机器人履带底盘的悬挂和传动
“我爸是坦克!”
—— 一个履带机器人
一. 前言
曾经调研过机器人履带底盘的设计和构造,整理一下备忘。
本文主要关注自己比较难理解的履带底盘悬挂机构和摇臂式履带底盘传动机构。其中履带底盘的悬挂涉及到克里斯蒂悬挂(Christie suspension)和马蒂尔达四轮平衡悬挂(Mathilda four wheel balance suspension),是机构构型的介绍。摇臂式底盘传动主要通过实例介绍一下其紧凑的机械设计,实现“看似在一根轴上”而同时实现履带主运动和摇臂辅助运动。
所涉内容都是基于公开的产品资料、专利公布文件、博客网页等,只是整理加自己的理解。
二. 机器人履带底盘的悬挂
机器人履带底盘的悬挂一般是指在履带轮与机器人本体用于传递作用力、吸收冲击的装置。
机器人履带底盘的机构设计会参考坦克车的底盘设计,坦克车的悬挂主要有三种:克里斯蒂悬挂、平衡式悬挂、扭杆式悬挂,其中扭杆式悬挂依靠结构件的弹性变形提供弹簧力不适用于小型轻载的机器人底盘。比较流行的国产机器人履带底盘在产品介绍中一般都提到两种悬挂,即克里斯蒂悬挂和马蒂尔达四轮平衡悬挂,可以同时使用也可以单独使用。
所谓克里斯蒂悬挂,查阅 Wikipedia [1] 可知:“Christie suspension as used in his 1931 patent: When the roadwheel (3) is pushed up by an obstacle, the arm (1) it is mounted on is pushed upwards, pivoting around the mounting point where it is attached to the hull. That movement compresses the spring (2), pushing the arm down again.” (如图 1 所示)

类似于这种支点-摆臂-弹簧结构的悬挂都可以称为克里斯蒂悬挂,该悬挂是一种独立悬挂。而马蒂尔达四轮平衡悬挂 [2] 是一种非独立悬挂,多个负重轮使用同一组支撑架和弹性元件,原理上有点像加了弹簧的跷跷板,这种平衡式悬挂的作用是使得行驶平稳,如图 2 所示。
我们以山东国兴智能的专利公开文件 [3] 为例,看看这两种悬挂用在机器人履带底盘上是如何应用的?其中接近轮组和离去轮组中,为了增加底盘的通过性使用了克里斯蒂悬挂;承重轮组部分为了更好地适应不平的地面、均衡各个承重轮的受力、使得行驶更平稳使用了马蒂尔达四轮平衡悬挂。(如图 3 所示)
机器人履带底盘的悬挂主要介绍以上内容,下面我们再看一下摇臂式履带机器人底盘的传动。重点在于,紧凑设计下,同时实现履带式移动的主运动和摇臂式的辅助运动。
三. 机器人履带底盘的传动
摇臂式履带机器人底盘在可通过性(尤其越障能力)方面是各类机器人履带底盘中的佼佼者。RoboteX 公司的 AVATAR Tactical Robot [4] 就是该类型底盘,如图 4 所示。机器人履带底盘通过左右两侧履带运动的差速控制实现前进后退、左右转弯(甚至原地旋转)。摇臂式履带底盘利用前后两组摇臂各自的俯仰运动实现履带运动对不同地形的适应,比如摇臂上履带先搭上较高的台阶边缘,以实现攀爬。两侧履带差速运动是主运动,摇臂俯仰运动是辅助运动。

主运动功能有 2 个自由度,每侧各一个独立自由度,如图 5 所示。同侧履带同向同速运动,异侧履带速度差异就是所谓的差速。每一侧都有一个主运动履带和前后两个摇臂上各一个履带,无论摇臂如何摆动,同侧三根履带的运动是一致的。

机动辅助运动,就是前后两组摇臂各自的俯仰运动,如图 6 所示。每排各一个自由度,共2 个自由度,同排的左右两个摆臂同向同速摆动,而且摇臂的摆臂运动不受摇臂上履带运动的影响。

4 个自由度意味 4 个电机进行驱动控制,需要布置得很紧凑,另外看产品图片(图 4),主运动和机动辅助运动的输出轴好像是公用的。怎么实现的呢?找一下RoboteX 公开的专利 [5] ,自己理解如下。
底盘主体就是三个仓组成的,分别是前后两个驱动组合仓+中间一个电池仓,如图 6 所示。

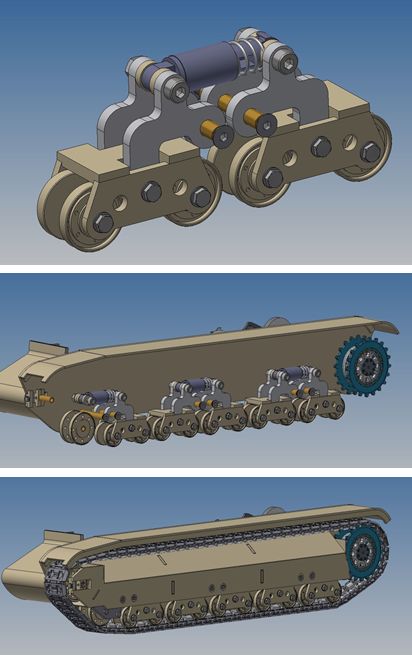
主运动和机动辅助运动的传动看起来比较复杂也很巧妙,如图 7 和 图 8 所示。
中科院沈阳自动化研究所早在2004就申请类似的“轮-腿-履带复合移动机构” [6] ,如图 9 所示。原理上差不多,沈自所的还多了轮子的传动,可以通过摆动腿的摆动来切主履带行走、轮子行走、拍动腿履带行走,所以更复杂。

四. 小结
履带底盘看似简单,其实还是蛮复杂的,“人家老爸是坦克”。
实际上,我也没做过,只是对其原理上感兴趣,所以记录一下。
参考文献
[1] Christie suspension (https://en.wikipedia.org/wiki/Christie_suspension)
[2] Queen of the desert - Infantry Tank Mk.II “Matilda” - Scratch built (https://www.rcuniverse.com/forum/rc-tanks-369/11636981-queen-desert-infantry-tank-mk-ii-%93matilda%94-scratch-built.html)
[3] 一种履带底盘用悬挂行走机构,授权公告号:CN206691244U,申请日:2017.04.17
[4] https://robotex.com/products/avatar-tactical-robot/
[5] ROBOTIC SYSTEMAND METHOD OF USE, Patent No.: US 8100205 B2,Date of Patent: Jan. 24, 2012
[6] 具有轮-腿-履带复合移动机构的危险作业机器人,授权公告号:CN100354171C,申请日:2004.6.30