【Linux驱动】休眠与唤醒 | POLL机制 | 异步通知 | 阻塞与非阻塞 | 软件定时器
作者:一只大喵咪1201
专栏:《Linux驱动》
格言:你只管努力,剩下的交给时间!

目录
- 休眠与唤醒
-
- 内核函数
- 驱动框架及编程
- POLL机制
-
- 驱动编程
- 应用编程
- 异步通知
-
- 驱动编程
- 应用编程
- 阻塞与非阻塞
-
- 应用编程
- 驱动编程
- 定时器
-
- 定时器消抖
- 总结
休眠与唤醒
在前面讲解按键驱动时,本喵提到过休眠唤醒的按键驱动方式:应用程序必须等待按键按下后,才会继续执行,否则则处于阻塞状态。

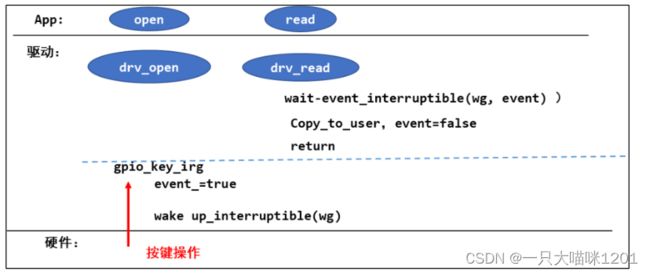
如上图所示应用层APP获取按键值的流程:
- APP调用
read系统调用读取按键数据。 - APP进入内核态,通过文件系统中的
sys_read调用驱动层的drv_read。 - 发现有数据则复制到用户空间并马上返回,如果没有数据则APP休眠,也就是阻塞不动。
驱动中没有数据时,APP在内核态执行到drv_read时会休眠。所谓休眠就是把自己的状态改为非RUNNING,这样内核的调度器就不会让该APP运行了。

如上图,当APP1因为没有按键数据而休眠时,内核会挑选出其他APP去运行,当按下按键后:
- 驱动程序中的中断服务程序被调用,它会记录数据,并唤醒APP1。
- 当APP1再次运行时,就会继续执行
drv_read中剩下的代码,把数据复制回用户空间,然后返回用户空间。
所谓唤醒就是把APP的状态改为RUNNING,这样内核的调度器在合适的时间就会让它运行。
APP1的执行过程如红色实线所示,它被分成了两段:
- 红线所涉及的代码,都是APP1调用的,它都属于APP1的上下文。
- 按键的中断服务程序,不属于APP1的上下文,它属于中断的上下文。
内核函数
休眠函数:
当按键的驱动程序drv_read中没有按键数据时,就需要我们在驱动程序中让当前进程/线程去休眠,此时就需要使用内核提供的一些休眠函数:
| 函数 | 说明 |
|---|---|
| wait_event_interruptible(wq, condition) | 休眠,直到condition为真,休眠期间是可以被信号打断的 |
| wait_event(wq, condition) | 休眠,直到condition为真,退出的唯一条件就是condition为真,信号也无法打断。 |
| wait_event_interruptible_timeout(wq, condition, timeout) | 休眠,直到condition为真或者超时,休眠期间可以被信号打断 |
| wait_event_timeout(wq, condition, timeout) | 休眠,直到condition为真或者超时,信号无法打断。 |
参数说明:
wq:waitqueue,等待队列。- 休眠时除了把程序状态改为非
RUNNING之外,还要把进程/进程放入wq中,以后中断服务程序要从wq中把它取出来唤醒。
- 休眠时除了把程序状态改为非
condition:可以是变量,也可以是任何表达式,表示一直等待,直到condition为真。
唤醒函数:
在按键的中断服务函数中,需要去唤醒处于休眠状态的进程/线程,同样也通过内核提供的唤醒函数:
| 函数 | 说明 |
|---|---|
| wake_up_interruptible(x) | 唤醒 x 队列中状态为TASK_INTERRUPTIBLE的线程,只唤 醒其中的一个线程 |
| wake_up_interruptible_nr(x, nr) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”的线程,只唤 醒其中的 nr 个线程 |
| wake_up_interruptible_all(x) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”的线程,唤醒 其中的所有线程 |
| wake_up(x) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE ”或 “TASK_UNINTERRUPTIBLE”的线程,只唤醒其中的一个线程 |
| wake_up_nr(x, nr) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”或“TASK_UNINTERRUPTIBLE”的线程,只唤醒其中nr个线程 |
| wake_up_all(x) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”或“TASK_UNINTERRUPTIBLE”的线程,唤醒其中的所有线程 |
参数说明:
x:就是前面在休眠时存放非RUNNING状态的线程/进程的队列。TASK_INTERRUPTIBLE:该状态的休眠线程是可以被信号中断休眠的。TASK_UNINTERRUPTIBLE:该状态的休眠线程是不可以被信号中断休眠的。
驱动框架及编程
如上图所示是休眠唤醒的驱动框架,根据该框架,我们需要做这几件事情:
- 初始化
wq队列,使用DECLARE_WAIT_QUEUE_HEAD()宏函数实现。 - 在驱动层的
drv_read中,调用wait_event_interruptible()函数:- 它本身会判断
event参数是否为FALSE,如果为FASLE表示无数据,会将自己放入wq等待队列并休眠。 - 当从
wait_event_interruptible()函数返回后,会继续把数据复制回用户空间。
- 它本身会判断
- 在中断服务程序中,设置
event为TRUE,并且调用wake_up_interruptible唤醒正在队列中休眠的线程/进程。
编程:
下面是在之前本喵实现的按键中断程序的基础上实现休眠唤醒,设备树文件本喵就不再贴图了,有兴趣的小伙伴移步这里。
注册platform_driver结构体对象以及初始化probe和remove等内容和前面的按键中断完全一样,本喵不再讲解。
本喵这里为了防止按键数据丢失,使用环形缓冲区来记录按键数据:

如上图所示环形缓冲区以及操作的接口函数定义,包括判空,判满,写数据和读数据。
- gpio_key_drv_read函数
当应用层使用系统调用read时,最终会调用到file_operations结构体中的read函数,也就是gpio_key_drv_read驱动层读取数据的函数。

如上图代码所示,先使用DECLARE_WAIT_QUEUE_HEAD宏函数初始化等待队列gpio_key_wait。
当调用到驱动层的gpio_key_drv_read函数后,使用wait_event_interruptible函数:
- 如果环形缓冲区是空的,说明没有数据,则将当前线程放入到等待队列中休眠。
- 如果环形缓冲区不是空的,说明有数据,则不将当前线程放入等待队列,而是直接调用获取环形缓冲区中的数据并且拷贝到用户空间中。
如果因为没有数据而处于休眠状态,则该线程就会阻塞到这里,当该线程被唤醒后,说明环形缓冲区中有数据了,则读取数据并且拷贝到用户空间中。
- gpio_key_isr中断服务函数
如果线程因为没有按键数据而休眠了,那么只能在中断服务程序中将其唤醒:
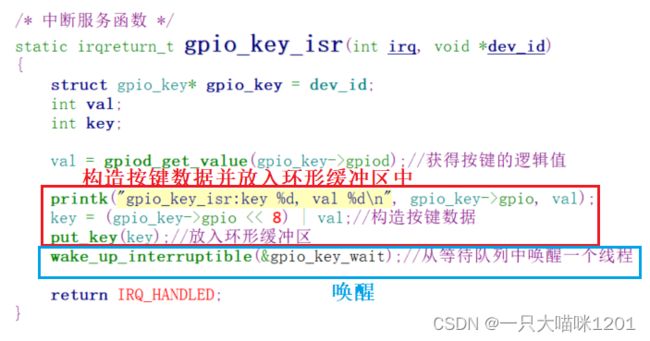
如上图所示中断服务函数,当按键中断产生后,获取GPIO引脚的逻辑值,然后构造出按键值:
- 按键值
key:低八位是GPIO引脚的逻辑值,其余位是描述引脚信息的整数。
再调用wake_up_interruptible从等待队列gpio_key_wait中唤醒因为没有读取到按键数据而休眠的线程。
- 在中断服务函数中向环形缓冲区中写入了按键数据,也就是意味着驱动程序
drv_read中的event:!is_key_buf_empty()变成了TRUE,所以线程就被唤醒了。- 由于
gpio_key_wait是专门用来存放读取按键的线程的,所以目前该等待队列中只有一个线程,中断服务函数不会唤醒错误。
演示:
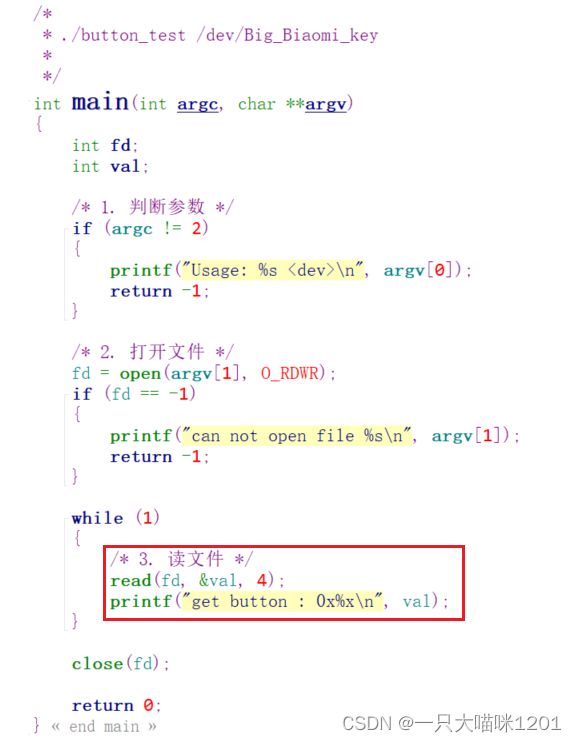
如上图应用层的button_test.c测试代码,在打开按键设备以后,在while死循环中使用read系统调用读取按键数据,如果读取到就打印出来:
- 如果没有按键数据,该进程会阻塞在
read调用处,不会执行下去。 - 当有按键数据时,进程就会继续执行。
将驱动程序和测试程序上传到服务器进行编译,将得到的gpio_key_drv.ko和button_test拷贝到网络文件系统中供开发板使用,本喵这里就不演示具体的步骤了。
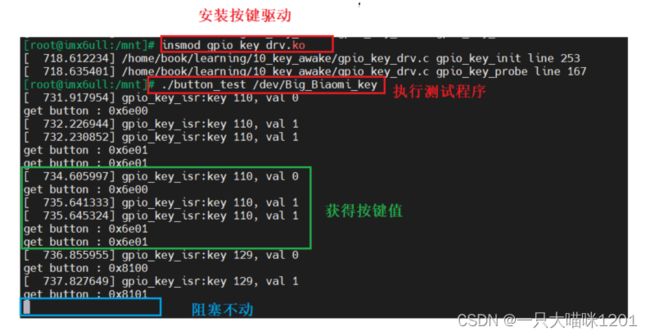
如上图所示,将按键驱动程序安装以后,再运行应用层的测试程序:
- 运行起来后,程序阻塞在
read处,因为没有按键值。 - 按下开发板上的按键后,驱动程序打印出了按键的整数编号和逻辑值。
- 应用程序打印出了我们在驱动程序中构建后的按键值。
POLL机制
休眠唤醒机制的致命缺陷在于,如果没有按键数据,进程/线程就会一直死等下去。而POLL机制就是为了解决这个问题的:
- APP不知道驱动程序中是否有数据,可以先调用
poll函数查询一下,poll函数可以传入超时时间。 - APP进入内核态,调用到驱动程序的
drv_poll函数,如果有数据的话立刻返回。 - 如果发现没有数据时就休眠一段时间。
- 当按下按键时,驱动程序的中断服务程序被调用,它会记录数据并且唤醒APP。
- 当超时时间到了之后,内核也会唤醒APP。
- APP根据
poll函数的返回值就可以知道是否有数据,如果有数据就调用read得到数据。

如上图所示poll机制执行的流程,分为9步:
- APP使用
open系统调用打开按键设备。 - 通过内核文件系统中
sys_open函数调用file_operation结构体中的drv_open驱动函数来打开设备。
每一个设备,内核都会将其看成是一个文件,都会在内核中创建一个struct file结构体来描述这个设备,该结构体就位于内核的文件系统中。
-
APP调用
poll系统调用后进入内核态。 -
内核文件系统中的
sys_poll,会在死循环for中,先调用驱动程序的drv_poll来获取状态event。- 在驱动程序
drv_poll中,要把当前线程挂入到等待队列wq中,否则在唤醒的时候就找不到该线程了。 - 但是驱动程序
drv_poll并不会让当前线程休眠。
- 在驱动程序
-
返回的状态表示当前没有数据,那么内核文件系统就让该线程休眠一会儿。
-
线程休眠过程中,按下了按键,产生了按键中断,在中断服务函数中记录按键值,并且从
wq等待队列中将线程唤醒。 -
线程被唤醒后处于内核文件系统中的
for死循环中,所以还要再执行一次drv_poll驱动程序,获取按键数据的状态。 -
此时获取到的数据状态表示有按键数据,就会从返回到用户态,APP可以继续执行不再阻塞。
-
APP根据
poll的返回值发现有按键数据,则调用read函数读取按键数据。
如果一直没有按键数据,也就是线程在休眠后一直没有被唤醒,此时的流程也是类似的,从第三步开始看:
- APP调用
poll系统调用后进入内核态。 - 导致驱动程序的
drv_poll被调用。 - 假设当前没有数据,则休眠一会。
- 在休眠过程中,一直没有按下了按键,超时时间到了,内核把这个线程唤醒。
- 线程从休眠中被唤醒,继续执行
for循环,再次调用drv_poll驱动程序获取数据状态。 - 此时获取到的数据状态仍然表示没有数据,但是超时时间已经到了,也只能从内核态返回用户态了。
- APP根据
poll的返回值发现没有按键数据,则不能调用read函数读取按键数据。
这个过程中有几点需要注意:
drv_poll要把线程挂入队列wq,但是并不是在drv_poll中进入休眠,而 是在调用drv_poll之后休眠。
drv_poll驱动程序只做两件事情:
- 把线程放入到等待队列
wq中,但是不休眠。- 返回
event事件状态,而不是返回事件值。
- APP调用一次
poll,有可能会导致drv_poll被调用两次:- 进入内核文件系统的
for循环中先调用一次获取状态。 - 被唤醒后(中断或者超时)执行
for循环再调用一次,判断是数据到来还是超时,然后返回用户态。
- 进入内核文件系统的
- APP要判断
poll返回的原因:- 有数据到来,还是超时。有数据到来才能调用
read函数读取按键值。
- 有数据到来,还是超时。有数据到来才能调用
驱动编程
使用poll机制时,驱动程序的核心就是提供对应的drv_poll函数。在drv_poll函数中要做两件事:
- 把当前线程挂入等待队列
wq,使用内核提供的函数poll_wait来实现:- APP调用一次
poll,可能导致drv_poll被调用2次,但是我们并不需要把当前线程挂入队列2次。 - 使用内核的函数
poll_wait把线程挂入队列,如果线程已经在队列里了,它就不会再次挂入。
- APP调用一次
- 返回设备状态,APP调用
poll函数时,有可能是查询有没有数据可以读,有可能是查询有没有空间可以写数据。- 有数据可以读:
(POLLIN | POLLRDNORM),POLLRDNORM 等同于 POLLIN,为了兼容某些 APP 把它们一起返回。 - 有空间可以写:
(POLLOUT | POLLWRNORM),POLLWRNORM 等同于 POLLOUT ,为了兼容某些 APP 把它们一起返回。
- 有数据可以读:
APP 调用poll后,很有可能会休眠。在按键驱动的中断服务程序中,也要有唤醒操作,也是通过内核提供的wake_up_interruptible函数从等待队列中唤醒。
所以中断服务函数不用做任何改动,主要是要实现drv_poll驱动函数:
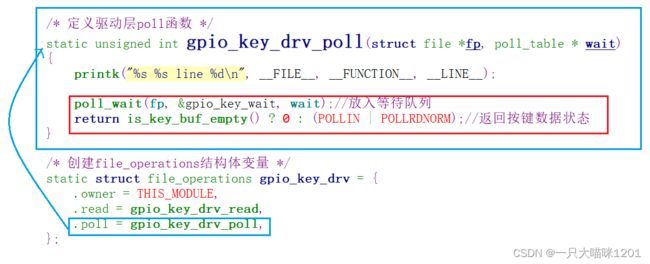
如上图所示代码,在file_operations结构体中增加poll成员,并用gpio_key_drv_poll初始化,在该函数中完成那两件事情:
- 将当前线程放入等待队列
gpio_key_wait,和前面休眠唤醒的是一个队列,但是不进行休眠。 - 返回按键数据状态,根据环形缓冲区是否为空,决定返回0,还是
(POLLOUT | POLLWRNORM)。
可以看到,poll机制的驱动程序就是这么简单,此时就实现了,比较复杂一点的是应用层的程序。
应用编程
应用层poll系统调用的用法,自行查看man手册,或者移步本喵的文章poll,本喵这里就直接用了。
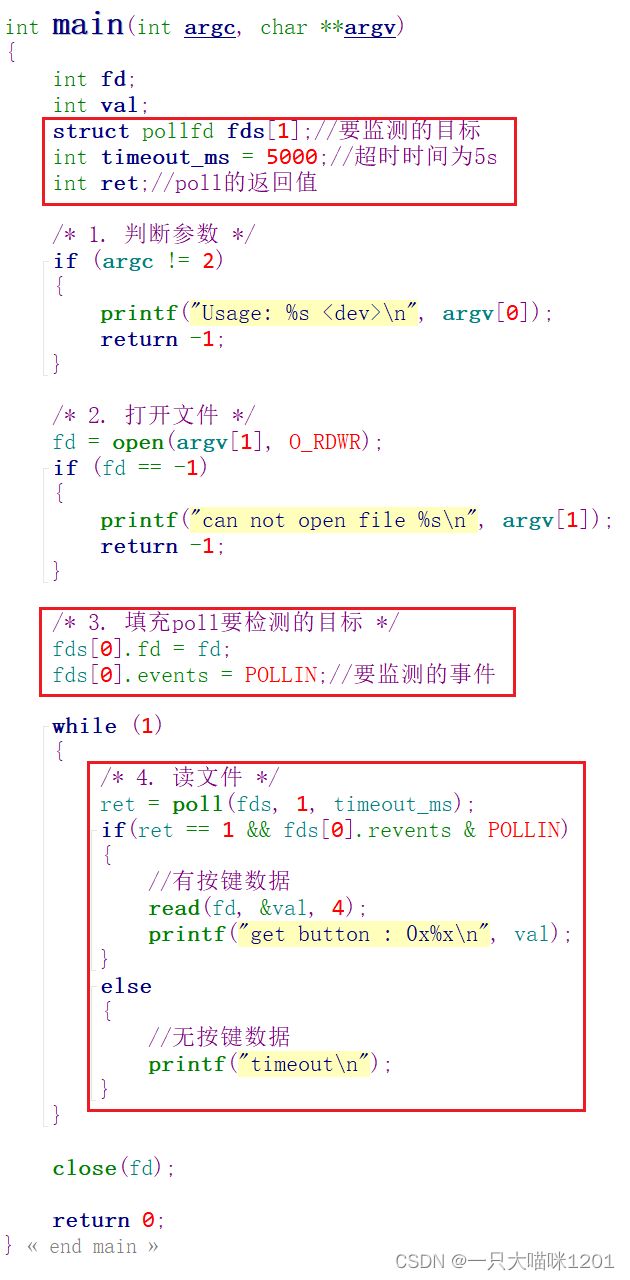
如上图所示代码,由于我们只检测一个按键,所以struct pollfd fds[1]只有一个元素即可,设置超时时间为5s。
将驱动设备使用open打开后,将得到的fd作为监测目标填充到struct pollfd结构体中,包括检测的事件是POLLIN,和驱动程序中的drv_poll相对应。
全部配置好后,使用poll获取按键数据的状态:
- 没有按键数据,程序则阻塞在
poll处休眠一会儿,等待被唤醒。 - 被唤醒后:
- 如果是因为超时唤醒,则
poll得到的数据状态就是0,则打印超时。 - 如果是因为数据到来唤醒,则
poll得到是数据状态就是(POLLOUT | POLLWRNORM),使用read读取按键数据,此时read必然不会阻塞。
- 如果是因为超时唤醒,则
演示:
最后将驱动程序和应用程序上传到服务器进行编译,并且将生成的gpio_key_drv.ko和button_test拷贝到网络文件系统中。
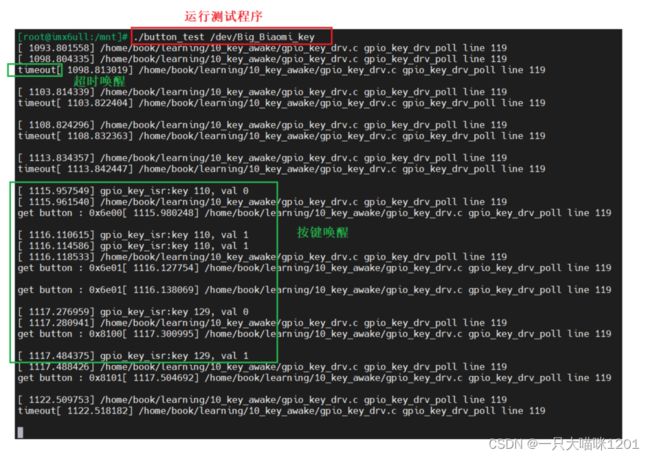
如上图所示,将驱动程序安装好以后,在开发板运行测试程序后:
drv_poll驱动程序先运行一次查看按键数据状态,发现没有数据以后休眠一会儿。- 迟迟没有按键按下,被超时唤醒,打印
timeout。 - 当按键数据按下后,被数据唤醒后,打印按键数据。
异步通知
如果APP在读取按键数据的过程中不想休眠怎么办?使用异步通知,也就是当有了按键数据以后,驱动程序主动通知APP有数据了,此时APP去读取数据即可,平时APP可以干其他事情。

如上图所示使用异步通知的流程图。
- 使用
open系统调用打开驱动,得到驱动的文件描述符fd。 - 使用
signal系统调用为SIGIO信号注册信号处理函数func。- 按键驱动程序发出的信号是
SIGIO信号,表示有数据输入。 - APP收到
SIGIO信号后,处理函数func就会被自动调用。
- 按键驱动程序发出的信号是
- 使用
fcntl将当前进程的PID设置到内核文件系统中的struct file结构体中,方便后面驱动程序找到进程。 - 读取驱动程序文件的
Flag。 - 设置
Flag里面的FASYNC位为 1:- 该
Flag也是记录到内核文件系统的struct file结构体中,驱动程序通过struct file* filp指针可以获取该标志。 - 当
FASYNC位发生变化时,内核文件系统就会调用驱动程序的drv_fasync函数。
- 该
drv_fasync是否调用是由FASYNC标志位决定的,应用层并没有相应的fasync函数。- 在
drv_fasync函数中,调用内核提供的faync_helper函数,它会根据FAYSNC的值决定是否设置button_async->fa_file=驱动文件filp:- 驱动文件
filp结构体里面含有之前设置的PID。 on就代表是着FAYSNC位,它为1则设置button_async,它为0则不设置。
- 驱动文件
- APP可以做其他事情。
- 按键按下后,产生按键中断,调用中断服务函数。
- 在中断服务函数中调用内核提供的
kill_fasync函数,向APP发送信号:- 如果
button_async->fa_file非空,则从它指向的filp的结构体中取出进程的PID,向该线程发送SIGIO信号。 - 如果
button_async->fa_file为空,则该函数什么都不做,不会发送任何信号。
- 如果
- 在按键中断服务程序中发送
SIGIO信号后,信号处理函数func被调用。 - 在
func中使用read系统调用读取按键数据。 - 最终会调用驱动层中的
drv_read读取按键数据,此时一定是有数据的,并不会休眠。
在整个流程中可以看到,FASYNC的变化是为了启动drv_fasync,而真正做事情的是fasync_helper函数。
驱动编程
使用异步通知时,驱动程序的核心有两步:
- 提供对应的
drv_fasync函数。 - 并在合适的时机发信号,这一点在按键中断服务程序中完成。

如上图所示,创建一个struct fasync_struct*类型的全局指针变量button_fasync,该变量专门用来根据进程PID找到对应的进程的。
在file_operations结构体中增加成员fasync,并且使用gpio_key_drv_fasync初始化,在该函数中,只需要调用fasync_helper函数即可完成异步通知的记录工作。

如上图所示,在按键的中断服务函数中,通过内核提供的kill_fasync函数,向button_fasync中PID代表的线程发送SIGIO信号。
应用编程
异步通知比较复杂的部分是在应用层的测试函数中:

如上图所示代码,首先定义一个信号处理函数sig_func函数,当该进程接收到信号后就调用该函数,此时一定是有按键数据的,所以直接调用read读取按键数据即可。
在main函数中,使用signal系统调用为SIGIO信号注册处理函数sig_func,当按键按下后,驱动程序就会发出SIGIO信号,处理函数就会被调用。
但是驱动程序怎么知道要将SIGIO信号发给哪个进程呢?此时就需要使用fcntl系统调用,将当前进程的PID和异步通知标志位FASYCN设置到内核文件系统的struct file结构体中。
此时由于FASYCN发发生了变动,触发了驱动层中的drv_fasync被调用,从而导致fasync_helper被调用。
此时异步通知就设置完毕了,APP就可以在while循环中干其他事情了,根本不用关心按键,因为按键会通过信号主动通知APP。
演示:
编译等过程本喵就不啰嗦了,直接演示:

如上图所示,运行测试程序后:
- 没有按键数据,APP在处理其他事情,打印
I am A Big Miaomi字符串。 - 按键按下后,在信号处理函数中读取按键数据并且打印出来。
阻塞与非阻塞
所谓阻塞,就是等待某件事情发生。比如调用read读取按键时,如果没有按键数据则read函数不会返回,它会让线程休眠等待。
此时的休眠是我们在驱动程序中通过内核提供的wait_event_xxx函数实现的。
能不能让read函数既能工作于阻塞方式,也可以工作于非阻塞方式?可以!
- 在APP中使用
open函数时,可以传入O_NONBLOCK,就表示要使用非阻塞方式读取数据。默认情况是阻塞方式读取。 - 在APP中
open一个文件之后,也可以通过fcntl系统调用修改为阻塞或非阻塞读取数据。
- 对于字符设备文件,
O_NONBLOCK起作用的前提是驱动程序针对O_NONBLOCK做了处理。
应用编程
这里本喵先来实现应用层编程:
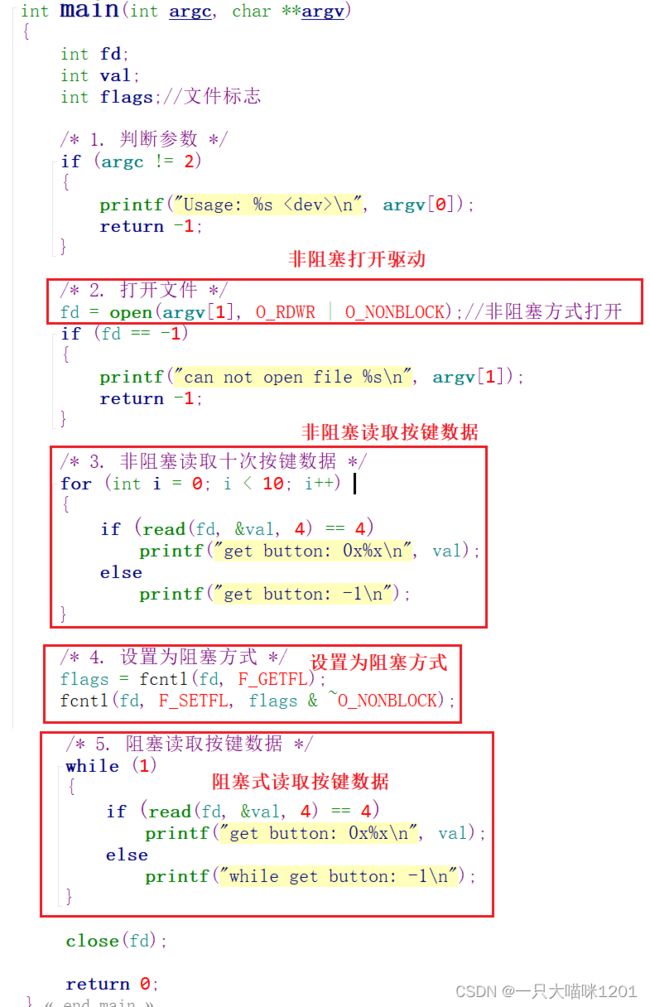
如上图所示代码,它分为如下几步:
- 在使用
open打开驱动设备时,传入O_NONBLOCK标志,使用非阻塞访问的方式打开。 - 然后不管有没有按键数据,使用非阻塞方式读取十次按键数据:
- 有按键数据则返回按键数据,并且打印。
- 没有按键数据则直接返回,并且打印-1。
- 使用
fcntl将驱动设备设置为阻塞访问方式。 - 在
while死循环中,使用read阻塞读取按键数据:- 有按键数据则返回按键数据,并且打印。
- 没有按键数据则阻塞不动,不会打印内容。
驱动编程

如上图代码所示,需要在驱动层的drv_read中作一些改动:
- 因为非阻塞方式在应用层设置的,并且
O_NONBLOCK标志设置到内核文件系统的struct file结构体中的。 - 所以在
drv_read驱动程序中,如果是非阻塞方式,并且没有按键数据,则不阻塞直接返回-EAGAIN。 - 如果是非阻塞方式,且有按键数据,则并不会将当前线程放入到等待队列中,而是返回按键数据。
此时驱动程序就支持阻塞和非阻塞两种访问方式了。
演示:

如上图所示,在开发板上运行起测试程序以后:
- 先非阻塞读取按键数据十次,由于此时没有按键数据,所以返回的都是-1。
- 然后开始阻塞读取按键数据,有按键数据时打印,没有按键数据时阻塞不动。
- 可以看到,我们在驱动程序中,这几种读取按键的方式都提供了。
- 应用层可以使用任意一种,我们不能指定应用层使用哪种方式。
- 驱动开发的原则只提供能力,不提供策略。
定时器
所谓定时器,就是闹钟,时间到后就要做某些事。有两个要素:时间、做 事,换成程序员的话就是:超时时间、函数。
本喵这里讲解的定时器是软件定时器,它依赖系统的滴答定时器。在内核中使用定时器比较简单,涉及到一些内核提供的函数:
| 函数 | 说明 |
|---|---|
| setup_timer(timer, fn, data) | 设置定时器,主要是初始化 timer_list 结构体,设置其中的函数、超时事件等参数。 |
| void add_timer(struct timer_list *timer) | 向内核添加定时器。 |
| int mod_timer(struct timer_list *timer, unsigned long expires) | 修改定时器的超时时间 |
| int del_timer(struct timer_list *timer) | 删除定时器。 |
当超时时间到达,内核就会调用这个超时函数: timer->function(timer->data)。

编译内核时,可以在内核源码根目录下用ls -a看到一个隐藏文件,它就 是内核配置文件。打开后可以看到CONFIG_HZ=100,它表示内核每秒中会发生 100 次系统滴答中断(tick)。
每发生一次 tick 中断,全局变量jiffies就会累加1,定时器的时间就是基于 jiffies的,我们修改超时时间时,一般使用这2种方法:
- 在
add_timer之前,直接修改:timer.expires = jiffies + xxx;// xxx 表示多少个滴答后超时,也就是 xxx*10mstimer.expires = jiffies + 2*HZ;// HZ 等于 CONFIG_HZ,2*HZ 就相当于 2 秒
- 在
add_timer之后,使用mod_timer修改:mod_timer(&timer, jiffies + xxx);// xxx 表示多少个滴答后超时,也就是 xxx*10msmod_timer(&timer, jiffies + 2*HZ);// HZ 等于 CONFIG_HZ,2*HZ 就相当于 2 秒
定时器消抖
具体的原理本喵就不再讲解了,主要就是按下一次按键后会多次触发按键中断,由于本喵设置的是双边沿触发,所以触发的会更多,通过定时器来消除这个按键抖动。
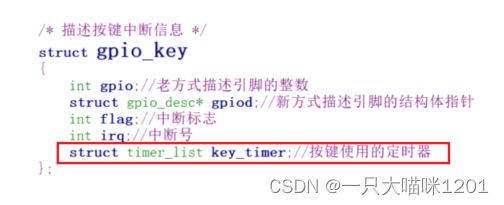
如上图所示,在描述按键中断的结构体中,再增加一个struct timer_list类型的成员key_timer,因为一个每一个按键都需要有一个定时器来消抖。
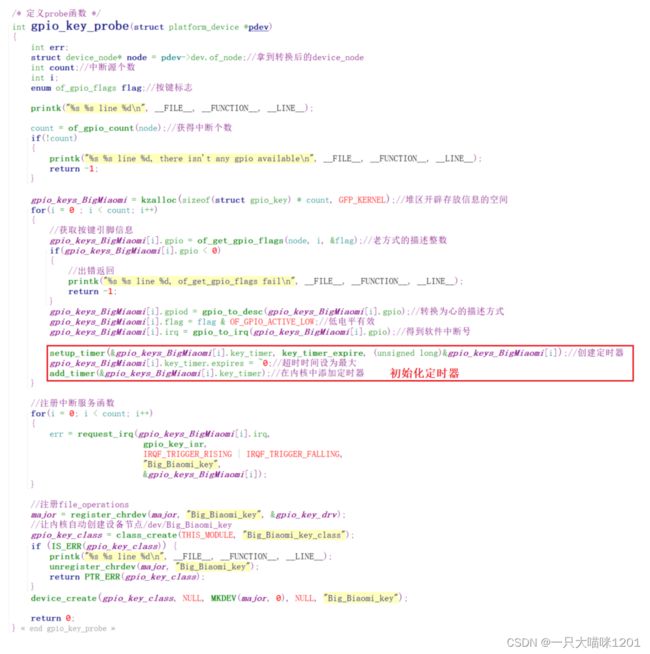
如上图所示,在probe函数中,对每个按键中断初始化后再初始化其定时器:
- 使用
setup_timer初始化定时器,其中key_timer_expire是超时函数,最后一个参数是超时函数的参数,把按键传进去,方便使用。 - 将超时时间设置为最大,如果是0的话,定时器一被添加到内核中就会执行超时函数。
- 使用
add_timer将定时器添加到内核中。
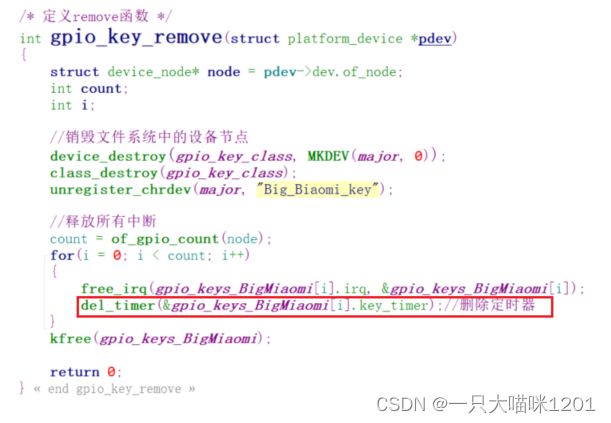
如上图所示,在卸载驱动程序的时候,使用del_timer将按键的定时器删除掉。

如上图所示按键中断服务函数,此时读取按键数据就不在这里进行了,这里仅修改超时时间:
- 使用
mod_timer修改超时时间,每发生一次抖动定时器超时向后推迟200ms。

如上图所示,在定时器的超时函数key_timer_expire中做了原本在按键中断服务函数中的事情:
- 构建按键数据,将其放入到环形缓冲区中。
- 从等待队列中唤醒休眠的线程。
- 向进程发送
SIGIO信号。
还增加了一些打印语句,用于查看定时器超时函数和按键中断服务函数的执行次数。
演示:
只需要将驱动程序编译后重新安装到开发板上,运行之前的测试程序即可:
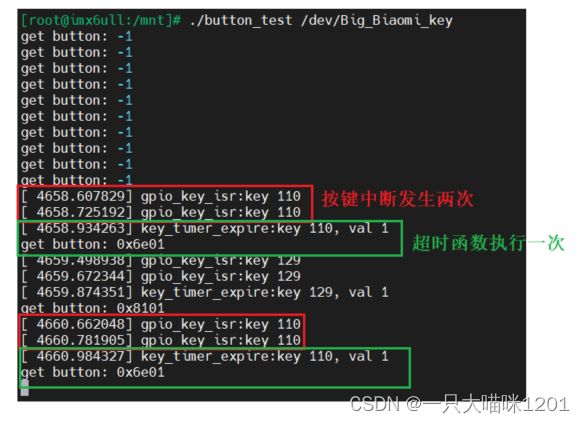
如上图所示,此时就达到了消抖的功能:
- 按键按下后,按键中断服务函数执行了两次,定时器两次推迟超时200ms。
- 按键稳定后,定时器超时函数执行一次,打印按键数据。
- 应用层也只读取了一次按键数据。
总结
休眠唤醒,POLL机制,异步通知,阻塞与非阻塞都属于驱动程序的基石,非常的重要,后面的复杂的驱动程序也是依赖于这几个机制实现的。
不用应用层是否使用这几个机制,我们在驱动程序中需要全部提供,要遵守提供能力,不提供策略的原则。