ROS方向第二次汇报(1)
文章目录
- 1.本方向内学习内容:
-
- 1.1.节点:
-
- 注意事项:
- 1.2话题:
-
- 1.2.1创建话题发布者:
- 1.2.2创建话题订阅者:
- 1.3.服务:
-
- 1.3.1.创建服务客户端的程序流程:
- 1.3.2.创建服务服务端的程序流程:
- 1.4.通信接口:
-
- **定义接口**
- 1.4.Rviz:
-
- 1.4.1.启动Rviz:
- 1.4.2.主界面情况:
- 1.4.3.rviz2 中的预定义插件:
- 1.5.python基础:
1.本方向内学习内容:
1.1.节点:
节点的编码流程包括:
编程接口初始化
创建节点并初始化
实现节点功能
销毁节点并关闭接口
例如一个示例(发布‘’hello world日志信息‘’)(面向过程版)
import rclpy # ROS2 PY接口库
from rclpy.node import Node # ROS2 节点类
import time
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 PY接口初始化
node=Node("node_helloworld") # 创建ROS2节点对象并初始化
while reclpy.ok(): # ROS2系统是否正常运行
node.get_logger().info(“Hello World”) #ROS2日志输出
time.sleep(0.5)
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 PY接口
如下是面向对象版本,封装了一个class:
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
class HelloWorldNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
while rclpy.ok(): # ROS2系统是否正常运行
self.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = HelloWorldNode("node_helloworld_class") # 创建ROS2节点对象并进行初始化
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
注意事项:
注意:
1.在修改代码后需要重新编译才能运行修改后的程序!
2.注意创建工作空间,编译工作空间后一定要记得在install找到配置环境变量的文件并在bashrc.中完成环境变量配置source ~/wsname…,否则运行节点的时候会找不到功能包!!!(本人已踩坑,切勿遗漏该步骤)
3.在功能包中的setup.py中设置命令行主函数入口(main)
4.功能包是用命令创建,而不是如同创建工作空间一样直接建文件夹!!!
如下是另一个示例(通过摄像头检测红色物体):
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import cv2 # OpenCV图像处理库
import numpy as np # Python数值计算库
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
def object_detect(image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) # 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5, (0, 255, 0), -1) # 将苹果的图像中心点画出来
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(50)
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = Node("node_object_webcam") # 创建ROS2节点对象并进行初始化
node.get_logger().info("ROS2节点示例:检测图像中的苹果")
cap = cv2.VideoCapture(0)
while rclpy.ok():
ret, image = cap.read() # 读取一帧图像
if ret == True:
object_detect(image) # 苹果检测
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
实现具体功能或结构还是需要py/c++语法支持的,后续还应该学习基本语法知识。
节点命令常见操作:
ros2 node list #查看节点列表
ros2 node info <node_name> #查看某节点信息
1.2话题:
话题使用发布订阅模型,消息就在节点之间流转,发布者和订阅者数量都灵活可变。
用.msg文件来定义发布/订阅数据结构。话题发布订阅过程可连续周期进行。

1.2.1创建话题发布者:
流程包括:
1.编程接口初始化
2.创建节点并初始化
3.创建发布者对象
4.创建并填充话题消息
5.发布话题消息
6.销毁节点并关闭接口
不要忘记配置程序入口与编译
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # 字符串消息类型
"""
创建一个发布者节点
"""
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.pub = self.create_publisher(String, "chatter", 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
def timer_callback(self): # 创建定时器周期执行的回调函数
msg = String() # 创建一个String类型的消息对象
msg.data = 'Hello World' # 填充消息对象中的消息数据
self.pub.publish(msg) # 发布话题消息
self.get_logger().info('Publishing: "%s"' % msg.data) # 输出日志信息,提示已经完成话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = PublisherNode("topic_helloworld_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
用self.create_publisher()方法创建发布者对象。
1.2.2创建话题订阅者:
流程包括:
1.编程接口初始化
2.创建节点并初始化
3.创建订阅者对象
4.回调函数处理话题数据
5.销毁节点并关闭接口
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # ROS2标准定义的String消息
"""
创建一个订阅者节点
"""
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(\
String, "chatter", self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理
self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = SubscriberNode("topic_helloworld_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
1.3.服务:
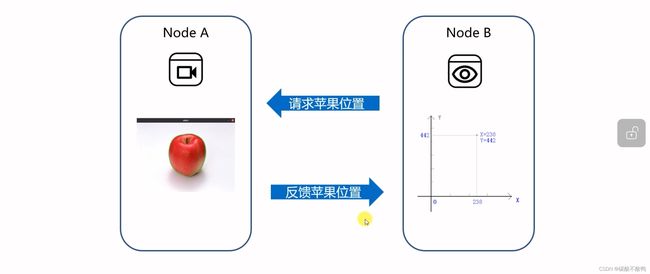
与话题通讯不同,服务通讯更像是你问我答,先有请求再有反馈,一般不能连续周期进行。服务器唯一,客户端可以不唯一。用.srv文件来定义请求和应答数据结构。
1.3.1.创建服务客户端的程序流程:
1.编程接口初始化。
2.创建节点并初始化。
3.创建客户端对象。
4.创建并发送请求数据。
5.等待服务器端应答数据。
6.销毁节点并关闭接口。
ROS2服务示例-请求目标识别,等待目标位置应答:
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import GetObjectPosition # 自定义的服务接口
class objectClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.client = self.create_client(GetObjectPosition, 'get_target_position')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('service not available, waiting again...')
self.request = GetObjectPosition.Request()
def send_request(self):
self.request.get = True
self.future = self.client.call_async(self.request)
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = objectClient("service_object_client") # 创建ROS2节点对象并进行初始化
node.send_request()
while rclpy.ok():
rclpy.spin_once(node)
if node.future.done():
try:
response = node.future.result()
except Exception as e:
node.get_logger().info(
'Service call failed %r' % (e,))
else:
node.get_logger().info(
'Result of object position:\n x: %d y: %d' %
(response.x, response.y))
break
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
1.3.2.创建服务服务端的程序流程:
1.编程接口初始化。
2.创建节点并初始化。
3.创建服务端对象。
4.通过回调函数处进行服务
5.向客户端反馈应答结果。
6.销毁节点并关闭接口。
ROS2服务示例-提供目标识别服务:
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
import numpy as np # Python数值计算库
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
from learning_interface.srv import GetObjectPosition # 自定义的服务接口
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
class ImageSubscriber(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(
Image, 'image_raw', self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于OpenCV图像与ROS的图像消息的互相转换
self.srv = self.create_service(GetObjectPosition, # 创建服务器对象(接口类型、服务名、服务器回调函数)
'get_target_position',
self.object_position_callback)
self.objectX = 0
self.objectY = 0
def object_detect(self, image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(
mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) # 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5,
(0, 255, 0), -1) # 将苹果的图像中心点画出来
self.objectX = int(x+w/2)
self.objectY = int(y+h/2)
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(50)
def listener_callback(self, data):
self.get_logger().info('Receiving video frame') # 输出日志信息,提示已进入回调函数
image = self.cv_bridge.imgmsg_to_cv2(data, 'bgr8') # 将ROS的图像消息转化成OpenCV图像
self.object_detect(image) # 苹果检测
def object_position_callback(self, request, response): # 创建回调函数,执行收到请求后对数据的处理
if request.get == True:
response.x = self.objectX # 目标物体的XY坐标
response.y = self.objectY
self.get_logger().info('Object position\nx: %d y: %d' %
(response.x, response.y)) # 输出日志信息,提示已经反馈
else:
response.x = 0
response.y = 0
self.get_logger().info('Invalid command') # 输出日志信息,提示已经反馈
return response
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImageSubscriber("service_object_server") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
1.4.通信接口:
接口就是一种相互关系,只有彼此匹配才能建立链接。ROS常用的通信接口:话题(topic)、服务(service)、动作(action),而进行通信所用的消息类型和三种接口的类型有关。
三种接口定义:


查看接口定义的命令:
ros2 interface (show) <...> #查看预定义接口详细信息(补不全则会现实有哪些)
ros2 interface package <功能包名> #查看功能包中的自定义接口有哪些
俗话说接口的定义,其实是实现通讯所需要的消息类型(数据结构)的定义。
案例:话题接口的定义与使用
话题通信接口的定义也是类似的,继续从之前的机器视觉案例中来衍生,我们想把服务换成话题,周期发布目标识别的位置,不管有没有人需要。

运行效果
现在我们会运行三个节点:
第一个节点,将驱动相机并发布图像话题,此时的话题数据使用的是ROS中标准定义的Image图像消息;
第二个节点,会运行视觉识别功能,识别目标的位置,这个位置我们希望封装成话题消息,发布出去,谁需要使用谁就来订阅;
第三个节点,订阅位置话题,打印到终端中。
启动三个终端,分别运行以上节点:
$ ros2 run usb_cam usb_cam_node_exe
$ ros2 run learning_topic interface_object_pub
$ ros2 run learning_topic interface_object_sub
定义接口
在这个例程中,我们使用ObjectPosition.msg定义了服务通信的接口:
需要在功能包外创建一个存放接口定义的功能包,在里面创建存放msg接口定义的文件夹,再创建:
(learning_interface/msg/)ObjectPosition.msg
编辑文件:

话题消息的内容是一个位置,我们使用x、y坐标值进行描述。
完成定义后,还需要在功能包的CMakeLists.txt中配置编译选项,让编译器在编译过程中,根据接口定义,自动生成不同语言的代码:
...
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/ObjectPosition.msg")
...

接口调用的时候注意from …import…地址正确,具体运用方法就替换消息类型即可。
到此,还应该掌握的知识:类与对象。
1.4.Rviz:
1.4.1.启动Rviz:
ros2 run rviz2 rviz2
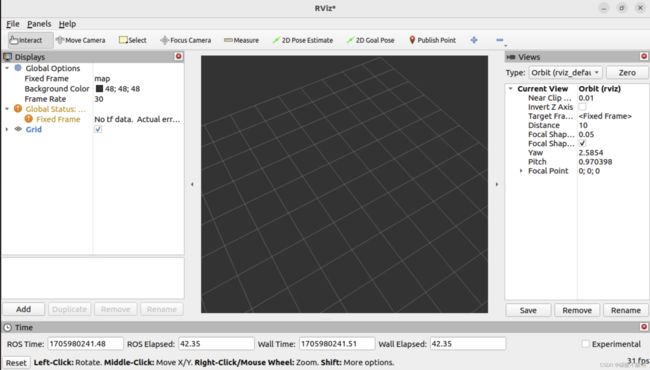
1.4.2.主界面情况:
1.上部为工具栏:包括视角控制、预估位姿设置、目标设置等,还可以添加自定义插件;
2.左侧为插件显示区:包括添加、删除、复制、重命名插件,显示插件,以及设置插件属性等功能;
3.中间为3D试图显示区:以可视化的方式显示添加的插件信息;
4.右侧为观测视角设置区:可以设置不同的观测视角;
5.下侧为时间显示区:包括系统时间和ROS时间。
左侧插件显示区默认有两个插件:

Global Options:该插件用于设置全局显示相关的参数,一般情况下,需要自行设置的是 Fixed Frame 选项,该选项是其他所有数据在可视化显示时所参考的全局坐标系;
Global Status:该插件用于显示在 Global Options 设置完毕 Fixed Frame 之后,所有的坐标变换是否正常。
右侧观测视角设置区:

有Orbit、ThirdPersonFollower等视角类型可供选择。
1.4.3.rviz2 中的预定义插件:
| 名称 | 功能 | 消息类型 |
|---|---|---|
Axes |
显示 rviz2 默认的坐标系。 | |
Camera |
显示相机图像,必须需要使用消息:CameraInfo。 | sensormsgs/msg/Image,sensormsgs/msg/CameraInfo |
Grid |
显示以参考坐标系原点为中心的网格。 | |
Grid Cells |
从网格中绘制单元格,通常是导航堆栈中成本地图中的障碍物。 | navmsgs/msg/GridCells |
Image |
显示相机图像,但是和Camera插件不同,它不需要使用 CameraInfo 消息。 | sensormsgs/msg/Image |
InteractiveMarker |
显示来自一个或多个交互式标记服务器的 3D 对象,并允许与它们进行鼠标交互。 | visualizationmsgs/msg/InteractiveMarker |
Laser Scan |
显示激光雷达数据。 | sensormsgs/msg/LaserScan |
Map |
显示地图数据。 | navmsgs/msg/OccupancyGrid |
Markers |
允许开发者通过主题显示任意原始形状的几何体。 | visualizationmsgs/msg/Marker,visualizationmsgs/msg/MarkerArray |
Path |
显示机器人导航中的路径相关数据。 | navmsgs/msg/Path |
PointStamped |
以小球的形式绘制一个点。 | geometrymsgs/msg/PointStamped |
Pose |
以箭头或坐标轴的方式绘制位姿。 | geometrymsgs/msg/PoseStamped |
Pose Array |
绘制一组 Pose。 | geometrymsgs/msg/PoseArray |
Point Cloud2 |
绘制点云数据。 | sensormsgs/msg/PointCloud,sensormsgs/msg/PointCloud2 |
Polygon |
将多边形的轮廓绘制为线。 | geometrymsgs/msg/Polygon |
Odometry |
显示随着时间推移累积的里程计消息。 | navmsgs/msg/Odometry |
Range |
显示表示来自声纳或红外距离传感器的距离测量值的圆锥。 | sensormsgs/msg/Range |
RobotModel |
显示机器人模型。 | |
TF |
显示 tf 变换层次结构。 | |
Wrench |
将geometrymsgs /WrenchStamped消息显示为表示力的箭头和表示扭矩的箭头加圆圈。 | geometrymsgs/msg/WrenchStamped |
Oculus |
将 RViz 场景渲染到 Oculus 头戴设备。 |
1.5.python基础:
由于篇幅限制,已于1月23日上传第一部分:Python基础(1)https://editor.csdn.net/md/?articleId=135776769