飞桨入门学习
文章目录
-
-
-
-
- 需要引用的库
- 灰度图
-
-
- 屏幕分辨率
- 图像分辨率
-
- 参数1:图片的文件名
- 参数2:读入方式,省略即采用默认值
- 1.通道交换
- 2.灰度化(Grayscale)
- 二值化
- 4. 大津二值化算法(Otsu's Method)
- 5. HSV变换
- 6. 减色处理
- 7. 平均池化(Average Pooling)
- 8. 最大池化(Max Pooling)
- 9. 高斯滤波(Gaussian Filter)
- 10 中值滤波
- 11. 均值滤波器
- 12. Motion Filter
- 13. MAX-MIN滤波器
- 14. 差分滤波器(Differential Filter)
- 16. Prewitt滤波器
- 19. Log滤波器
- 21. 直方图均衡化
- 22. 伽马校正
- 23. 常见的插值方法
- 阈值分割
- 固定阈值分割
- 自适应阈值
- Otsu阈值
- 小结
- 图像几何变换
- 缩放图片
- 翻转图片
- 平移图片
- 绘图功能
- 添加文字
-
需要引用的库
import numpy as np
import cv2
import matplotlib.pyplot as plt
import paddle
from PIL import Image
灰度图
Gray Scale Image 或是Grey Scale Image,又称灰阶图。把白色与黑色之间按对数关系分为若干等级,称为灰度。灰度分为256阶。
用灰度表示的图像称作灰度图。除了常见的卫星图像、航空照片外,许多地球物理观测数据也以灰度表示。
分辨率=画面水平方向的像素值 * 画面垂直方向的像素值
屏幕分辨率
例如,屏幕分辨率是1024×768,也就是说设备屏幕的水平方向上有1024个像素点,垂直方向上有768个像素点。像素的大小是没有固定长度的,不同设备上一个单位像素色块的大小是不一样的。
例如,尺寸面积大小相同的两块屏幕,分辨率大小可以是不一样的,分辨率高的屏幕上面像素点(色块)就多,所以屏幕内可以展示的画面就更细致,单个色块面积更小。而分辨率低的屏幕上像素点(色块)更少,单个像素面积更大,可以显示的画面就没那么细致。
图像分辨率
例如,一张图片分辨率是500x200,也就是说这张图片在屏幕上按1:1放大时,水平方向有500个像素点(色块),垂直方向有200个像素点(色块)。
在同一台设备上,图片分辨率越高,这张图片1:1放大时,图片面积越大;图片分辨率越低,这张图片1:1缩放时,图片面积越小。(可以理解为图片的像素点和屏幕的像素点是一个一个对应的)。
但是,在屏幕上把图片超过100%放大时,为什么图片上像素色块也变的越大,其实是设备通过算法对图像进行了像素补足,我们把图片放的很大后看到的一块一块的方格子,虽然理解为一个图像像素,但是其实是已经补充了很多个屏幕像素;同理,把图片小于100%缩小时,也是通过算法将图片像素进行减少。
使用OpenCV加载并保存图片
加载图片,显示图片,保存图片
OpenCV函数:cv2.imread(), cv2.imshow(), cv2.imwrite()
加载图片
使用cv2.imread()来读入一张图片:
参数1:图片的文件名
如果图片放在当前文件夹下,直接写文件名就行了,如’lena.jpg’
否则需要给出绝对路径,如’D:\OpenCVSamples\lena.jpg’
参数2:读入方式,省略即采用默认值
cv2.IMREAD_COLOR:彩色图,默认值(1)
cv2.IMREAD_GRAYSCALE:灰度图(0)
cv2.IMREAD_UNCHANGED:包含透明通道的彩色图(-1)
height, width, channels = img.shape



1.通道交换
读取图像,然后将RGB通道替换成BGR通道,需要注意的是,opencv读取的图像默认是BGR。cv2.cvtColor函数可以参考Color Space Conversions
img = cv2.imread(‘imori.jpg’)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
cv2.imwrite(‘answer.png’, img)
2.灰度化(Grayscale)
灰度化的计算公式为:
![]()
二值化
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, img = cv2.threshold(img, 128, 255, cv2.THRESH_BINARY)
4. 大津二值化算法(Otsu’s Method)
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, img = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU)
5. HSV变换
5. HSV变换
img = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
进行色相反转
img[:, :, 0] = (img[:, :, 0] + 180) % 360
img = cv2.cvtColor(img, cv2.COLOR_HSV2BGR)
6. 减色处理
img = img // 64 * 64 + 32
7. 平均池化(Average Pooling)
img = skimage.measure.block_reduce(img, (8, 8, 1), np.mean)
8. 最大池化(Max Pooling)
img = skimage.measure.block_reduce(img, (8, 8, 1), np.max)
9. 高斯滤波(Gaussian Filter)
img = cv2.GaussianBlur(img, (3, 3), 1.3)
10 中值滤波
img = cv2.medianBlur(img, 3)
11. 均值滤波器
img = cv2.blur(img, (3, 3))
12. Motion Filter
生成一个对角线方向的卷积核(kernel)
kernel = np.diag([1]*3) / 3
img = cv2.filter2D(img, -1, kernel)
13. MAX-MIN滤波器
MAX-MIN滤波器使用网格内像素的最大值和最小值的差值对网格内像素重新赋值。通常用于边缘检测。
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
kernel = np.ones((3,3))
img_max = cv2.dilate(img, kernel)
img_min = cv2.erode(img, kernel)
img = img_max - img_min
14. 差分滤波器(Differential Filter)
差分滤波器对图像亮度急剧变化的边缘有提取效果,可以获得邻接像素的差值。
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
kernel_y = np.array([[0, -1, 0],[0, 1, 0],[0, 0, 0]])
img_y = cv2.filter2D(img, -1, kernel)
kernel_x = np.array([[0, 0, 0],[-1, 1, -0],[0, 0, 0]])
img_x = cv2.filter2D(img, -1, kernel)
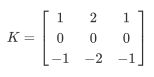
15. Sobel滤波器
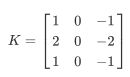
Sobel滤波器可以提取特定方向(纵向或横向)的边缘。sobel滤波器可以参考OpenCV: Image Filtering。滤波器按下式定义:
纵向:
横向:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_x = cv2.Sobel(img, cv2.CV_64F, 1, 0)
img_y = cv2.Sobel(img, cv2.CV_64F, 0, 1)
16. Prewitt滤波器
Prewitt滤波器是用于边缘检测的一种滤波器,其函数可以参考https://docs.scipy.org/doc/scipy/reference/generated/scipy.ndimage.prewitt.html
纵向:
横向:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_x = scipy.ndimage.prewitt(img, 1)
img_y = scipy.ndimage.prewitt(img, 0)
- Laplacian滤波器
Laplacian滤波器是对图像亮度进行二次微分从而检测边缘的滤波器。https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gad78703e4c8fe703d479c1860d76429e6
纵向:
横向:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = cv2.Laplacian(img,cv2.CV_64F)
- Emboss滤波器
Emboss滤波器可以使物体轮廓更加清晰
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
kernel = np.array([[-2, -1, 0], [-1, 1, 1], [0, 1, 2]])
img = cv2.filter2D(img, -1, kernel)
19. Log滤波器
LoG即高斯-拉普拉斯(Laplacian of Gaussian)的缩写,使用高斯滤波器使图像平滑化之后再使用拉普拉斯滤波器使图像的轮廓更加清晰。其函数可以参考https://docs.scipy.org/doc/scipy/reference/generated/scipy.ndimage.gaussian_laplace.html
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = scipy.ndimage.gaussian_laplace(img, sigma=3)
- 直方图绘制
绘制直方图显示不同数值的像素出现的次数。在 Matplotlib 中有 hist() 函数提供绘制直方图的接口。https://matplotlib.org/api/_as_gen/matplotlib.pyplot.hist.html
img = cv2.imread('imori_dark.jpg').astype(np.float)
plt.hist(img.ravel(), bins=255, rwidth=0.8, range=(0, 255))
plt.savefig("answer.png")
21. 直方图均衡化
直方图均衡化是一种增强图像对比度的方法,其主要思想是将一副图像的直方图分布变成近似均匀分布。其参考https://stackoverflow.com/questions/31998428/opencv-python-equalizehist-colored-image
img_yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)
# equalize the histogram of the Y channel
img_yuv[:,:,0] = cv2.equalizeHist(img_yuv[:,:,0])
# convert the YUV image back to RGB format
img_output = cv2.cvtColor(img_yuv, cv2.COLOR_YUV2BGR)
22. 伽马校正
伽马校正用来对照相机等电子设备传感器的非线性转换特性进行校正。如果图像鸳鸯显示在显示器上,画面就会显得很暗。伽马校正通过预先增大RGB值来排除显示器的影响,达到对图像修正的目的。其参考https://stackoverflow.com/questions/33322488/how-to-change-image-illumination-in-opencv-python/41061351
def adjust_gamma(image, gamma=1.0):
invGamma = 1.0 / gamma
table = np.array([((i / 255.0) ** invGamma) * 255
for i in np.arange(0, 256)]).astype("uint8")
return cv2.LUT(image, table)
original = cv2.imread('imori_gamma.jpg')
gamma = 2.2
adjusted = adjust_gamma(original, gamma=gamma)
cv2.imwrite('answer.png', adjusted)
23. 常见的插值方法
包括双三次、双线性、最邻近插值。
img = cv2.imread('imori.jpg')
height, width = img.shape[:2]
new_height, new_width = int(height/2), int(width/2)
# 双三次
new_img = cv2.resize(img, (new_width, new_height), interpolation=cv2.INTER_CUBIC)
# 双线性
new_img = cv2.resize(img, (new_width, new_height), interpolation=cv2.INTER_LINEAR)
# 最邻近
new_img = cv2.resize(img, (new_width, new_height), interpolation=cv2.INTER_NEAREST)
RGB或BGR到灰度(COLOR_RGB2GRAY,COLOR_BGR2GRAY)
RGB或BGR到YcrCb(或YCC)(COLOR_RGB2YCrCb,COLOR_BGR2YCrCb)
RGB或BGR到HSV(COLOR_RGB2HSV,COLOR_BGR2HSV)
RGB或BGR到Luv(COLOR_RGB2Luv,COLOR_BGR2Luv)
灰度到RGB或BGR(COLOR_GRAY2RGB,COLOR_GRAY2BGR)
经验之谈:颜色转换其实是数学运算,如灰度化最常用的是:gray=R0.299+G0.587+B*0.114。
HSV是一个常用于颜色识别的模型,相比BGR更易区分颜色
经验之谈:OpenCV中色调H范围为[0,179],饱和度S是[0,255],明度V是[0,255]。虽然H的理论数值是0°~360°,但8位图像像素点的最大值是255,所以OpenCV中除以了2,某些软件可能使用不同的尺度表示,所以同其他软件混用时,记得归一化。
我们实现一个使用HSV来只显示视频中蓝色物体的例子,步骤如下:
捕获视频中的一帧
从BGR转换到HSV
提取蓝色范围的物体
只显示蓝色物体
阈值分割
使用固定阈值、自适应阈值和Otsu阈值法"二值化"图像
固定阈值分割
固定阈值分割很直接,一句话说就是像素点值大于阈值变成一类值,小于阈值变成另一类值。
cv2.threshold()用来实现阈值分割,ret是return value缩写,代表当前的阈值。函数有4个参数:
参数1:要处理的原图,一般是灰度图
参数2:设定的阈值
参数3:最大阈值,一般为255
参数4:阈值的方式,主要有5种,详情:ThresholdTypes
0: THRESH_BINARY 当前点值大于阈值时,取Maxval,也就是第四个参数,否则设置为0
1: THRESH_BINARY_INV 当前点值大于阈值时,设置为0,否则设置为Maxval
2: THRESH_TRUNC 当前点值大于阈值时,设置为阈值,否则不改变
3: THRESH_TOZERO 当前点值大于阈值时,不改变,否则设置为0
4:THRESH_TOZERO_INV 当前点值大于阈值时,设置为0,否则不改变
OpenCV函数:cv2.threshold(), cv2.adaptiveThreshold()
经验之谈:很多人误以为阈值分割就是二值化。从上图中可以发现,两者并不等同,阈值分割结果是两类值,而不是两个值。
自适应阈值
看得出来固定阈值是在整幅图片上应用一个阈值进行分割,它并不适用于明暗分布不均的图片。 cv2.adaptiveThreshold()自适应阈值会每次取图片的一小部分计算阈值,这样图片不同区域的阈值就不尽相同。它有5个参数,其实很好理解,先看下效果:
参数1:要处理的原图
参数2:最大阈值,一般为255
参数3:小区域阈值的计算方式
ADAPTIVE_THRESH_MEAN_C:小区域内取均值
ADAPTIVE_THRESH_GAUSSIAN_C:小区域内加权求和,权重是个高斯核
参数4:阈值方式(跟前面讲的那5种相同)
参数5:小区域的面积,如11就是11*11的小块
参数6:最终阈值等于小区域计算出的阈值再减去此值
Otsu阈值
在前面固定阈值中,我们是随便选了一个阈值如127,那如何知道我们选的这个阈值效果好不好呢?答案是:不断尝试,所以这种方法在很多文献中都被称为经验阈值。Otsu阈值法就提供了一种自动高效的二值化方法。
小结
- cv2.threshold()用来进行固定阈值分割。固定阈值不适用于光线不均匀的图片,所以用 - - –
- cv2.adaptiveThreshold()进行自适应阈值分割。
二值化跟阈值分割并不等同。针对不同的图片,可以采用不同的阈值方法。
图像几何变换
实现旋转、平移和缩放图片
OpenCV函数:cv2.resize(), cv2.flip(), cv2.warpAffine()
缩放图片
缩放就是调整图片的大小,使用cv2.resize()函数实现缩放。可以按照比例缩放,也可以按照指定的大小缩放: 我们也可以指定缩放方法interpolation,更专业点叫插值方法,默认是INTER_LINEAR,全部可以参考:InterpolationFlags
缩放过程中有五种插值方式:
- cv2.INTER_NEAREST 最近邻插值
- cv2.INTER_LINEAR 线性插值
- cv2.INTER_AREA 基于局部像素的重采样,区域插值
- cv2.INTER_CUBIC 基于邻域4x4像素的三次插值
- cv2.INTER_LANCZOS4 基于8x8像素邻域的Lanczos插值
翻转图片
镜像翻转图片,可以用cv2.flip()函数: 其中,参数2 = 0:垂直翻转(沿x轴),参数2 > 0: 水平翻转(沿y轴),参数2 < 0: 水平垂直翻转。
dst = cv2.flip(img, 1)
plt.imshow(dst)
平移图片
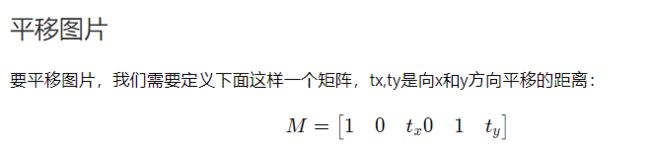
平移是用仿射变换函数cv2.warpAffine()实现的:
# 平移图片
import numpy as np
# 获得图片的高、宽
rows, cols = img.shape[:2]
M = np.float32([[1,0,100],[0,1,500]])
dst = cv2.warpAffine(img,M,(cols,rows))
plt.imshow(dst)
绘图功能
绘图功能
绘制各种几何形状、添加文字
OpenCV函数:cv2.line(), cv2.circle(), cv2.rectangle(), cv2.ellipse(), cv2.putText()
绘制形状的函数有一些共同的参数,提前在此说明一下:
img:要绘制形状的图片
color:绘制的颜色
彩色图就传入BGR的一组值,如蓝色就是(255,0,0)
灰度图,传入一个灰度值就行
thickness:线宽,默认为1;对于矩形/圆之类的封闭形状而言,传入-1表示填充形状
lineType:线的类型。默认情况下,它是8连接的。cv2.LINE_AA 是适合曲线的抗锯齿线。
添加文字
使用cv2.putText()添加文字,它的参数也比较多,同样请对照后面的代码理解这几个参数:
参数2:要添加的文本
参数3:文字的起始坐标(左下角为起点)
参数4:字体
参数5:文字大小(缩放比例)
引用出处
https://aistudio.baidu.com/aistudio/projectdetail/3485483