ARM-Linux驱动内核(S3C2440)
Linux启动流程
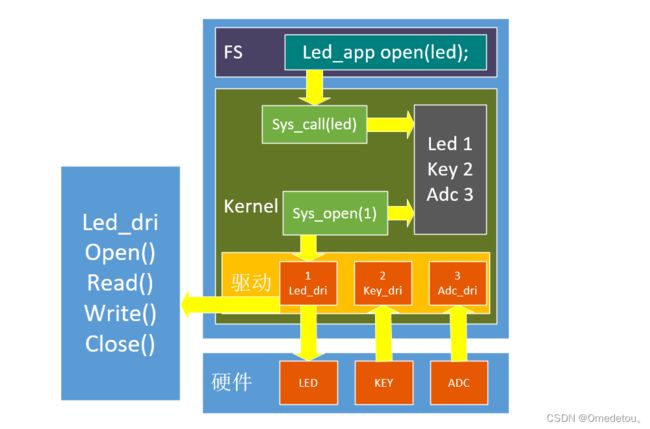
驱动(程序) : 驱使设备行动的程序
1. 启动bootloader---引导操作系统启动的(裸机)程序,为操作系统启动准备环境,并引导操作系统启动
2. 启动kernel---操作系统核心 (俗称的操作系统)
3. 加载根文件系统---一堆文件的集合(根目录下的文件)

| 存储分类 | ||||
|---|---|---|---|---|
| RAM(随机存储) |
SRAM
静态
|
DRAM 动态 |
SDRAM 同步动态 |
SDR(DDR2\3\4\5) |
| ROM(只读存储) |
PROM
可编程
|
EPROM 可擦除 |
EEPROM 电子可擦除 |
Flash : 是RAM和ROM的结合体。具有速度快,掉电不丢失的特点
Norflash : 可线性访问 (和内存访问方式相同)
Nandflash :不可线性访问 (需要专门的软件访问)
地址相关代码:运行地址(加载地址)和链接地址必须保持一致
地址无关代码:运行地址(加载地址)和链接地址可以不同
长跳转(绝对跳转): 目标函数的跳转地址是固定的(绝对位置)
短跳转(相对跳转): 目标函数的跳转地址是可变的(相对位置)
|
Bootloader :一个裸机程序
|
Kernel :一个复杂的程序
|
根文件系统:一堆文件的集合
|
|
uboot ------ booloader
初始 CPU( 工作模式 )
初始化异常向量表
初始化栈
初始化时钟
初始化内存
关看门狗
关闭 Cache
初始相关外设
集成相关的协议
搬移 kernel 到内存
向内核传参 ( 根文件系统类型 / 位
置 /init 进程 / 内核启动阶段使用
ip/ 调试串口 )
引导 kernel 启动 ( 设置 PC ) —
(bootloader 从此不再控制 cpu
cpu 的控制权彻底移交 kernel)
|
内存管理
文件管理
进程管理
网络管理
设备管理
启动到最后阶段时加载 ( 挂载的
形式 ) 根文件系统
先启动 init 进程 - > shell -> app
|
配置文件
系统命令 ( 程序 )
库文件 ( 动 / 静态库 )
用户程序
普通文件 ( 文本 /mp3/ 图片 )
|
Tftp:简单文件传输协议 将uImage拷贝到tftp服务目录下
Nfs:网络文件系统 将rootfs.tar.gz拷贝到nfs服务目录下,并加sudo解压
程序编译的过程:
预处理 编译 汇编 链接
main.c main.i main.s main.o mainapp
fun.c fun.o
gcc main.c fun.o -o mainapp
库:xxx.o的集合---归并
静态库 :会被编译进可执行程序 , 程序执行时不需要库文件
动态库 :不会被编译进可执行程序 , 程序执行时需要库文件 (编译和运行都需要库文件的存在)
动态库生成: gcc -fPIC -shared fun.c -o libfun.so
静态库生成: gcc -c fun.c -o fun.o
ar -rcv libfun.a fun.o
Uboot启动:
Norflash:NORFLASH被接在0地址处,系统上电后PC默认指向0地址,直接运行norflash中的uboot
Nandflash: 系统上电后自动搬移 uboot 的前 4KB 的程序到 IRAM 中 (IRAM 的起始地址 0x40000000 ,大小 4KB) ,此时 PC(0 地址 ) 被映射到0x40000000 地址处, uboot 必须在前 4KB 程序中完成内存的初始化,并将自己剩余的部分搬移到内存继续执行。
Kernel:
Nandflash : uboot 直接搬移 nandflash 中的 uImage 到内存的 0x30008000 地址处,启动内核
远程主机(ubuntu): uboot通过tftp将ubuntu中的uImage下载到内存的0x30008000地址处,启动内核
Rootfs:
Nandflash : 内核启动到最后阶段时直接挂载到 nandflash 上
远程主机(ubuntu): 通过nfs挂载到ubuntu中的nfs目录下
内核编译:
选择模块进行编译------条件编译
Kconfig 定义 make menuconfig 中的配置选项
make menuconfig 可视化界面配置.config中的宏(内核活地图)
.config 保存内核的配置(保存的是选择条件的值)
Makefile:根据 .config 文件中的宏的值进行编译
同层目录下 Kconfig 和 makefile 总是成对出现
动态加载驱动模块:
编译内核模块:
1. 配置 make menuconfig 模块编译选项为M (Kconfig 中类型定义为 tristate)
2. make uImage (如果原来该模块为 y,则需要重新编译出不包含该模块的内核)------非必要
3. make modules 编译内核模块 在源文件同层目录下生成同名的内核模块 xxx.ko
4. 将编译生成的 xxx.ko 拷贝到目标平台
动态加载:
1. insmod led.ko 动态加载内核模块(类似于windows下安装一个新的驱动)
2. lsmod 查看动态加载的驱动模块
3. rmmod led 卸载动态加载的驱动模块
ADC模块驱动编译
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define MAJOR_NUM 251
#define MINOR_NUM 0
#define DEV_NAME "adc"
#define ADCCON 0x58000000
#define ADCDAT0 0x5800000C
#define CLKCON 0x4C00000C
static volatile unsigned long * adccon;
static volatile unsigned long * adcdat0;
static volatile unsigned long * clkcon;
static wait_queue_head_t wq;
static unsigned int condition = 0;
static irqreturn_t irq_handler(int num, void * arg)
{
printk("irq_handler num = %d\n", num);
condition = 1;
wake_up_interruptible(&wq);
return IRQ_HANDLED;
}
static int init_adc(void)
{
*adccon = (1 << 14) | (49 << 6);
return 0;
}
static int adc_start(void)
{
*adccon |= (1 << 0);
return 0;
}
static unsigned short adc_read(void)
{
unsigned short adc_value = *adcdat0 & 0x3ff;
return adc_value;
}
static int open(struct inode * node, struct file * file)
{
init_adc();
printk("adc open ...\n");
return 0;
}
static ssize_t read(struct file * file, char __user * buf, size_t len, loff_t * loff)
{
unsigned short data = 0;
printk("adc read start ...\n");
condition = 0;
adc_start();
wait_event_interruptible(wq, condition);
data = adc_read();
copy_to_user(buf, &data, sizeof(data));
printk("adc read end ...\n");
return sizeof(data);
}
static ssize_t write(struct file * file, const char __user * buf, size_t len, loff_t * loff)
{
return 0;
}
static int close(struct inode * node, struct file * file)
{
printk("adc close ...\n");
return 0;
}
static struct file_operations fops =
{
.owner = THIS_MODULE,
.open = open,
.read = read,
.write = write,
.release = close
};
static struct miscdevice misc_dev =
{
.minor = MISC_DYNAMIC_MINOR,
.name = DEV_NAME,
.fops = &fops
};
static int __init adc_init(void)
{
int ret = 0;
ret = misc_register(&misc_dev);
if(ret < 0)
goto err;
ret = request_irq(IRQ_ADC, irq_handler, IRQF_DISABLED, "irq_adc", NULL);
if(ret < 0)
goto err_irq;
init_waitqueue_head(&wq);
adccon = ioremap(ADCCON, sizeof(adccon));
adcdat0 = ioremap(ADCDAT0, sizeof(adcdat0));
clkcon = ioremap(CLKCON, sizeof(clkcon));
*clkcon |= (1 << 15);
printk("CLKCON = %lx\n", *clkcon);
printk("adc_init ###############################\n");
return 0;
err:
misc_deregister(&misc_dev);
printk("adc cdev_add failed ret = %d\n", ret);
return ret;
err_irq:
disable_irq(IRQ_ADC);
free_irq(IRQ_ADC, NULL);
misc_deregister(&misc_dev);
printk("adc cdev_add failed ret = %d\n", ret);
return ret;
}
static void __exit adc_exit(void)
{
iounmap(clkcon);
iounmap(adcdat0);
iounmap(adccon);
disable_irq(IRQ_ADC);
free_irq(IRQ_ADC, NULL);
misc_deregister(&misc_dev);
printk("adc_exit ###############################\n");
}
module_init(adc_init);
module_exit(adc_exit);
MODULE_LICENSE("GPL");