有限元非线性求解算法——Newton-Raphson
0. 前言
有限元静力问题的求解实际上最终通过某些理论方法(最小势能原理,虚功原理,加权残值法等)转化为 K(u)u=F 形式的矩阵方程(非线性方程或者方程组)的求解,这里K是全局刚度矩阵,通过力学三大方程和试函数求得;u是节点位移向量,是待求的未知数,其中可以通过位移边界条件减少未知数数量;F是节点荷载向量,是由荷载边界条件依据静力等效转化为节点荷载向量。因此求解非线性方程组,研究求解算法是一个难点,求解算法主要为增量法和迭代法,实际上真正有限元求解时是两种方法结合使用的。
1.算法来源
Newton-Raphson(牛顿-拉夫森)迭代法是一种求解方程根的常用方法。它使用函数的一阶和二阶导数信息来高效地逐步逼近方程根。
略去高阶项,整理可得到下式

需要注意的是,牛顿-拉夫森迭代法并不总是收敛。如果函数f(x)在某些点上的一阶或二阶导数为0,或者在根周围有一定的震荡行为,都可能导致算法无法收敛。此外,如果初始点x0选取得离根过远,也可能会导致算法无法收敛。因此,在实际使用中,需要根据实际情况灵活选择初始点、步长和迭代精度等参数,以保证算法的准确性和可靠性。下面图中展示了算法的格式。
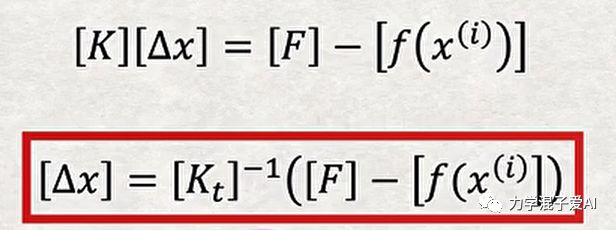
非线性方程

非线性方程组

2. 非线性求解迭代过程
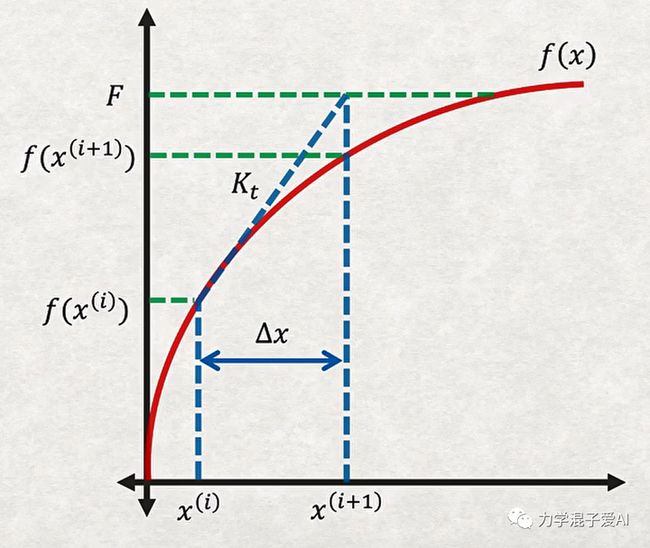
下面解释下有限元的求解非线性问题的迭代过程。上图是某个荷载增量步的求解示意图。
第一次迭代前,需要给一个位移初始值(假定的位移值),实际上位移初始值可以随便给,但是考虑到算法的实用性,收敛性和收敛速度,我们一般肯定希望初始值要么取值具有一般性或者接近真实位移值。一般初始位移值是通过当前荷载增量和初始刚度的比值来确定,在这里初始刚度就是当前增量开始时的刚度矩阵,荷载增量是人为设置的(有限元软件里面也可以设置,例如abaqus中设置如下图)
荷载步内求解迭代过程
然后根据当前给定的位移值求出当前的刚度矩阵(记住刚度矩阵与材料属性和几何参数有关),并计算当前位移匹配的结构内力,接着计算内力与当然外载F的差值(也可以用位移容差控制,实际有限元中考虑荷载容差和位移容差),如果这个差值小于设置的容差,那么就停止迭代,否则继续重复上述步骤。

3.案例

![]()
(*Material Nonlinearity Example*)
Clear["Global`*"]
(*Parameters*)
L = 1.0;
A = 1;
p = X1^2;
(*Newton-Raphson Parameters*)
Xi = 1;
ErrorLimit = 0.5;
maxIter = 20;
(*Stress-Strain Relationship*)
s = 10*u'[X1] + 100000*u'[X1]^3;
(*Exact solution*)
DE = D[s*A, X1] + p;
sol = NDSolve[{DE == 0, u[0] == 0, u[L] == 0}, u[X1], X1];
uExact = u[X1] /. sol[[1]];
Plot[uExact, {X1, 0, L}];
(*RR Approximation,最小势能原理*)
(*此案例相当于三节点二次单元*)
(*Approximation Function*)
uApprox = a0 + a1*X1 + a2*X1^2;
(*Essential Boundary Conditions*)
BC1 = uApprox /. {X1 -> 0};
BC2 = uApprox /. {X1 -> L};
sol1 = Solve[{BC1 == 0, BC2 == 0}, {a0, a1}]; {a0, a1} = {a0, a1} /.
sol1[[1]];
uApprox;
(*Total Internal Strain Energy*)
S = 10*e + 100000*e^3;
SED = Integrate[S, {e, 0, e}]; (*单位体积应变能*)
e = D[uApprox, X1];
TSE = Integrate[SED, {X1, 0, L}]; (*总应变能*)
(*work*)
w = Integrate[p*uApprox, {X1, 0, L}]; (*外力功*)
(*Potential Energy*)
PE = TSE -
w ; (*偏导等于0,对应的方程组的解,即为代求*)
(*Newton-Raphson Method*)
ai = {a2};
Func = D[PE, a2] ; (*我们要这个方程组的解,这里是解a2*)
Kt = D[Func, a2];
{
{For[i = 1, i <= maxIter, i++,
(*calculate Function and Kt at currentIteration*)
FuncIter = Func /. {a2 -> Xi};
KtIter = Kt /. {a2 -> Xi};
(*Solving for Delta x*)
Delta = (-1)*FuncIter/KtIter;
(*Finding xi for Next Iteration*)
XInit = Xi;
Xi = Xi + Delta;
(*Break Loop Once Convergence 0ccurs*)
Error = (Delta/XInit)*100;
If[Abs[Error] <= ErrorLimit,
Print["Analysis Converged ! "];
Print[" Coefficient a2 = ", Xi]; Print["Error = ", Error, "(%)"];
a2 = Xi;
Conv = 1;
Break[]];
(*Track Results*)
Print["Iteration: ", i];
Print["coefficient a2 = ", Xi]; Print["Error = ", Error, "(%)"];
(*Error Message if Max Number of IterationsReached*)If[i == maxIter,
Print["Max of Number of Iterations Reached"]];
]},
{\[Placeholder]}
}
uApprox
Plot[{uExact, uApprox}, {X1, 0, L}, PlotLegends -> {"Exact" , "FEA"},
AxesLabel -> {"Bar Length", "Displacement"}, AspectRatio -> 0.5]下图显示了有限元解与精确解的沿着杆长的位移分布图,有一定的误差主要是这里为了简单起见,仅仅用了一个单元(三节点二次单元),想测试单元数量对结果精度的影响,可以将我的第一篇有限元笔记的代码和当前的结合起来修改下即可,这篇笔记旨在学习了解非线性有限元计算的的思路方法。

4. 结语
我一直都在分享笔记,是因为当前我也处于学习理论的状态,不过笔记较多,我分享的主要是之前一段时间的学习笔记,加上我当前的部分理解,重新整理呈现了出来。目前我在寻找损伤力学,断裂力学,张量分析,离散元等方面的优秀教材资料等,希望大家能分享给我,一起学习交流。获取更多资料和学习交流欢迎大家关注公众号冬生亦东生,分享旨在本人复习和交流