C++并发编程 -2.线程间共享数据
本章就以在C++中进行安全的数据共享为主题。避免上述及其他潜在问题的发生的同时,将共享数据的优势发挥到最大。
一. 锁分类和使用
按照用途分为互斥、递归、读写、自旋、条件变量。本章节着重介绍前四种,条件变量后续章节单独介绍。
由于锁无法进行拷贝和转移,通常与包装器进行连用。例如:lock_guard、unique_lock。
| 包装器 | lock_guard | unique_lock | shared_lock |
| 含义 | 作用域内自动获取互斥锁,并在作用域结束时释放锁,以确保资源的安全访问。 | 管理互斥锁的获取和释放,更加灵活,可以指定解锁加锁的时间点 | 允许多个线程同时共享一个互斥锁,以提高并发性能.例如多读一写的场景 |
| 属性 | 不可移动、赋值、拷贝。必须通过构造函数初始化和析构函数销毁 | 能拷贝、赋值、移动,也可通过构造函数初始化和析构函数销毁 | 能拷贝、赋值、移动 |
| 灵活性 | 差 ,不可指定加锁解锁时间点 | 灵活,可随意更改加锁解锁时间点。还可以锁超时、不锁定、条件变量 | 灵活,可随意更改加锁解锁时间点。还可以锁超时、不锁定、条件变量 |
| 性能 | 强 | 差 | 并发,强 |
| 传入参数 | 三者都支持 adopt_lock_t:表示对象在构造的时已经被锁定,会在析构时解锁互斥量,同样用于获取锁之后将锁的所有权转移给包装器对象.
|
||
1.互斥锁
互斥锁(Mutex)是一种用于多线程编程的同步机制,用于保护共享资源的访问。它确保在任何给定时刻只有一个线程可以访问被保护的资源,从而避免数据竞争和不一致的结果。
#include
#include
#include
#include
#include
using namespace std;
mutex coutMutex;
void function(int i)
{
thread::id threadId = this_thread::get_id();
{
lock_guard lock(coutMutex);
cout<<"my thread id:"< threads;
for(int i = 0; i < 30; i++)
{
threads.push_back(thread(function, i));
}
for_each(threads.begin(), threads.end(), [](thread &t){t.join();});
}
当一个线程获得了互斥锁后,其他线程将被阻塞,直到该线程释放锁。这样可以确保在任何时刻只有一个线程可以执行临界区(对共享资源的访问代码段),从而避免了多个线程同时修改共享资源而导致的问题。
2.递归锁
递归锁(Recursive Lock)是一种特殊类型的互斥锁,它允许同一个线程多次获取锁而不会导致死锁。在多线程环境中,递归锁可以避免同一个线程在递归调用中对同一个资源进行重复加锁而导致的死锁情况。
递归锁内部维护了一个锁计数器,当一个线程第一次获取递归锁时,计数器加1,并且线程可以继续执行临界区代码。当同一个线程再次获取递归锁时,计数器再次加1,而不会被阻塞。只有当线程释放了与获取次数相匹配的锁时,计数器才会递减。只有当计数器为0时,其他线程才能获取该锁。
递归锁的使用场景通常是在一个函数或方法中需要递归调用自身,并且在每次递归调用中需要对共享资源进行加锁保护。递归锁允许同一个线程在递归调用中多次获取锁,确保了对共享资源的安全访问。
#include
#include
std::recursive_mutex myMutex;
void foo(int val) {
std::lock_guard lock(myMutex);
// 访问共享资源
std::cout << "Value: " << val << std::endl;
// 可以递归地再次锁定同一个 mutex
if (val > 0) {
foo(val - 1);
}
}
int main() {
foo(3);
return 0;
} 
3.读写锁
shared_mutex是一种多线程同步机制,用于实现读写锁。它允许多个线程同时访问共享资源,但在写操作期间会独占资源,以确保数据的一致性和完整性。
shared_mutex提供了两种操作:共享访问和独占访问。
在共享访问模式下,多个线程可以同时读取共享资源,而不会互相干扰。这对于读取频繁、写入较少的场景非常有用,可以提高并发性能。
而在独占访问模式下,只有一个线程可以获得对共享资源的写权限,其他线程必须等待写操作完成后才能继续执行。这样可以保证在写操作期间,不会有其他线程读取或写入资源,从而确保数据的一致性。
#include
#include
#include
#include
std::shared_mutex mutex;
int sharedData = 0;
void readerThread() {
while (true) {
std::shared_lock lock(mutex); // 共享锁定
std::cout <<"this thread id:"< lock(mutex); // 独占锁定
sharedData++;
std::cout << "Writer Thread: " << sharedData << std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(1000));
}
}
int main() {
std::thread reader1(readerThread);
std::thread reader2(readerThread);
std::thread writer(writerThread);
reader1.join();
reader2.join();
writer.join();
while(1)
std::this_thread::sleep_for(std::chrono::milliseconds(2000));
return 0;
} 4.自旋锁
自旋锁是一种基本的同步机制,用于保护共享资源,它使用忙等待的方式来实现线程的同步。当一个线程尝试获取自旋锁时,如果锁已经被其他线程占用,那么该线程会一直在一个循环中自旋等待,直到锁被释放。
优点:1)线程占用锁的时间非常短,短到不值得进行线程上下文切换的开销。
2)不会导致线程阻塞,避免了线程切换的开销。
缺点:自旋等待期间,线程会一直占用CPU资源,如果自旋等待时间过长,会浪费CPU资源
适用场景:
1)线程占用锁的时间非常短,短到不值得进行线程上下文切换的开销。
2)锁的占用时间较短,大部分情况下能够立即获取到锁。
class spinlock_mutex
{
spinlock_mutex():spinMutex(ATOMIC_FLAG_INIT){}
void lock()
{
while(spinMutex.test_and_set(std::memory_order_acquire)); //读之前保证变量最新
}
void unlock()
{
spinMutex.clear(std::memory_order_release); //写之前保证变量最新
}
private:
std::atomic_flag spinMutex;
};在后续第七章节会结合内存序列进行详细介绍。
二. 死锁的原因
线程1先锁定mutex1,线程2先锁定mutex2.都需要等待对方释放锁权限,造成死锁.如下:
#include
#include
#include
#include
#include
std::mutex mutex1;
std::mutex mutex2;
void threadFunction1() {
std::unique_lock lock1(mutex1);
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 延迟一下,以确保线程2也能获取锁
std::cout << "Thread 1: Trying to lock mutex2..." << std::endl;
std::unique_lock lock2(mutex2); // 尝试获取mutex2
std::cout << "Thread 1: Got both locks!" << std::endl;
}
void threadFunction2() {
std::unique_lock lock2(mutex2);
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 延迟一下,以确保线程1也能获取锁
std::cout << "Thread 2: Trying to lock mutex1..." << std::endl;
std::unique_lock lock1(mutex1); // 尝试获取mutex1
std::cout << "Thread 2: Got both locks!" << std::endl;
}
int main() {
std::thread t1(threadFunction1);
std::thread t2(threadFunction2);
t1.join();
t2.join();
return 0;
} 三. 如何避免死锁
1.使用固定顺序加锁解锁
基于第二节造成死锁的原因,可以在需要加锁的期间按照相同顺序加锁解锁,如下改动:
void threadFunction1() {
std::unique_lock lock1(mutex1);
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 延迟一下,以确保线程2也能获取锁
std::cout << "Thread 1: Locked mutex1, trying to lock mutex2..." << std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 增加延迟,增加死锁的可能性
{
std::unique_lock lock2(mutex2); // 尝试获取mutex2
std::cout << "Thread 1: Got both locks!" << std::endl;
}
}
void threadFunction2() {
std::unique_lock lock1(mutex1);
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 延迟一下,以确保线程1也能获取锁
std::cout << "Thread 2: Locked mutex1, trying to lock mutex2..." << std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(1)); // 增加延迟,增加死锁的可能性
{
std::unique_lock lock2(mutex2); // 尝试获取mutex2
std::cout << "Thread 2: Got both locks!" << std::endl;
}
} 适用场景:适用于需要对多个互斥锁进行加锁且对性能要求不高的场景,并且需要确保以相同的顺序对这些锁进行加锁。
优点:实现相对简单,不需要复杂的算法和数据结构。只需要定义好资源的顺序即可。
缺点:固定顺序加锁解锁可能会降低系统的灵活性,由于多个线程都按照顺序等待锁的占用释放,可能会对系统的性能产生一定的影响。
2.使用超时锁
超时锁(Timeout Lock)是一种在多线程编程中常用的技术,用于在一段时间内尝试获取锁,如果超过指定的时间仍未成功获取锁,则放弃获取锁并执行相应的处理逻辑。
#include
#include
#include
#include
std::mutex mtx;
std::condition_variable cv;
bool isLocked = false;
bool tryLockFor(int milliseconds) {
std::unique_lock lock(mtx);
auto timeout = std::chrono::system_clock::now() + std::chrono::milliseconds(milliseconds);
while (isLocked) {
if (cv.wait_until(lock, timeout) == std::cv_status::timeout) {
return false; // 超时未获取到锁
}
}
isLocked = true;
return true; // 成功获取到锁
}
void unlock() {
std::lock_guard lock(mtx);
isLocked = false;
cv.notify_one();
}
int main() {
std::cout << "Trying to acquire lock..." << std::endl;
if (tryLockFor(2000)) {
std::cout << "Have already locked, write data" << std::endl;
unlock();
} else {
std::cout << "Failed to acquire lock within the timeout." << std::endl;
}
return 0;
}
适用并发访问共享数据结构:多个线程同时访问共享的数据结构(如链表、队列等)时,超时锁可以避免数据结构的破坏和不一致。
3.使用锁的层级结构
在一个复杂的多线程程序中,可能存在多个共享资源,每个资源都需要使用一个独立的锁进行保护。当多个线程需要同时访问多个资源时,为了避免死锁,需要按照一定的顺序获取这些锁。锁的层级结构可以通过定义锁的获取和释放顺序来实现。
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
class hierarchical_mutex
{
std::mutex internal_mutex;
unsigned long const hierarchy_value;
unsigned long previous_hierarchy_value;
static thread_local unsigned long this_thread_hierarchy_value;
void check_for_hierarchy_violation()
{
if(this_thread_hierarchy_value <= hierarchy_value)
{
throw std::logic_error("mutex hierarchy violated");
}
}
void update_hierarchy_value(int value)
{
previous_hierarchy_value=this_thread_hierarchy_value;
this_thread_hierarchy_value=hierarchy_value;
std::cout<<"update_hierarchy_value "<<"previous_hierarchy_value "< 运行结果:

分析:
- 线程1运行 m1.lock(1);进行低层次枷锁,同时线程2运行 m2.lock(2);进行高层次加锁。
- 此时线程1运行到m2.lock(1);,准备进行低层次加锁
- 发现之前已经被加过锁了,锁是高层次锁。因此抛出异常。 通过这种方式避免嵌套锁导致死锁的发生
4.转移锁的所有权
转移锁的所有权是指将一个互斥锁(mutex)从一个线程转移到另一个线程,使得新的线程可以继续使用该锁。
#include
#include
#include
#include
#include
#include
#include
#include
std::mutex some_mutex;
void prepare_data(){std::cout<<"prepare_data"< get_lock()
{
extern std::mutex some_mutex;
std::unique_lock lk(some_mutex);
prepare_data();
return lk; // 1
}
void process_data()
{
std::unique_lock lk(get_lock()); // 2
do_something();
}
int main()
{
std::unique_lock main_lock(get_lock()); // 获取互斥量所有权
std::cout << "Main thread is doing something..." << std::endl;
// 在进入 process_data 函数之前释放互斥量的所有权
main_lock.unlock();
// 在 process_data 函数中获取互斥量的所有权
process_data();
// 在 process_data 函数返回后重新获取互斥量的所有权
main_lock.lock();
return 0;
} 优点:
减少锁的竞争:当一个线程完成了对共享资源的操作后,可以将锁的所有权转移到下一个需要访问共享资源的线程,避免了其他线程之间的锁竞争,提高了并发性能。
减少上下文切换:转移锁的所有权可以避免线程在释放锁后重新竞争锁的过程,从而减少了不必要的上下文切换,提高了系统的响应性能。
缺点:转移锁的所有权需要额外的代码来管理锁的状态和转移过程,增加了代码的复杂性和维护成本。
四. 粗锁和细锁适用差别
锁的粒度是指在并发编程中,锁定共享资源的范围大小,锁的粒度对程序性能有着重要的影响。
较粗粒度的锁会锁定较大范围的共享资源,这意味着在并发访问时,只有一个线程能够访问该资源,其他线程需要等待。这种情况下,锁的争用会增加,可能导致线程间的竞争和等待时间增加,从而降低程序的性能。相反,较细粒度的锁会锁定较小范围的共享资源,这意味着并发访问时,多个线程可以同时访问不同的资源,减少了锁的争用。这种情况下,线程间的竞争和等待时间减少,从而提高了程序的性能。
通常情况下,应该尽量使用细粒度的锁,以最大程度地减少锁的争用,提高并发性能。但是,过细的锁粒度也可能导致锁的开销增加,因此需要在实际应用中进行权衡和测试,找到合适的锁粒度
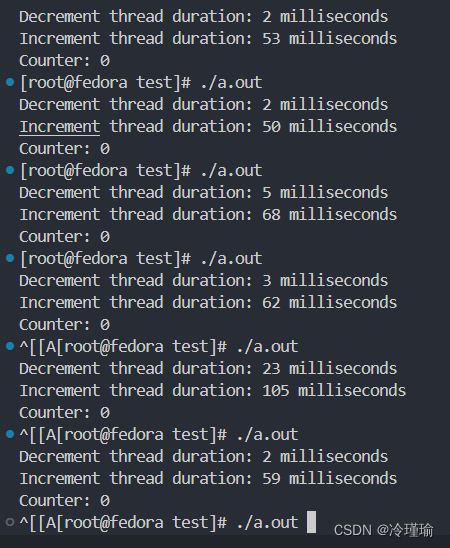
以下展示适用一种粗锁提升性能的场景:
#include
#include
#include
#include
std::mutex mtx; // 全局互斥量
int counter = 0;
void increment() {
auto start = std::chrono::high_resolution_clock::now(); // 记录开始时间
for (int i = 0; i < 1000000; ++i) {
mtx.lock(); // 细粒度锁
counter++;
mtx.unlock(); // 细粒度锁
}
auto end = std::chrono::high_resolution_clock::now(); // 记录结束时间
auto duration = std::chrono::duration_cast(end - start); // 计算运行时间
std::cout << "Increment thread duration: " << duration.count() << " milliseconds" << std::endl;
}
void decrement() {
auto start = std::chrono::high_resolution_clock::now(); // 记录开始时间
mtx.lock(); // 粗粒度锁
for (int i = 0; i < 1000000; ++i) {
counter--;
}
mtx.unlock(); // 粗粒度锁
auto end = std::chrono::high_resolution_clock::now(); // 记录结束时间
auto duration = std::chrono::duration_cast(end - start); // 计算运行时间
std::cout << "Decrement thread duration: " << duration.count() << " milliseconds" << std::endl;
}
int main() {
std::thread t1(increment);
std::thread t2(decrement);
t1.join();
t2.join();
std::cout << "Counter: " << counter << std::endl;
return 0;
} 测量多次结果:
五. 构建线程安全的栈
1.异常发生在接口处
有时候我们可以将对共享数据的访问和修改聚合到一个函数,在函数内加锁保证数据的安全性。但是对于读取类型的操作,即使读取函数是线程安全的,但是返回值抛给外边使用,存在不安全性。比如一个栈对象,我们要保证其在多线程访问的时候是安全的,可以在判断栈是否为空,判断操作内部我们可以加锁,但是判断结束后返回值就不在加锁了,就会存在线程安全问题。
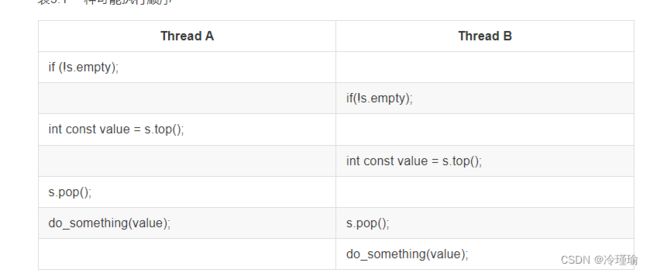
比如我定义了如下栈, 对于多线程访问时判断栈是否为空,此后两个线程同时出栈,可能会造成崩溃,因为两个线程运行顺序可能如下:
template
class threadsafe_stack1
{
private:
std::stack data;
mutable std::mutex m;
public:
threadsafe_stack1() {}
threadsafe_stack1(const threadsafe_stack1& other)
{
std::lock_guard lock(other.m);
data = other.data;
}
threadsafe_stack1& operator=(const threadsafe_stack1&) = delete;
void push(T new_value)
{
std::lock_guard lock(m);
data.push(std::move(new_value));
}
T pop()
{
std::lock_guard lock(m);
auto element = data.top();
data.pop();
return element;
}
bool empty() const
{
std::lock_guard lock(m);
return data.empty();
}
}; 线程1和线程2先后判断栈都不为空,之后执行出栈操作,可能会造成崩溃。
void test_threadsafe_stack1() {
threadsafe_stack1 safe_stack;
safe_stack.push(1);
std::thread t1([&safe_stack]() {
if (!safe_stack.empty()) {
std::this_thread::sleep_for(std::chrono::seconds(1));
safe_stack.pop();
}
});
std::thread t2([&safe_stack]() {
if (!safe_stack.empty()) {
std::this_thread::sleep_for(std::chrono::seconds(1));
safe_stack.pop();
}
});
t1.join();
t2.join();
} 针对可能造成栈区异常,可以适当抛出异常来提醒。例如定义一个空栈函数,代码优化如下:
struct empty_stack : std::exception
{
const char* what() const throw();
};
T pop()
{
std::lock_guard lock(m);
if (data.empty()) throw empty_stack();
auto element = data.top();
data.pop();
return element;
} 2.异常发生在栈分配
但是现在仍然还有可能存在问题,假设有一个stack,vector是一个动态容器,当你拷贝一个vetcor,标准库会从堆上分配很多内存来完成这次拷贝。当这个系统处在重度负荷,或有严重的资源限制的情况下,这种内存分配就会失败,所以vector的拷贝构造函数可能会抛出一个std::bad_alloc异常。当vector中存有大量元素时,这种情况发生的可能性更大。当pop()函数返回“弹出值”时(也就是从栈中将这个值移除),会有一个潜在的问题:这个值被返回到调用函数的时候,栈才被改变;但当拷贝数据的时候,调用函数抛出一个异常会怎么样? 如果事情真的发生了,要弹出的数据将会丢失;它的确从栈上移出了,但是拷贝失败了!
3.避免竞争方法
3.1 传入引用使得操作原子化
void pop(T& value)
{
std::lock_guard lock(m);
if(data.empty()) throw empty_stack();
value=data.top();
data.pop();
} 既然要传入引用, 大部分情况下需要临时构造出一个堆中类型的实例,用于接收目标值。从时间和资源的角度上来看都不划算
3.2 返回弹出元素的指针
std::shared_ptr pop()
{
std::lock_guard lock(m);
if(data.empty()) throw empty_stack();
std::shared_ptr const res(std::make_shared(data.top()));
data.pop();
return res;
} 直接pop出智能指针类型,这样在pop函数内部减少了数据的拷贝,防止内存溢出,其实这做法确实是相比之前直接pop固定类型的值更节省内存,运行效率也好很多。
六. 保护共享数据的初始化过程
1.早期局部静态的问题
当一个函数中定义一个局部静态变量,那么这个局部静态变量只会初始化一次,就是在这个函数第一次调用的时候,以后无论调用几次这个函数,函数内的局部静态变量都不再初始化。
那我们可以利用局部静态变量这一特点实现单例. 在C++11 以前存在多线程不安全的情况,编译器可能会初始化多个静态变量。但是C++11推出以后,各厂商优化编译器,能保证线程安全。所以为了保证运行安全请确保使用C++11以上的标准。
2.延迟初始化
下述示例中,延时系统资源初始化过程,存在这样一个问题:在多线程情况下,可能同时满足if(!resource_ptr)条件导致数据多次重复初始化,为了解决这一问题,使用 双重检查锁定模式。
std::shared_ptr resource_ptr;
void foo()
{
if(!resource_ptr)
{
resource_ptr.reset(new some_resource); // 1
}
resource_ptr->do_something();
}
3.双重检查锁定模式
在下述锁中,先判断资源是否被初始化,如果为被初始化,则通过2步骤加锁,使得别的线程无法进行资源初始化,然后再次进行判断,防止等锁期间资源进行被初始化。
std::shared_ptr resource_ptr;
std::mutex resource_mutex;
void foo()
{
if(!resource_ptr)
{
std::lock_guard lock(resource_mutex); // 2
if(!resource_ptr)
{
resource_ptr.reset(new some_resource); // 3
}
}
resource_ptr->do_something();
} 但是双重锁定也存在潜在问题:
在双重锁定模式中,一个线程可能在第一个条件判断中检查到 resource_ptr 为null,并认为资源尚未初始化。然后,在另一个线程中,资源被成功初始化(操作③),但这个修改可能仅存在于初始化线程的缓存中,尚未同步到主内存。 因此,第一个线程可能无法看到这个修改,仍然认为资源没有初始化, 调用 do_something() 的问题:如果第一个线程继续调用 do_something()(操作④),它可能会使用一个尚未初始化的资源,这会导致不正确的结果。 这是因为第一个线程无法正确看到第二个线程对 some_resource 实例的修改。
4.使用once_flag+call_once确保初数据竞争
std::shared_ptr resource_ptr;
std::once_flag resource_flag;
void initialize_resource()
{
resource_ptr.reset(new some_resource);
}
void foo()
{
std::call_once(resource_flag, initialize_resource);
resource_ptr->do_something();
} 引入了一个std::once_flag对象resource_flag,用于标记资源是否已经被初始化。initialize_resource函数用于实际初始化资源。在foo函数中,使用std::call_once来保证initialize_resource函数只会被调用一次。这样就可以避免多个线程同时初始化资源的问题,从而实现线程安全。
5.静态局部实例
相对于call_once,使用静态局部变量来保证第一次调用初始化,保证线程安全。
优点:直观+开销小+不依赖标准库+移植性强
#include
#include
#include
class Singleton {
public:
static Singleton& getInstance() {
if (instance == nullptr) {
std::lock_guard lock(mutex); // 加锁
if (instance == nullptr) {
instance = new Singleton();
}
}
return *instance;
}
private:
Singleton() { std::cout << "Singleton" << std::endl; } // 构造函数私有化,确保不能直接实例化
static Singleton* instance;
static std::mutex mutex;
};
Singleton* Singleton::instance = nullptr;
std::mutex Singleton::mutex;
int main() {
std::thread t1([](){
Singleton& s1 = Singleton::getInstance();
std::cout << "Thread 1: " << &s1 << std::endl;
});
std::thread t2([](){
Singleton& s2 = Singleton::getInstance();
std::cout << "Thread 2: " << &s2 << std::endl;
});
t1.join();
t2.join();
return 0;
} 静态局部实例和静态全局实例区别:
静态局部实例:静态局部变量是在函数内部声明的静态变量,它们的初始化只会在第一次进入包含它们的函数时进行,然后在程序的生命周期内保持其状态。这是因为编译器会生成代码来确保只在第一次进入函数时初始化它们,而后续调用不会再次初始化。
静态全局实例:静态全局变量是在全局作用域内声明的静态变量,它们的初始化在程序启动时进行,由C++运行时系统管理。在多线程环境中,如果多个线程同时访问静态全局变量,可能会导致竞争条件,从而导致多次初始化。