【转载】linux摄像头驱动
Linux摄像头驱动学习第一篇,对虚拟视频驱动Virtual Video Driver(vivid)进行测试、分析、编写。
V4L2(Video for Linux two)是Linux内核中关于视频设备的内核驱动框架,为上层的访问底层的视频设备提供了统一的接口。
V4L2可以支持多种设备,它可以有以下几种接口:
- Video capture interface(视频采集接口):从摄像头等设备上获取视频数据,是V4L2设计最初功能;
- Video output interface(视频输出接口):驱动计算机的外围视频、图像显示设备;
- Video overlay interface(直接传输视频接口):把从视频采集设备采集过来的信号直接输出到输出设备之上,而不用经过CPU;
- Video output overlay device(视频输出覆盖设备):也被称为OSD(On-Screen Display),即在显示画面上叠加一层显示,比如菜单设置界面;
- VBI interface(视频间隔消隐信号接口):提供对VBI(Vertical Blanking Interval)数据的控制,它可以使应用可以访问传输消隐期的视频信号;
- Radio interface(收音机接口):处理从AM或FM高频头设备接收来的音频流;
1.V4L2框架分析
2.测试vivid
这里目的先加载vivid驱动,然后运行应用程序调用vivid驱动,初步体验效果。
2.1加载驱动
先在Ubuntu16.04上输入uname -a,可以得到当前Ubuntu内核版本号:
| 1 |
Linux ubuntu 4.4.0-116-generic #140-Ubuntu SMP Mon Feb 12 21:23:04 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux |
当前内核版本是4.4.0-116-generic,然后去Linux内核官网下载对应的内核,提取出其中的linux-4.13.9/drivers/media/文件夹。
我的版本是 5.15.0-91-generic
修改media/platform/vivid/下的Makefile:
| # SPDX-License-Identifier: GPL-2.0 KERNEL_DIR =/usr/src/linux-headers-5.15.0-91-generic vivid-objs := vivid-core.o vivid-ctrls.o vivid-vid-common.o vivid-vbi-gen.o \ obj-$(CONFIG_VIDEO_VIVID) += vivid.o |
然后执行make编译,获得vivid.ko
此时加载模块sudo insmod vivid.ko,发现报错如下:
| 1 |
insmod: ERROR: could not insert module vivid.ko: Unknown symbol in module |
原因是模块中的一些依赖函数的模块,没有加载,通过dmesg命令,可以看到很多函数:
| 1 2 3 4 5 6 7 8 |
[ 488.786285] vivid: Unknown symbol vb2_queue_init (err 0) [ 488.786295] vivid: Unknown symbol v4l2_ctrl_poll (err 0) [ 488.786304] vivid: Unknown symbol v4l2_enum_dv_timings_cap (err 0) [ 488.786314] vivid: Unknown symbol video_ioctl2 (err 0) [ 488.786364] vivid: Unknown symbol v4l2_get_timestamp (err 0) [ 488.786389] vivid: Unknown symbol v4l2_device_put (err 0) [ 488.786418] vivid: Unknown symbol vb2_ioctl_streamoff (err 0) ………… |
需要先加载这些函数所在的模块才行。
这里有两个方法:
一是找到函数对应的文件,修改Makefile,编译出来,先加载。
二是找到函数对应的文件,其实模块都已经编译好了,路径在/lib/modules/4.4.0-116-generic/kernel/drivers/media/v4l2-core/里面,直接加载即可。
这两种方式都需要慢慢找对应的文件,比较麻烦,直接:
| 1 2 3 |
sudo modprobe vivid //安装自带vivid及依赖 sudo rmmod vivid //卸载自带的vivid sudo insmod ./vivid.ko //安装自己编译的vivid.ko |
这里先使用modprobr加载vivid,会将其依赖一并加载,然后再卸载vivid,最后加载上我们编译的vivid.ko。
这里为什么使用自己编译的vivid.ko,而不使用自带的?
因为后面修改vivid源码后,重新加载修改后的驱动,才知道修改后的效果。
2.2应用程序
Linux摄像头测试软件webcam、spcaview、luvcview、xawtv等,经测试,luvcview和xawtv比较靠谱。
-
luvcview
1
2
3
4
luvcview -h //帮助信息
luvcview -d /dev/videoX //指定设备
luvcview -L //查询当前摄像头所支持的所有数据格式以及分辨率信息
luvcview //运行摄像头
-
xawtv
1
2
3
4
xawtv -h //帮助信息
xawtv -c /dev/videoX //指定设备
xawtv -noalsa //关闭声卡启动
xawtv //运行摄像头
这里加载vivid驱动后,运行xawtv效果如下:

3.分析vivid
第一次接触V4L2,直接对内核提供的Virtual Video Driver(vivid)进行分析,只要熟悉了vivid,后续再对摄像头再进行分析,就会轻松很多。
vivid是内核提供的一个虚拟机的视频设备驱动,内核提供的vivid源码在linux-4.13.9/drivers/media/platform/vivid/。
3.1 初始化、注册分析
在vivid_init()里分别注册了vivid_pdev和vivid_pdrv,注册后,由于两者name一致,则会调用probe()。在probe()里面主要进行初始化、注册等相关流程。

可以看到,在probe()里,会调用vivid_create_instance(),让后在里面先分配一个video_device,然后设置video_device,包括操作函数ops,ioctl操作函数,设备等。
然后对ctrl属性进行详细的设置,最后注册video_device,和进行常规的字符设备注册。
因此,写摄像头驱动程序的流程如下:
- 分配
video_device:video_device_alloc()或kzalloc();- 设置
video_device:.fops、.ioctl_ops、dev;- 注册
video_device:video_register_device();
3.2 操作函数分析
再来看看操作函数是如何调用的:
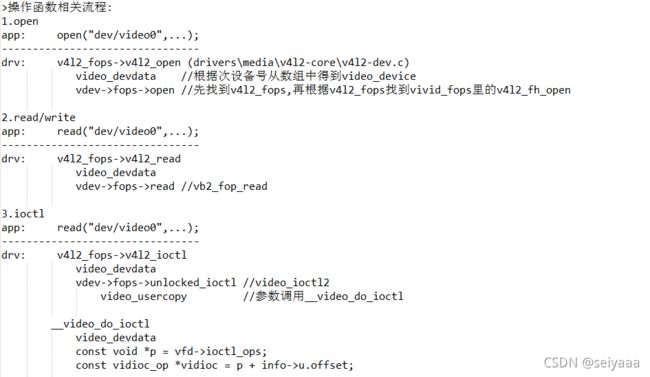
当应用层open()/read()/write()操作/dev/videox时,先找到v4l2_fops,
然后调用v4l2_open/v4l2_read/v4l2_write(drivers/media/v4l2-core/v4l2-dev.c),
再通过video_devdata根据次设备号从数组中得到video_device,再找到vivid_fops里对应的操作函数。
ioctl的前面流程类似,后面通过video_usercopy()获取传入的ioctl类型,找到对应ioctl_ops,调用不同的ioctl。
3.3 ioctl_ops分析
摄像头驱动有众多的ioctl,这些ioctl实现了对设备的控制:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 |
static const struct v4l2_ioctl_ops vivid_ioctl_ops = { /* 表示它是一个摄像头设备 */ .vidioc_querycap = vidioc_querycap, /* 摄像头数据格式的操作 */ .vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid, //列举格式 .vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap, //获取格式 .vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap, //测试格式 .vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, //设置格式 /* 支持multi-planar */ .vidioc_enum_fmt_vid_cap_mplane = vidioc_enum_fmt_vid_mplane, .vidioc_g_fmt_vid_cap_mplane = vidioc_g_fmt_vid_cap_mplane, .vidioc_try_fmt_vid_cap_mplane = vidioc_try_fmt_vid_cap_mplane, .vidioc_s_fmt_vid_cap_mplane = vidioc_s_fmt_vid_cap_mplane, /* 数据输出操作 */ .vidioc_enum_fmt_vid_out = vidioc_enum_fmt_vid, //枚举输出格式 .vidioc_g_fmt_vid_out = vidioc_g_fmt_vid_out, //获取输出格式 .vidioc_try_fmt_vid_out = vidioc_try_fmt_vid_out, //测试输出格式 .vidioc_s_fmt_vid_out = vidioc_s_fmt_vid_out, //设置输出格式 /* 支持multi-planar */ .vidioc_enum_fmt_vid_out_mplane = vidioc_enum_fmt_vid_mplane, .vidioc_g_fmt_vid_out_mplane = vidioc_g_fmt_vid_out_mplane, .vidioc_try_fmt_vid_out_mplane = vidioc_try_fmt_vid_out_mplane, .vidioc_s_fmt_vid_out_mplane = vidioc_s_fmt_vid_out_mplane, .vidioc_g_selection = vidioc_g_selection, //获取选择矩形 .vidioc_s_selection = vidioc_s_selection, //设置选择矩形 .vidioc_cropcap = vidioc_cropcap, //查询裁剪限制 .vidioc_g_fmt_vbi_cap = vidioc_g_fmt_vbi_cap, //获取指向原始数据VBI的指针 .vidioc_try_fmt_vbi_cap = vidioc_g_fmt_vbi_cap, .vidioc_s_fmt_vbi_cap = vidioc_s_fmt_vbi_cap, .vidioc_g_fmt_sliced_vbi_cap = vidioc_g_fmt_sliced_vbi_cap, .vidioc_try_fmt_sliced_vbi_cap = vidioc_try_fmt_sliced_vbi_cap, .vidioc_s_fmt_sliced_vbi_cap = vidioc_s_fmt_sliced_vbi_cap, .vidioc_g_sliced_vbi_cap = vidioc_g_sliced_vbi_cap, .vidioc_g_fmt_vbi_out = vidioc_g_fmt_vbi_out, .vidioc_try_fmt_vbi_out = vidioc_g_fmt_vbi_out, .vidioc_s_fmt_vbi_out = vidioc_s_fmt_vbi_out, .vidioc_g_fmt_sliced_vbi_out = vidioc_g_fmt_sliced_vbi_out, .vidioc_try_fmt_sliced_vbi_out = vidioc_try_fmt_sliced_vbi_out, .vidioc_s_fmt_sliced_vbi_out = vidioc_s_fmt_sliced_vbi_out, .vidioc_enum_fmt_sdr_cap = vidioc_enum_fmt_sdr_cap, .vidioc_g_fmt_sdr_cap = vidioc_g_fmt_sdr_cap, .vidioc_try_fmt_sdr_cap = vidioc_try_fmt_sdr_cap, .vidioc_s_fmt_sdr_cap = vidioc_s_fmt_sdr_cap, .vidioc_overlay = vidioc_overlay, .vidioc_enum_framesizes = vidioc_enum_framesizes, .vidioc_enum_frameintervals = vidioc_enum_frameintervals, .vidioc_g_parm = vidioc_g_parm, .vidioc_s_parm = vidioc_s_parm, .vidioc_enum_fmt_vid_overlay = vidioc_enum_fmt_vid_overlay, .vidioc_g_fmt_vid_overlay = vidioc_g_fmt_vid_overlay, .vidioc_try_fmt_vid_overlay = vidioc_try_fmt_vid_overlay, .vidioc_s_fmt_vid_overlay = vidioc_s_fmt_vid_overlay, .vidioc_g_fmt_vid_out_overlay = vidioc_g_fmt_vid_out_overlay, .vidioc_try_fmt_vid_out_overlay = vidioc_try_fmt_vid_out_overlay, .vidioc_s_fmt_vid_out_overlay = vidioc_s_fmt_vid_out_overlay, .vidioc_g_fbuf = vidioc_g_fbuf, .vidioc_s_fbuf = vidioc_s_fbuf, /* 缓冲区操作 */ .vidioc_reqbufs = vb2_ioctl_reqbufs, //申请 .vidioc_create_bufs = vb2_ioctl_create_bufs, //创建 .vidioc_prepare_buf = vb2_ioctl_prepare_buf, //准备 .vidioc_querybuf = vb2_ioctl_querybuf, //查询 .vidioc_qbuf = vb2_ioctl_qbuf, //放入 .vidioc_dqbuf = vb2_ioctl_dqbuf, //取出 .vidioc_expbuf = vb2_ioctl_expbuf, //导出 .vidioc_streamon = vb2_ioctl_streamon, //启动 .vidioc_streamoff = vb2_ioctl_streamoff, //停止 /* 输入源操作 */ .vidioc_enum_input = vidioc_enum_input, //枚举输入源 .vidioc_g_input = vidioc_g_input, //获取输入源 .vidioc_s_input = vidioc_s_input, //设置输入源 .vidioc_s_audio = vidioc_s_audio, //设置音频 .vidioc_g_audio = vidioc_g_audio, //获取音频 .vidioc_enumaudio = vidioc_enumaudio, //枚举音频 .vidioc_s_frequency = vidioc_s_frequency, //设置频率 .vidioc_g_frequency = vidioc_g_frequency, //获取输入源 .vidioc_s_tuner = vidioc_s_tuner, //设置调谐器 .vidioc_g_tuner = vidioc_g_tuner, //获取调谐器 .vidioc_s_modulator = vidioc_s_modulator, //设置调制器 .vidioc_g_modulator = vidioc_g_modulator, //获取调制器 .vidioc_s_hw_freq_seek = vidioc_s_hw_freq_seek, //硬件频率搜索 .vidioc_enum_freq_bands = vidioc_enum_freq_bands, //枚举调谐器或调制器支持的频段 /* 输出端操作 */ .vidioc_enum_output = vidioc_enum_output, //枚举视频输出端 .vidioc_g_output = vidioc_g_output, //获取视频输出 .vidioc_s_output = vidioc_s_output, //设置视频输出 .vidioc_s_audout = vidioc_s_audout, //设置音频输出 .vidioc_g_audout = vidioc_g_audout, //获取音频输出 .vidioc_enumaudout = vidioc_enumaudout, //枚举视频输出端 /* 制式操作 */ .vidioc_querystd = vidioc_querystd, //查询制式 .vidioc_g_std = vidioc_g_std, //获取制式 .vidioc_s_std = vidioc_s_std, //设置制式 .vidioc_s_dv_timings = vidioc_s_dv_timings, //设置DV时序 .vidioc_g_dv_timings = vidioc_g_dv_timings, //获取DV时序 .vidioc_query_dv_timings = vidioc_query_dv_timings, //查询DV时序 .vidioc_enum_dv_timings = vidioc_enum_dv_timings, //枚举DV时序 .vidioc_dv_timings_cap = vidioc_dv_timings_cap, //查询DV应用程序功能 .vidioc_g_edid = vidioc_g_edid, //获取EDID数据块 .vidioc_s_edid = vidioc_s_edid, //设置EDID数据块 /* 调试操作 */ .vidioc_log_status = vidioc_log_status, //输出设备状态到内核日志 .vidioc_subscribe_event = vidioc_subscribe_event, //订阅V4L2事件 .vidioc_unsubscribe_event = v4l2_event_unsubscribe, //取消订阅V4L2事件 }; |
提取出11个必须的ioctl:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
/* 表示它是一个摄像头设备 */ .vidioc_querycap = vidioc_querycap, /* 摄像头数据格式的操作 */ .vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid, //列举格式 .vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap, //获取格式 .vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap, //测试格式 .vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, //设置格式 /* 缓冲区操作 */ .vidioc_reqbufs = vb2_ioctl_reqbufs, //申请 .vidioc_querybuf = vb2_ioctl_querybuf, //查询 .vidioc_qbuf = vb2_ioctl_qbuf, //放入 .vidioc_dqbuf = vb2_ioctl_dqbuf, //取出 .vidioc_streamon = vb2_ioctl_streamon, //启动 .vidioc_streamoff = vb2_ioctl_streamoff, //停止 |
3.4 数据获取过程分析
1.请求分配缓冲区
| 1 2 |
app:ioctl(fd, VIDIOC_REQBUFS, xx) videobuf_reqbufs(vdev->queue, p->memory, &p->count);//没分配真正buf |
2.查询映射缓冲区
| 1 2 3 4 5 6 7 8 |
app:ioctl(fd, VIDIOC_QUERYBUF, xx) videobuf_querybuf //获得buf的数据格式、大小、每一行长度、高度 v4l2_mmap vb2_fop_mmap videobuf_mmap_mapper __videobuf_mmap_mapper mem->vaddr = vmalloc_user(pages); //这里分配buf |
3.把缓冲区放入队列
| 1 2 3 4 5 |
app:ioctl(fd, VIDIOC_QBUF, xx) videobuf_qbuf q->ops->buf_prepare(q, buf, field); //调用驱动程序提供的函数做预处理 list_add_tail(&buf->stream, &q->stream); //把缓冲区放入队列的尾部 q->ops->buf_queue(q, buf); //用驱动程序提供的"入队列函数" |
4.启动摄像头
| 1 2 3 |
app:ioctl(fd, VIDIOC_STREAMON, xx) videobuf_streamon q->streaming = 1; |
5.用select查询是否有数据
| 1 2 3 4 5 6 7 8 9 10 11 12 |
v4l2_poll vdev->fops->poll(); vivi_poll videobuf_poll_stream buf = list_entry(); //从队列的头部获得buf poll_wait(); //如果没有数据则休眠 vivid_thread_vid_cap //内核进程唤醒 vivid_thread_vid_cap_tick vivid_fillbuff //构造数据 vb2_buffer_done wake_up(); //唤醒进程 |
6.有数据后,从队列取出缓冲区
| 1 2 3 4 5 |
app:ioctl(fd, VIDIOC_DQBUF, xx) //使用VIDIOC_DQBUF获取buf状态 videobuf_dqbuf stream_next_buffer //在队列里获得有数据的缓冲区 list_del //把它从队列中删掉 videobuf_status //把这个缓冲区的状态返回给APP |
7.读取对应地址缓冲区
应用程序根据VIDIOC_DQBUF所得到缓冲区状态,知道是哪一个缓冲区有数据,就去读对应的地址(该地址来自前面的mmap)
调试技巧:
1.得到xawtv进行了哪些系统调用:
sudo strace -o xawtv.log xawtv
2.在串口终端下,修改打印等级:sudo echo "8 4 1 7" >/proc/sys/kernel/printk
3.当无串口,即前面方法无效时,在SSH登陆时:tail -f /var/log/kern.log &
可实现内核打印增量显示。
4.编写vivid
根据前面的分析,简单记录下虚拟视频驱动的编写流程:
1.注册平台设备和驱动;
2.probe()函数:
a.分配video_device;
b.设置video_device,包括:release、fops、ioctl_ops、v4l2_dev;
c.注册设置video_device;
d.其它:定义/初始化自旋锁/定时器;
3.填充操作函数v4l2_file_operations:
a.open():初始buf化队列和设置定时器;
b.close():删除定时器和释放buf队列;
c.mmap():调用videobuf_mmap_mapper开辟虚拟内存;
d.poll():调用videobuf_poll_stream实现poll机制非阻塞访问;
4.填充操作函数v4l2_ioctl_ops:
前面介绍的11个必须ioctl,几乎都是调用内核提供的API;
5.填充操作函数videobuf_queue_ops:
对buf进行一些操作;
6.填充数据:
利用定时器,不断产生数据并唤醒进程,实现获取到图像采集数据;
[my_vivid.c]link
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 |
#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include "fillbuf.c" /* 队列操作a: 定义自旋锁、定时器、buf队列 */ static spinlock_t my_vivid_queue_slock; static struct timer_list my_vivid_timer; static struct videobuf_queue my_vivid_vb_vidqueue; static struct list_head my_vivid_vb_local_queue; static void my_vivid_timer_function(unsigned long data) { struct videobuf_buffer *vb; void *vbuf; struct timeval ts; printk("enter %s\n", __func__); /* 1. 构造数据: 从队列头部取出第1个videobuf, 填充数据 */ /* 1.1 从本地队列取出第1个videobuf */ if (list_empty(&my_vivid_vb_local_queue)) { goto out; } vb = list_entry(my_vivid_vb_local_queue.next, struct videobuf_buffer, queue); /* Nobody is waiting on this buffer, return */ if (!waitqueue_active(&vb->done)) goto out; /* 1.2 填充数据 */ vbuf = videobuf_to_vmalloc(vb); //memset(vbuf, 0xFF, vb->size); my_vivid_fillbuff(vb); vb->field_count++; do_gettimeofday(&ts); vb->ts = ts; vb->state = VIDEOBUF_DONE; /* 1.3 把videobuf从本地队列中删除 */ list_del(&vb->queue); /* 2. 唤醒进程: 唤醒videobuf->done上的进程 */ wake_up(&vb->done); out: /* 3. 修改timer的超时时间 : 30fps, 1秒里有30帧数据 * 每1/30 秒产生一帧数据 */ mod_timer(&my_vivid_timer, jiffies + HZ / 30); } /* 参考documentations/video4linux/v4l2-framework.txt: drivers\media\video\videobuf-core.c ops->buf_setup - calculates the size of the video buffers and avoid they to waste more than some maximum limit of RAM; ops->buf_prepare - fills the video buffer structs and calls videobuf_iolock() to alloc and prepare mmaped memory; ops->buf_queue - advices the driver that another buffer were requested (by read() or by QBUF); ops->buf_release - frees any buffer that were allocated. */ /* videobuf operations */ //APP调用ioctl VIDIOC_REQBUFS时会导致此函数被调用,它重新调整count和size static int my_vivid_buffer_setup(struct videobuf_queue *vq, unsigned int *count, unsigned int *size) { printk("enter %s\n", __func__); *size = my_vivid_format.fmt.pix.sizeimage; if (0 == *count) *count = 32; return 0; } //APP调用ioctlVIDIOC_QBUF时导致此函数被调用,它会填充video_buffer结构体并调用videobuf_iolock来分配内存 static int my_vivid_buffer_prepare(struct videobuf_queue *vq, struct videobuf_buffer *vb, enum v4l2_field field) { printk("enter %s\n", __func__); /* 1. 设置videobuf */ vb->size = my_vivid_format.fmt.pix.sizeimage; vb->bytesperline = my_vivid_format.fmt.pix.bytesperline; vb->width = my_vivid_format.fmt.pix.width; vb->height = my_vivid_format.fmt.pix.height; vb->field = field; /* 2. 做些准备工作 */ my_vivid_precalculate_bars(0); /* 3. 设置状态 */ vb->state = VIDEOBUF_PREPARED; return 0; } /* APP调用ioctl VIDIOC_QBUF时: * 1. 先调用buf_prepare进行一些准备工作 * 2. 把buf放入stream队列 * 3. 调用buf_queue(起通知、记录作用) */ static void my_vivid_buffer_queue(struct videobuf_queue *vq, struct videobuf_buffer *vb) { printk("enter %s\n", __func__); vb->state = VIDEOBUF_QUEUED; /* 把videobuf放入本地一个队列尾部 * 定时器处理函数就可以从本地队列取出videobuf */ list_add_tail(&vb->queue, &my_vivid_vb_local_queue); } /* APP不再使用队列时, 用它来释放内存 */ static void my_vivid_buffer_release(struct videobuf_queue *vq, struct videobuf_buffer *vb) { printk("enter %s\n", __func__); videobuf_vmalloc_free(vb); vb->state = VIDEOBUF_NEEDS_INIT; } static struct videobuf_queue_ops my_vivid_video_qops = { .buf_setup = my_vivid_buffer_setup, /* 计算大小以免浪费 */ .buf_prepare = my_vivid_buffer_prepare, .buf_queue = my_vivid_buffer_queue, .buf_release = my_vivid_buffer_release, }; /* v4l2_file_operations */ static int my_vivid_open(struct file *file) { printk("enter %s\n", __func__); //队列操作c:初始化 videobuf_queue_vmalloc_init(&my_vivid_vb_vidqueue, &my_vivid_video_qops, NULL, &my_vivid_queue_slock, V4L2_BUF_TYPE_VIDEO_CAPTURE, V4L2_FIELD_INTERLACED, sizeof(struct videobuf_buffer), NULL, NULL); /* 倒数第3个参数是buffer的头部大小 */ my_vivid_timer.expires = jiffies + 1; add_timer(&my_vivid_timer); return 0; } static int my_vivid_close(struct file *file) { printk("enter %s\n", __func__); del_timer(&my_vivid_timer); videobuf_stop(&my_vivid_vb_vidqueue); videobuf_mmap_free(&my_vivid_vb_vidqueue); return 0; } static int my_vivid_mmap(struct file *file, struct vm_area_struct *vma) { printk("enter %s\n", __func__); return videobuf_mmap_mapper(&my_vivid_vb_vidqueue, vma); } static unsigned int my_vivid_poll(struct file *file, struct poll_table_struct *wait) { printk("enter %s\n", __func__); return videobuf_poll_stream(file, &my_vivid_vb_vidqueue, wait); } /* v4l2_ioctl_ops */ static int my_vivid_vidioc_querycap(struct file *file, void *priv, struct v4l2_capability *cap) { printk("enter %s\n", __func__); strcpy(cap->driver, "my_vivid"); strcpy(cap->card, "my_vivid"); cap->version = 0x0001; cap->device_caps = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_STREAMING | V4L2_CAP_DEVICE_CAPS; cap->capabilities = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_STREAMING | V4L2_CAP_DEVICE_CAPS; return 0; } static int my_vivid_vidioc_enum_fmt_vid_cap(struct file *file, void *priv, struct v4l2_fmtdesc *f) { printk("enter %s\n", __func__); if (f->index >= 1) return -EINVAL; strcpy(f->description, "4:2:2, packed, YUYV"); f->pixelformat = V4L2_PIX_FMT_YUYV; return 0; } static int my_vivid_vidioc_g_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { printk("enter %s\n", __func__); memcpy(f, &my_vivid_format, sizeof(my_vivid_format)); return 0; } static int my_vivid_vidioc_try_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { unsigned int maxw, maxh; enum v4l2_field field; printk("enter %s\n", __func__); if (f->fmt.pix.pixelformat != V4L2_PIX_FMT_YUYV) return -EINVAL; field = f->fmt.pix.field; if (field == V4L2_FIELD_ANY) { field = V4L2_FIELD_INTERLACED; } else if (V4L2_FIELD_INTERLACED != field) { return -EINVAL; } maxw = 1024; maxh = 768; /* 调整format的width, height, * 计算bytesperline, sizeimage */ v4l_bound_align_image(&f->fmt.pix.width, 48, maxw, 2, &f->fmt.pix.height, 32, maxh, 0, 0); f->fmt.pix.bytesperline = (f->fmt.pix.width * 16) >> 3; f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline; return 0; } static int my_vivid_vidioc_s_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f) { int ret; printk("enter %s\n", __func__); ret = my_vivid_vidioc_try_fmt_vid_cap(file, NULL, f); if (ret < 0) return ret; memcpy(&my_vivid_format, f, sizeof(my_vivid_format)); return ret; } static int my_vivid_vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p) { printk("enter %s\n", __func__); return (videobuf_reqbufs(&my_vivid_vb_vidqueue, p)); } static int my_vivid_vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("enter %s\n", __func__); return (videobuf_querybuf(&my_vivid_vb_vidqueue, p)); } static int my_vivid_vidioc_qbuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("enter %s\n", __func__); return (videobuf_qbuf(&my_vivid_vb_vidqueue, p)); } static int my_vivid_vidioc_dqbuf(struct file *file, void *priv, struct v4l2_buffer *p) { printk("enter %s\n", __func__); return (videobuf_dqbuf(&my_vivid_vb_vidqueue, p, file->f_flags & O_NONBLOCK)); } static int my_vivid_vidioc_streamon(struct file *file, void *priv, enum v4l2_buf_type i) { printk("enter %s\n", __func__); return videobuf_streamon(&my_vivid_vb_vidqueue); } static int my_vivid_vidioc_streamoff(struct file *file, void *priv, enum v4l2_buf_type i) { printk("enter %s\n", __func__); videobuf_streamoff(&my_vivid_vb_vidqueue); return 0; } static const struct v4l2_ioctl_ops my_vivid_ioctl_ops = { // 表示它是一个摄像头设备 .vidioc_querycap = my_vivid_vidioc_querycap, /* 用于列举、获得、测试、设置摄像头的数据的格式 */ .vidioc_enum_fmt_vid_cap = my_vivid_vidioc_enum_fmt_vid_cap, .vidioc_g_fmt_vid_cap = my_vivid_vidioc_g_fmt_vid_cap, .vidioc_try_fmt_vid_cap = my_vivid_vidioc_try_fmt_vid_cap, .vidioc_s_fmt_vid_cap = my_vivid_vidioc_s_fmt_vid_cap, /* 缓冲区操作: 申请/查询/放入队列/取出队列 */ .vidioc_reqbufs = my_vivid_vidioc_reqbufs, .vidioc_querybuf = my_vivid_vidioc_querybuf, .vidioc_qbuf = my_vivid_vidioc_qbuf, .vidioc_dqbuf = my_vivid_vidioc_dqbuf, // 启动/停止 .vidioc_streamon = my_vivid_vidioc_streamon, .vidioc_streamoff = my_vivid_vidioc_streamoff, }; static const struct v4l2_file_operations my_vivid_fops = { .owner = THIS_MODULE, .open = my_vivid_open, .release = my_vivid_close, .mmap = my_vivid_mmap, .unlocked_ioctl = video_ioctl2, /* V4L2 ioctl handler */ .poll = my_vivid_poll, }; static struct video_device *my_vivid_dev; static struct v4l2_device v4l2_dev; static void my_vivid_dev_release(struct video_device *vdev) { printk("enter %s\n", __func__); } static int my_vivid_probe(struct platform_device *pdev) { int ret; printk("enter %s\n", __func__); /* 1.分配一个video_device结构体 */ my_vivid_dev = video_device_alloc(); if (NULL == my_vivid_dev) { printk("Failed to alloc video device (%d)\n", ret); return -ENOMEM; } /* 2.设置 */ my_vivid_dev->release = my_vivid_dev_release; my_vivid_dev->fops = &my_vivid_fops; my_vivid_dev->ioctl_ops = &my_vivid_ioctl_ops; my_vivid_dev->v4l2_dev = &v4l2_dev; //队列操作b:初始化自旋锁 spin_lock_init(&my_vivid_queue_slock); /* 3.注册 */ ret = video_register_device(my_vivid_dev, VFL_TYPE_GRABBER, -1); if (ret) { printk("Failed to register as video device (%d)\n", ret); goto err_register_dev; } //用定时器产生数据并唤醒进程 init_timer(&my_vivid_timer); my_vivid_timer.function = my_vivid_timer_function; INIT_LIST_HEAD(&my_vivid_vb_local_queue); return 0; err_register_dev: video_device_release(my_vivid_dev); return -ENODEV; } static int my_vivid_remove(struct platform_device *pdev) { printk("enter %s\n", __func__); v4l2_device_unregister(my_vivid_dev->v4l2_dev); video_device_release(my_vivid_dev); return 0; } static void my_vivid_pdev_release(struct device *dev) { printk("enter %s\n", __func__); } static struct platform_device my_vivid_pdev = { .name = "my_vivid", .dev.release = my_vivid_pdev_release, }; static struct platform_driver my_vivid_pdrv = { .probe = my_vivid_probe, .remove = my_vivid_remove, .driver = { .name = "my_vivid", }, }; static int my_vivid_init(void) { int ret; printk("enter %s\n", __func__); ret = platform_device_register(&my_vivid_pdev); if (ret) return ret; ret = platform_driver_register(&my_vivid_pdrv); if (ret) platform_device_unregister(&my_vivid_pdev); return ret; } static void my_vivid_exit(void) { printk("enter %s\n", __func__); platform_driver_unregister(&my_vivid_pdrv); platform_device_unregister(&my_vivid_pdev); } module_init(my_vivid_init); module_exit(my_vivid_exit); MODULE_LICENSE("GPL"); MODULE_AUTHOR("hceng MODULE_DESCRIPTION("A Virtual Video Test Code For Learn."); MODULE_ALIAS("My vivid"); MODULE_VERSION("V1.0"); |
5.测试效果
重新编译驱动,加载新驱动:
| 1 2 3 |
sudo modprobe vivid sudo rmmod vivid sudo insmod my_vivid.ko |
实测还差两个驱动依赖:
| 1 2 |
sudo insmod /lib/modules/4.4.0-116-generic/kernel/drivers/media/v4l2-core/videobuf-core.ko sudo insmod /lib/modules/4.4.0-116-generic/kernel/drivers/media/v4l2-core/videobuf-vmalloc.ko |
运行xawtv:
