51单片机原理及应用——张毅刚版本代码全集可复制
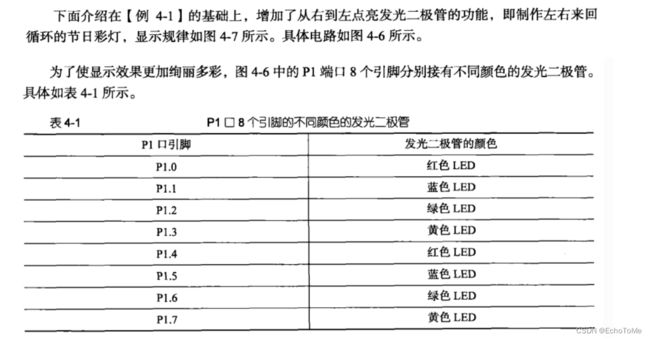
从左到右的流水灯的制作(重点)

#include 左到右的来回流水灯的制作
#include 开关量检测指示器

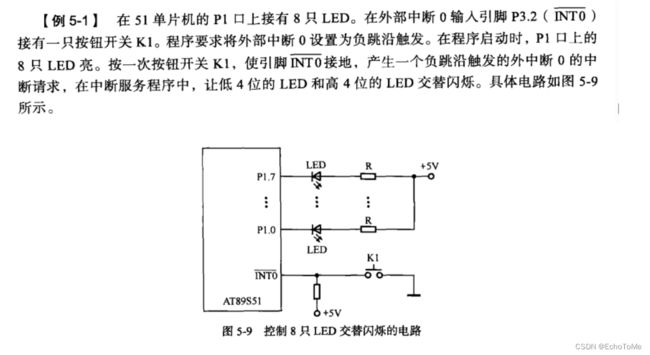
#include 单一外中断的应用
#include 两个外中断的应用
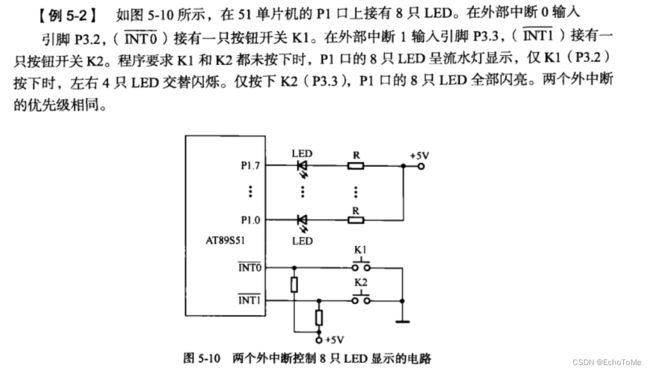
#include ps:这个代码因为设置了同级中断,所以在进入任何一个中断后,另一个中断不会被响应
中断嵌套(重点)
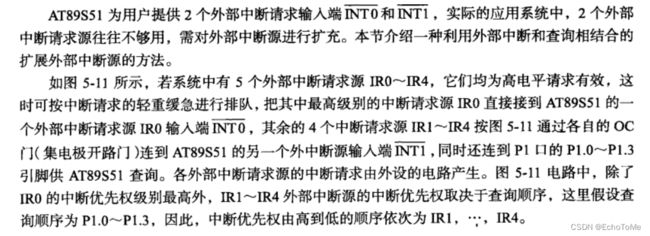
#include 多外部中断源系统设计(非重点)

#include P1口外接的8只LED每0.5s闪亮一次

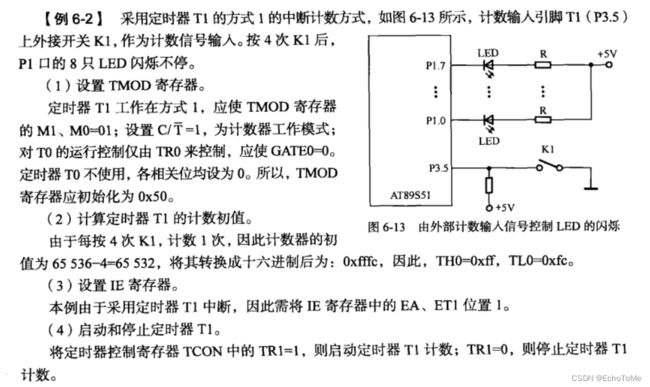
#include 计数器的应用(重点)
#include 扩展一个外部中断源(非重点)

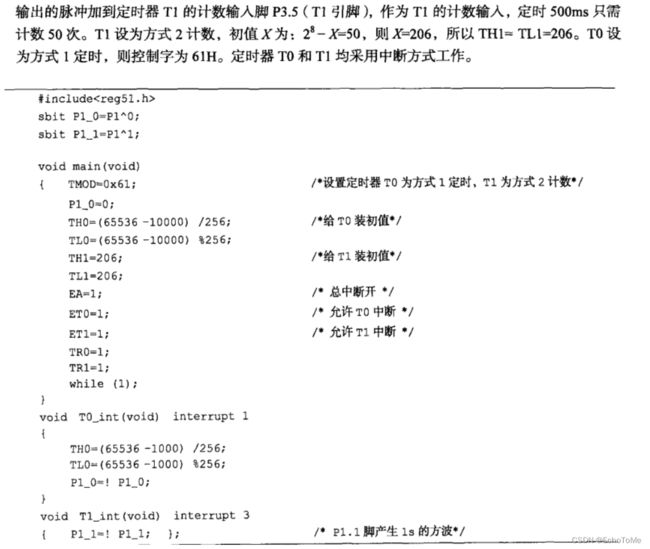
#include 在P1.0上产生周期为2ms的方波
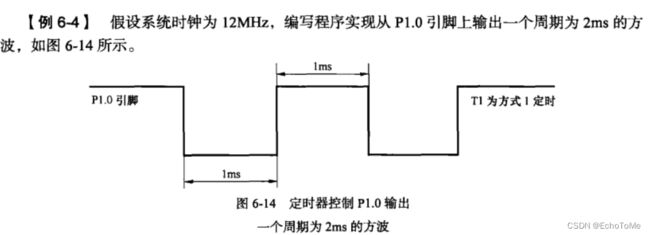
#include 在P1.1上产生周期为1s的方波
![]()
多次中断法(推荐)
#include 双定时器法(不推荐)
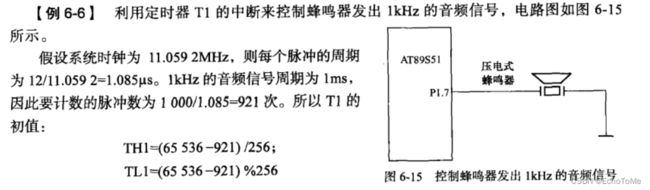
T1控制发出1KHZ的音频信号(重点)
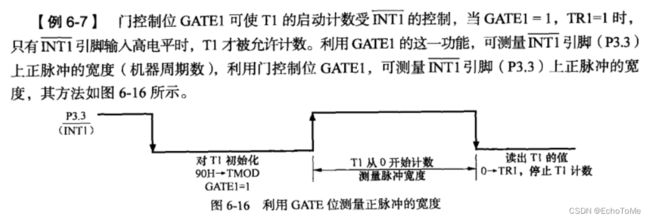
#include 测量脉冲宽度——门控位GATEx的应用(非重点)
#include 串口 方式0输出输入(非重点)
例题

#include 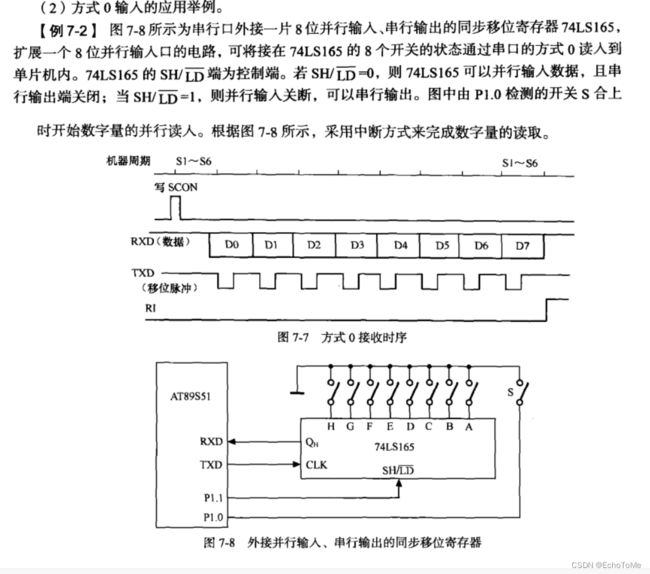
#include 方式1的应用
#include 方式2和方式3的应用

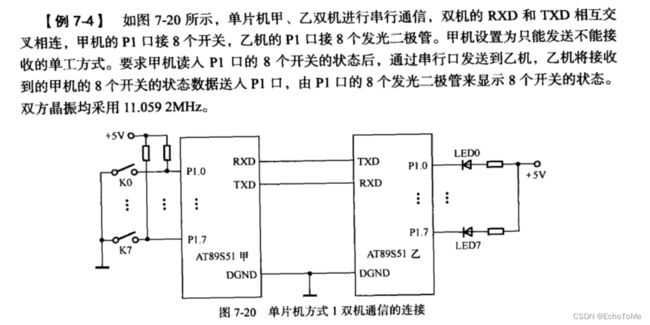
#include 单片机向计算机发送数据(重点)

#include 单片机接收计算机发送的数据(重点)

#include 数码管的实现(重点)
#include 矩阵键盘的实现(重点)
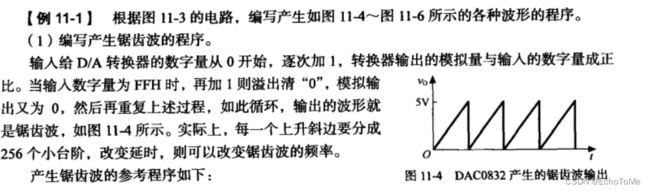
#include DAC0832输出锯齿波
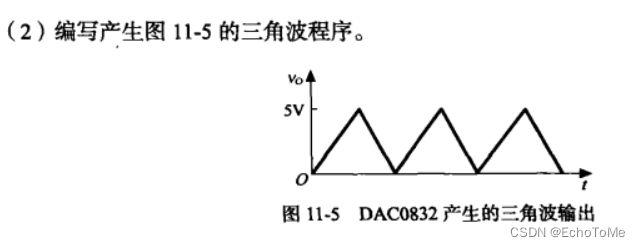
#include DAC0832输出三角波
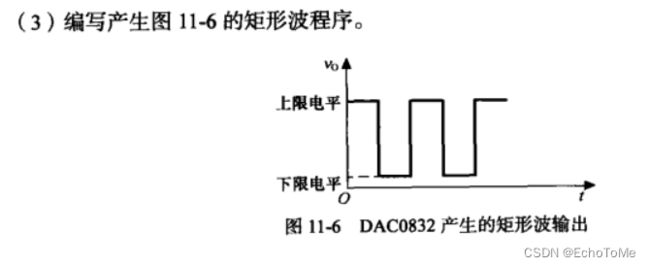
#include DAC0832输出矩形波
#include ADC转换

#include