分视频抽帧,视频时间同步等问题就就会对舱驾一体域控的数据传输及处理能力提出新的要求。
2.4 系统一致性
优势:由于座舱和驾驶都由同一个中央控制单元控制,因此系统的一致性和兼容性会得到更好的保证。可以更高效地处理各种输入数据并做出相应的决策和控制,实现较好的实时性和响应性控制。
挑战:由于智驾与智舱所处理的是不同的功能模块,一个偏驾驶性控制,另一个偏交互性控制,两者无论是在功能安全还是信息安全上都有着完全不同的需求。此外,集中式架构可能存在单点故障风险,即如果中央控制单元发生故障,整个系统都会受到影响。此外,可能面临处理大量数据安全的挑战,需要考虑处理能力限制、数据传输的带宽限制、以及数据入侵风险可能导致的全盘崩塌。
2.5 其他
舱驾一体化需要逐步打通智能驾驶域与座舱域之间的部门围墙,推动组织架构一体化以提高效率。同时还要充分考虑如下一些要素的配合才行。
同时,除开考虑芯片本身的性能外,还要综合考虑芯片外围生态,相关芯片的开发工具链,各芯片相互之间的适配性的要素,软件模块之间调用和通信关系等。
3. 结论
在实际设计中,短期内舱驾一体域控难以实现平台化、标准化、规模化。为了可以更好地协同工作,需要实现更高级别的软硬件模块整合。同时,需要综合考虑系统的可靠性、性能和复杂性等因素来选择合适的架构。
未来随着智能驾驶技术的普及,智能座舱所能发挥的空间也就越大,舱驾一体化逐渐成为发展趋势,终极目标是将座舱域、智驾域、动力域、底盘域、车身域进行跨域大融合。而实现这一目标的前提是先做分布式融合后建立一定的局部跨域融合处理,即先将部分域的功能集成到一个高性能计算单元内,再逐渐聚合更多的功能域。随着大算力芯片的研发落地,后续的舱驾一体甚至是整车一体化控制都会逐步实现。