真心话大冒险!关于自动驾驶的现状和未来,Mobileye的回答是?
过去的十年,可以说是从主动安全、辅助驾驶到自动驾驶快速演进的周期。这其中,无论是技术迭代,还是成本优化,以及技术和商业化路线的争论,备受行业关注。
同时,市场上的声音,也很多。有激进、谨慎、保守甚至是悲观。尤其是新技术的导入,加上车企的乐观宣传,也带来杂音不断。
本周,在美国CES展期间,Mobileye总裁兼首席执行官Amnon Shashua教授连续第十年在现场发布企业年度回顾和行业展望报告。今年的主题是:Now. Next. Beyond.

在Amnon Shashua看来,过去十年间,这个行业发生了翻天覆地的变化,接下来的十年也将如此。其中,“可脱手可脱眼”以及无人驾驶两个演进里程碑将是最大的行业焦点。

按照该公司的计划,上述里程碑的落地时间点预计在2025-2026年。从目前预期的成本来看,ADAS前视一体方案的平均价格约为50美元,NOA约为 1,500美元, L3级自动驾驶约为3000美元,L4级则高达50,000美元。
而在整体的业务布局来看,Mobileye的目标非常明确:实现端到端,从整合芯片、传感器、软件(包括域控制器)、REM(数据众包),构建自动驾驶系统的关键技术和产品矩阵。

在具体落地方面,Amnon Shashua着重提出了两个问题。
第一个问题,是如何让“可脱手可脱眼”的智能驾驶系统达到足够的平均故障间隔时间(MTBF)要求,衡量指标就是两次接管间隔的时间,应该比人类驾驶员的表现要好得多才行。
按照一些公开统计数据显示,人类驾驶员每行驶50万英里或5万小时就会发生一次碰撞事故。这意味着,智驾系统需要超过这个水准。
第二个问题,是如何实现规模化。
在Amnon Shashua看来,任何一家企业要生存,做大做强,都必须实现规模化量产交付。但行业的现状是,不同的品牌、车型有不同的市场定位,这意味着,对于系统的要求也存在差异化。
同时,越来越多的车企,寻求自研或者自主可控,并且智驾系统需要有品牌标签。这些都是阻碍供应商实现规模化交付的主要障碍。
在高工智能汽车研究院看来,这也导致过去几年,从早期的黑盒交付,市场开始转向更多的白盒交付。但,取得阶段性成功的案例,往往需要车企在研发上要进行更大的投入。
一些行业人士甚至表示,很多车企并没有认真考虑过「投入产出」问题,很多时候连续数年养活数百人团队的费用,早就可以收购一家外部的第三方供应商。
而在Amnon Shashua看来,车企从头开始搭建智驾平台,风险非常高。“我们看到,许多汽车制造商都经历了这一过程,但成功率有限。”
对于Mobileye来说,就是要寻找一个平衡点,在这个平衡点上,主机厂和供应商可以同时实现规模化和对驾驶体验的有效控制,和自研系统一样。
为此,Mobileye推出了Mobileye's DXP平台,包括操作系统、工具链和抽象,允许主机厂对系统中的每个独特元素进行重新编码和控制。
在谈及近年来技术端的快速变革,Amnon Shashua也有着自己的独特看法。在过去两三年里,人工智能取得了突破性进展。ChatGPT、Transformer、BEV等等,几乎无人不晓。
而端到端的自动驾驶解决方案,也让「感知决策一体化模型」成为不少车企和自动驾驶公司追逐的技术制高点。
在Amnon Shashua看来,端到端方案目前主要分为两种,一种是感知的端到端,决策和控制则使用单独的软件堆栈和模型;另一种,就是完全的端到端,就是所谓的感知决策一体化。
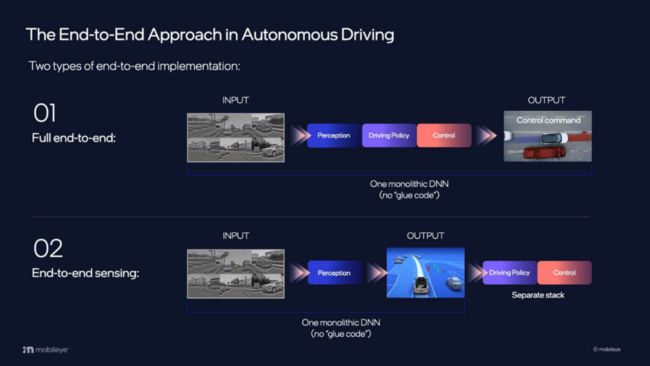
对于完全端到端系统,问题在于缺乏透明度;谁也不知道,系统在做决策时,到底在做什么。其次,你无法控制系统的输出;而最关键的是,这样的系统,即便达到99.9%的准确率,但依然会犯错。

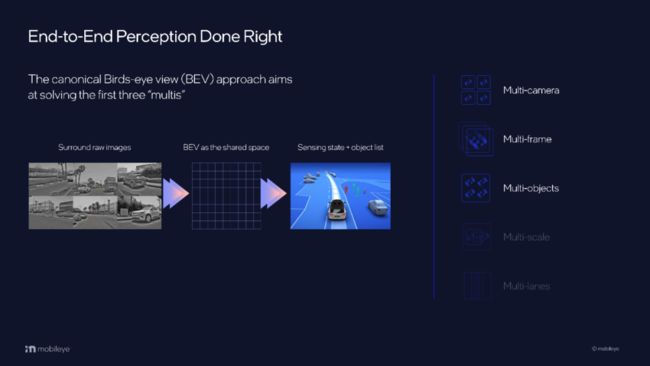
按照Mobileye的策略,该公司后续将把重点放在端到端感知,并提出了五个基础指标:多摄像头(Multi-Camera)、多帧(Multi-Frame)、多个目标物(Multi-Objects)、多尺度(Multi-Scale)、以及多车道(Multi-Lane)。
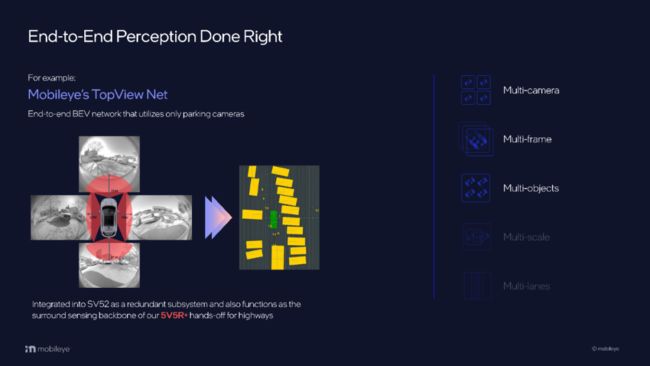
目前,该公司已经推出了名为:Top View Net的BEV模型,基于4个环视摄像头,实现10-15米左右的360度环境感知。此外,还可以扩展至5V(前向摄像头+环视)5R+,充分利用泊车环视感知能力。
不过,对于继续增加硬件数量,Mobileye持保留态度,原因是算力负荷。(或许,这也是为什么,之前行业内有人吐槽,不少企业的BEV是假的;即便真正落地了,也是进行了大量的裁剪。)
按照该公司的测算,在车身周围形成200米的360度感知能力(256通道、足够的分辨率,以及稠密计算),需要NVIDIA H100加速卡这样的硬件来进行处理。
显然,这在目前的前装量产方案中,是不可行的。这也是为什么之前有芯片厂商提出,短期内,最合理的方式是在云端进行训练和预测加速。(事实上,这也是特斯拉采取的FSD+Dojo架构)
数据显示,当前端侧硬件性能提升放缓,每年只有1.1倍左右,五年期望的10倍提升实际只有2倍,十年期望的100倍提升只有4倍。相比而言,云端加速,可能是应对性能瓶颈的重要解决方案。
这也是为什么,此前英伟达给出的解决方案是,与云服务合作伙伴一起,为车企和自动驾驶企业,提供端到端的全栈式AI加速计算解决方案。
关注高工智能汽车公众微信号,在底部对话框输入:CES报告,获取Mobileye完整版PPT。