自动驾驶中的传感器
目录
摄像头
激光雷达
毫米波雷达
惯性传感器(IMU)
超声波雷达
声明
-
摄像头
对比Radar、Lidar、Sonar来讲,Camera最接近人眼识别原理,在自动驾驶传感器中担任重要角色。摄像头可以拥有较广的视场角、较大的分辨率,还可以提供颜色和纹理等信息。这些信息对于实现自动驾驶功能是存在很大帮助的。
摄像头是将光学组件获得的光信号,投射到图像传感器上,完成由光信号到电信号的转换,然后再转换为数字图像信号,最后进行信号的算法处理。基于图像数据从而实现感知车辆周边路况的功能,实现如车辆、行人、车道线、交通标识物的检测、距离估计等模块。
目前的自动驾驶功能摄像头一般有12-13个,按照功能进行分类,分别用于环视、侧视、前视和后视。环视摄像头一般用于低速泊车;侧视摄像头用于补充后方盲区的监测,探测变道和并入主路;前视摄像头主要用于高速和低速的自动驾驶;后视摄像头则主要用于复杂环境下的泊车。
摄像头由以下几部分组成:
1.光学组件:也叫镜头组件(lens),是由镜片、滤光片、保护膜等组成;
2.CMOS 图像传感器:也叫感光元件,简称 CIS,是模拟电路和数字电路的集成,是摄像头最基础,也是最重要的模块,主要由四部分构成:
◆ 微透镜:具有球形表面和网状透镜,光通过微透镜时,CIS 的非活性部分负责将光收集起来并将其聚焦到彩色滤光片;
◆ 彩色滤光片(CF):拆分反射光中的 RGB 成分,并通过感光元件形成 Bayer 阵列*滤镜
◆ 光电二极管(PD):光电转换器件,将光信号转换为电信号,一般采用 PIN 二极管或者PNV 结器件制成;
◆ 像素设计:通过CIS 上装有的有源像素传感器(APS)实现。一般APS 由3-6 个晶体管构成,将电信号转换为数字图像信号。
摄像头分类
按照安装位置不同可分为前视摄像头、后视摄像头、侧面摄像头、全景摄像头、DMS摄像头等 按照镜头数可分为单目、双目、三目 等 按照FOV角度可分为广角、鱼眼摄像头等
基于车载摄像头的视觉传感系统的大致如下:
1. 图像处理:将图片信息转化为二维数据;
2. 模式识别:通过图像匹配进行识别;
3. 距离测量:利用物体的运动模式或双目定位,估算目标物体与本车的相对距离和相对速度,实现测距;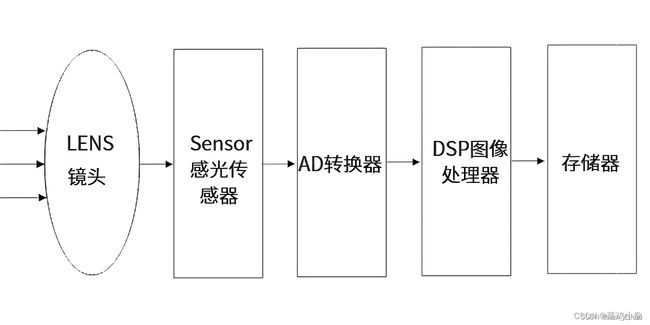
-
激光雷达
激光雷达 LiDAR(Light Detection And Ranging)是一种主动式的现代光学遥感技术。它集激光、全球定位系统(GPS)和惯性导航系统(INS)三种技术于一身,是传统雷达技术与现代激光技术相结合的产物,它被用于获得点云数据并生成精确的数字化三维模型。上述三种技术的结合,可以在一致绝对测量点位的情况下获取周围的三维实景 。
激光具有高亮度性、高方向性、高单色性和高相干性等特点,因此激光雷达具有一系列独特的优点:角分辨率高、距离分辨率高、速度分辨率高、测速范围广、能获得目标的多种图像、抗干扰能力强。同时激光雷达的体积和重量都比微波雷达小,使用方便灵活。同时随着超短脉冲激光技术、高灵敏度的信号探测和高速数据采集系统的发展和应用,激光雷达以它的高测量精度、精细的时间和空间分辨率以及大的探测跨度而成为一种重要的主动遥感工具。
运用于自动驾驶的激光雷达可以识别物体距离,且精度很高。但它也存在一定缺点:①不能识别红绿灯颜色,交通标识牌上的文字,图片。②识别距离近,几十米,再远就要加大功率,而且对人体有伤害。③对人眼等特殊部位有伤害。④精度容易受雨雪(空气中的悬浮物)的影响,容易受自然光或是热辐射的影响,在自然光强烈或是辐射区域的时候,激光雷达会被削弱很多。
-
毫米波雷达
毫米波雷达,顾名思义,就是工作在毫米波(Millimeter wave,频率30~300GHz,波长1-10mm)波段的雷达。英文名为Radar(Radio Detection and Ranging),即无线电探测和测距;
与普通雷达相似,Radar通过发射无线电信号并接收反射信号来测量自车与障碍物之间的距离和相对速度。毫米波雷达兼具微波雷达和光电雷达的一些优点,非常适合于自动驾驶汽车领域的应用;由于毫米波雷达具有较好的穿透性,能轻松穿透塑料材质的保险杠或标牌,因此常被安装在汽车保杠或标牌后面。
车载毫米波雷达通过发射电磁波信号(毫米波波段)并接收回波信号来测定汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,完成合理决策,减少事故发生率。其中测速可以直接根据发射波和回波的多普勒频移获得,而测距无法直接获得(以脉冲波为例,30m目标往返时间2×10^-7s,对芯片处理速度的要求很高),因此目前主要通过FMCW调频连续波的发射和回波信号联合解算进行测距和测试。
毫米波雷达主要运用多普勒效应:物体辐射的波长因为波源和观测者的相对运动而产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高(蓝移blue shift);在运动的波源后面时,会产生相反的效应。波长变得较长,频率变得较低(红移red shift);波源的速度越高,所产生的效应越大。根据波红(或蓝)移的程度,可以计算出波源循着观测方向运动的速度。
毫米波雷达相较激光雷达而言,对人眼没有伤害,且雨雪雾天气对其影响很有限。但是其数据稳定性较差,其相对精度没有激光雷达高,且识别范围没有旋转式激光雷达大。
总结上述二者而言,Lidar可以直接测距,且测距精度高,障碍物识别方面性能突出,但无法在恶劣天气条件下工作,比如雨雾天气;而毫米波雷达可以直接测速,成本低,尺寸小。因此,Radar和Lidar可以很好的作为互补,确保ADAS行车安全。
-
惯性传感器(IMU)
惯性测量单元,Inertial Measurement Unit(IMU),俗称惯性传感器,主要用来检测和测量加速度与旋转运动的传感器。主要是采用惯性定律实现的。
车载惯性传感器,又称为Micro-Electro-Mechanical-System,即MEMS,是汽车传感器的主要部分,其主要由3个轴加速计和3个角速度计(陀螺仪)组成,加速度计检测物体在载体坐标系独立三轴的加速度信号,陀螺仪检测载体相对导航系统坐标系的角速度信号。加速度计和陀螺仪安装在相互垂直的测量轴上,通过算法对信号进行处理后,便可计算出物体的姿态。

IMU提供的是一个相对的定位信息,其作用是测量相对于起点物体所运动的路线,所以IMU不能提供所在的具体位置信息,所以经常和GPS一起使用当在某些GPS信号微弱时,IMU就可以帮助汽车获得绝对位置的信息。
对于自动驾驶来说,高精定位是必须的,高精度定位有两层含义:
1)自车与周围环境之间的相位位置,即相对定位;
2)自车的精确经纬度,即绝对定位。
GPS可以为车辆提供精度为米级的绝对定位,差分GPS或者RTK GPS可以为车辆提供厘米级的绝对定位,但并非所有路段所有时间都能够得到良好的GPS信号。所以一般需要RTK GPS的输出与IMU、车身传感器(轮速计、方向盘转角传感器等)进行融合。
无人车使用的一般是中低级的惯性传感器。其特点是更新频率高(1KHz),可以提供实时位置信息。但是惯性传感器的致命缺点是它的误差会随着时间的推进而增加,所以我们只能在很短的时间内依赖惯性传感器进行定位。
-
超声波雷达
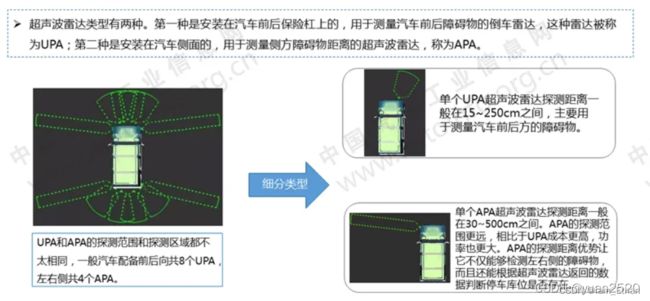
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用探头的工作频率有 40kHz, 48kHz 和 58kHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用 40kHz 的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在 0.1-3 米之间,而且精度较高,因此非常适合应用于泊车。

超声波雷达主要分为两类: UPA超声波雷达:探测距离一般在15-250cm之间,主要用于测量汽车前后方的障碍物。
APA超声波雷达:探测距离一般在30-500cm之间。相对于UPA成本更高。功率更大。
超声波雷达在自动驾驶中具有特殊的优势:超声波的能量消耗较缓慢,在介质中传播的距离比较远,穿透性强,测距的方法简单,成本低。
但同时也具有一定的劣势:超声波雷达在速度很高情况下测量距离有一定的局限性,这是因为超声波的传输速度很容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
声明
本人所有文章仅作为自己的学习记录,文章内容主要是对网络相关参考资料的整合。
若有侵权,联系立删!