- Flutter开发者 3.29版本关注要点
2501_91395209
httpudphttpswebsocket网络安全网络协议tcp/ip
哈喽,我是老刘Flutter3.29已经发布有一段时间了,老刘写Flutter代码已经6年多,对这种例行的Flutter版本更新基本上已经是内心毫无波澜。不过最近有不少朋友问要不要更新到最新版,这里罗列一下从开发者角度看比较重要的更新,大家自己判断。一、架构与性能优化Dart代码执行线程调整Dart代码现直接在Android/iOS的主线程运行,减少了线程切换开销,但需注意可能加剧平台UI线程的负
- Android Binder与AIDL与Service使用案例及分析
曹小满2579
Android基础androidbinderAndroidIPC
水一篇以前写的文章Binder是Android内置的一种比较高效的跨进程机制,它很复杂,也很好用,可以让我们像调用普通方法那样完成跨进程式方法调用和数据传递。我们现在只需要知道它比较复杂以及怎么使用即可。ALDL全名AndroidinterfaceDefinitionLanguage,是Android官方提供的简化Binder开发的工具,适用于Java、Kotlin开发。所以很明显了,ALDL是小
- HarmonyOS-ArkUI 手势系列4--多层级手势
曹小满2579
HarmonyOS学习笔记HarmonyOSharmonyos华为ArkUIArkTs
HarmonyOS-ArkUI手势系列1--API分析及使用方式及示例-CSDN博客HarmonyOS-ArkUI手势系列2--单一手势(长按,拖拽,滑动,旋转,捏合)-CSDN博客HarmonyOS-ArkUI手势系列3--组合手势-CSDN博客什么是多层级手势就是父容器和子组件都有手势监听的情况,叫做多层级手势。VSAndroid如果您没有Android研发经验,可以略过此处。本节主要是讲鸿蒙
- android python ide_轻量级Python IDE : Thonny
weixin_39673037
androidpythonide
1.简介Thonny是基于python内置图形库tkinter开发出来的支持多平台(windows,Mac,Linux)的pythonIDE,支持语法着色、代码自动补全、debug等功能,如果你正在寻找一种“轻量级”的pythonIDE,那么可以试一试Thonny。2.安装有两种方式可以安装Thonny,从官网下载exe文件,然后安装,或者直接使用pip安装。2.1从exe文件安装进入Thonny
- Android xposed 安装教程
口袋安少
android
AndroidXposed安装教程Xposed框架是一个强大的工具,它可以让开发者和高级用户在Android设备上进程地修改应用程序而不需要修改APK文件。本文将教你如何在Android设备上安装Xposed框架。我们将详细介绍整个过程,并提供每一步需使用的代码及其解释。安装流程概览安装Xposed框架的步骤如下:步骤描述步骤1确认设备已root步骤2下载并安装XposedInstaller应用步
- Android 安装使用教程
小奇JAVA面试
安装使用教程android
一、Android开发简介Android是Google推出的基于Linux内核的开源操作系统,广泛用于智能手机、平板等移动设备。开发Android应用主要使用Java或Kotlin编程语言,并借助AndroidStudio作为官方IDE。二、安装Android开发环境2.1安装JDK(JavaDevelopmentKit)Android开发需要安装JDK(推荐JDK11或17):下载地址:http
- 如何将 Android 手机备份到 PC
Digitally
数据管理android智能手机
我们通常在Android手机上存储许多有用的数据。如果您不想因意外而丢失数据,可以将Android手机备份到PC。然而,将如此多的文件从手机备份到电脑上并不容易。如果您想轻松完成备份,请阅读本文,并按照以下方法操作。您会发现备份非常有效。方式一:使用iReaShareAndroidManager将Android手机备份到电脑iReaShareAndroidManager为您提供一键备份功能,让您可
- Kotlin MultiPlatform(KMP)
努力让我的博客服务于每一个人
kotlin开发语言跨端
KotlinMultiPlatform1.KMP是什么KotlinMultiplatform是一个工具,它让我们用同一种编程语言(Kotlin)写代码,这些代码可以同时在不同的设备上运行,比如手机、电脑和网页。这样做可以节省时间,因为你不需要为每种设备重复写相同的功能。2.有什么特性特性1:代码共享–可以编写一次逻辑代码,比如一个计算函数,然后在Android和iOS应用中都使用它。特性2:平台特
- android Launcher3横屏模式去除HOTSEAT
通信侠
android
对于Launcher3进行去抽屉式定制功能后(请参考:去抽屉式定制),现有项目整体横屏,导致部分定制失效。本文通过对Launcher3UI部分代码的trace研究,在横屏状态下,完成基本的适配工作。1.去除HOTESAT在privatevoidupdateHotseatIconSize(inthotseatIconSizePx)方法中,将hotseat整体的高度设置为0,即可不显示,无论横屏还是竖
- Android经典实战之跨平台开发方案:Kotlin Multiplatform vs Flutter
AntDreamer
kotlin跨平台androidkotlin开发语言flutterios
本文首发于公众号“AntDream”,欢迎微信搜索“AntDream”关注,和我一起每天进步一点点跨平台开发方案:KotlinMultiplatformvsFlutter在移动开发领域,跨平台技术的选择对于项目的性能、开发效率和最终用户体验有着深远的影响。KotlinMultiplatform(KMP)和Flutter作为两大主流的跨平台开发框架,各自具有独特的优势和局限性。本文将从多个维度对KM
- Android Soong构建系统(译)
叶羽西
Androidandroidgitee
SoongSoongisoneofthebuildsystemsusedinAndroid.Therearealtogetherthree:ThelegacyMake-basedbuildsystemthatiscontrolledbyfilescalledAndroid.mk.Soong,whichiscontrolledbyfilescalledAndroid.bp.TheupcomingBa
- Kotlin MultiPlatform 项目教程
秋玥多
KotlinMultiPlatform项目教程KotlinMultiPlatformKotlinMultiPlatformApp(Android,iOS,JVM&JS).MVVM/MVP-KotlinMultiPlatform项目地址:https://gitcode.com/gh_mirrors/ko/KotlinMultiPlatform项目介绍KotlinMultiPlatform(KMP)是
- android stdio 工程问题
盼雨落,等风起
androidstdioandroid
在Android工程中的应用的启动入口Android应用的主入口由AndroidManifest.xml中配置了MAIN+LAUNCHER的Activity决定。开发者只需两步:创建Activity并重写onCreate()方法;在Manifest中正确声明其。任何入口变更都需同步修改Manifest,避免冲突或启动失败。一、核心机制:AndroidManifest.xml的配置Android应用
- 【小米App】AndroidStudio开发打开指定网站的应用示例
Botiway
移动APPwindowskotlinandroidstudiolinuxpython
AndroidStudio开发打开指定网站的应用示例下面我将为你展示如何使用AndroidStudio创建一个简单的应用,点击按钮后打开指定的网站。1.创建新项目打开AndroidStudio选择“StartanewAndroidStudioproject”选择“EmptyActivity”模板设置项目名称(如“OpenWebsiteApp”)、包名和保存位置选择语言(Kotlin或Java,本示
- Android:手机号码归属地查询
自己开发的项目里,添加了一个简易的“手机号码归属地查询”模块,纯手撸,没有采用第三方框架。获取源码效果图:开发思路:界面实现--->获取数据--->数据处理--->界面展示具体实现:1.界面实现界面绘制比较简单,就不放代码了,其中为EditText做了几点处理:自定义背景bg_edit_selector:bg_edit_normal:bg_edit_selected:添加动画效果,简单的透明度、伸
- android实现号码归属地,Android手机号码归属地的查询
瞻云云
android实现号码归属地
一个简单的Demo,从聚合数据申请手机号码归属地数据接口;在EditText中输入待查询号码,获取号码后在子线程中使用HttpUrlconnection获取JSON数据,之后进行解析;数据获取完成后,在主线程中更新UI,显示获取的号码归属地信息。布局文件android:layout_width="match_parent"android:layout_height="match_parent"an
- android号码查询归属地,号码归属地识别-Android电话应用
倾城落雪
android号码查询归属地
题记自研的电话应用中,有两处使用了号码归属地,一处是通话记录页,一处是通话界面;那么它们是如何实现的呢?下面进行一步一步的分析。Dialer使用号码归属地通话记录页的号码归属地通过查询calls表中的Calls.GEOCODED_LOCATION字段,来进行获取号码的归属地。相关代码如下:查询:startQuery(token,null,uri,CallLogQuery._PROJECTION,s
- Android 多渠道配置
Android多包名,icon本篇文章主要记录下android下的同一工程,打包时配置不同的包名,icon,名称等信息.1:多包名首先讲述下如何配置多包名.在build.gralde的android标签下添加:productFlavors{xiaomi{applicationId“com.test.usagetest”}huawei{applicationId“com.test.usagetest
- Android 颜色百分比对照
夏沫琅琊
androidandroid
本文就是简单写个demo,打印下颜色百分比的数值.方便以后使用.1:获取透明色具体的代码如下:/***获取透明色*@parampercent*@paramred*@paramgreen*@paramblue*@return*/publicstaticintgetTransparentColor(intpercent,intred,intgreen,intblue){intalpha=Math.ro
- [Cmake-Android音视频]ffmpeg3.4软硬解码和多线程解码
[Cmake-Android]音视频总结:[Cmake-Android音视频]SDK,NDK基本介绍[Cmake-Android音视频]NDK-r14b编译ffmpeg3.4支持neon,硬解码[Cmake-Android音视频]创建支持ffmpeg3.4的项目[Cmake-Android音视频]ffmpeg3.4实现解封装[Cmake-Android音视频]ffmpeg3.4软硬解码和多线程解码
- Android 解析手机号码归属地
夏沫琅琊
androidandroid
Android解析手机号码归属地本文主要介绍下android项目中解析手机号码归属地的一种实现方式.1:libphonenumber库https://mvnrepository.com/artifact/com.googlecode.libphonenumber/geocoder/3.8仓库地址.https://github.com/google/libphonenumber/目前是在kotlin
- 排查 WebView 中 touch、click 事件失效:移动端调试过程详解
2501_91591841
httpudphttpswebsocket网络安全网络协议tcp/ip
在Web开发中,事件绑定通常是最基础的交互逻辑。然而,在移动端WebView环境下,哪怕一个普通的点击事件,也可能因为平台差异、容器限制、手势冲突等原因出现完全不同的表现。特别是在App中加载的Web页面中,我们经常会遇到以下情况:某些Android机型上点击按钮无反应;滑动过程中页面“卡住”或无法滑动;iOS设备上触发手势存在延迟或遮挡;同一DOM元素,在浏览器中能响应事件,在WebView中却
- someip工作涉及网络命令整理
1.iptables-PINPUTACCEPT//用于Android上关闭防火墙2.pfctl-d//用于QNX上关闭防火墙3.创建VLAN接口3.1iplinkiplinkaddlinkenx002432280522namefyusb.20typevlanid20ifconfigfyusb.20198.18.2.252/24up//配置VLAN接口IP并且将VLAN接口拉起来说明:iplinka
- Flutter插件ios_pod
Flutter创建插件的命令创建插件的命令fluttercreate--orgcom.plugin.demo--template=plugin--platforms=android,ios-iswift-ajavaplugin_demoOC引用swift文件.m文件中添加以下代码//以下代码实现OC调用Swift#if__has_include()#import#else//Supportproj
- android开发 执行adb shell settings命令提示没有权限
开始检查权限执行命令结束Android开发执行adbshellsettings命令权限问题解决方法概述在Android开发中,有时候我们需要通过adbshell命令来修改设备的一些参数。但是在执行adbshellsettings命令时可能会提示没有权限的问题,这时就需要进行一些处理来解决这个权限问题。解决流程下面是解决这个权限问题的流程,我们通过以下几个步骤来完成:步骤操作1检查权限2执行命令1.
- 自动驾驶技术研发适用Infortrend普安存储IEC平台
Infortrend普安存储IEC私有云平台,轻松高效应用无人驾驶技术自动驾驶汽车(例如自动驾驶出租车、无人驾驶公交)和无人驾驶飞行器(UAV)依靠摄像头、物联网传感器、雷达、GPS采集的实时数据瞬间做出决策。自动驾驶系统作为核心部分,不间断分析环境条件,应对潜在风险,确保乘客和货物运输安全。Autopilot应用程序在开发和模拟中,大数据、AI(人工智能)、ML(机器学习)等技术能否高速发挥作用
- 解决fatal: cannot make .repo/repo directory: Permission denied 问题
OneT1me
AndroidAndroid权限linuxandroid移动开发Android源码编译ubunturepo
首先第一点,权限问题是有很多种可能性的,这个方法不一定适用你的情况1.问题表现公司安排了一个ubuntu虚拟机用于编译Android源码,发现一块硬盘不够用,重新挂载了一块硬盘,发现在repoinit-uxxx的时候会提示fatal:cannotmake.repo/repodirectory:Permissiondenied,按照网上的方法什么文件夹创建是root之类的改法完全没有用。2.问题确认
- adb shell中执行system用户权限命令的方法
OneT1me
adb
做系统开发的过程中经常需要抓取一下只有system组才能拿到的信息,而这个时候一般用户使用的是user版本,问题又很难复现,这个时候刷机可能信息都没有了,所以产生了一个需求,在adbshell里面以system权限执行命令,下面提供了一个这个办法,前提是你拥有系统签名,我们开发一个程序,在AndroidManifest.xml里面配置systemuid然后在build.gradle里面加上系统签名
- git超过10MB的文件push失败怎么解决
m0_53365315
git
#1.确保已安装并初始化LFSgitlfsinstall#2.扫描出所有>10M的文件,并一一trackfindfilesForAndroid-typef-size+10M-print0\|xargs-0-n1gitlfstrack#3.提交更新后的.gitattributesgitadd.gitattributesgitcommit-m"chore:LFS-trackall>10Mfilesun
- Android四大组件和六大布局
giaoho
安卓开发学习android安卓
Android四大组件和六大布局文章目录Android四大组件和六大布局Android四大组件Android六大布局1.LinearLayout(线性布局)2.RelativeLayout(相对布局)3.表格布局(TableLayout)4.网格布局(GridLayout)5.帧布局(FrameLayout)6.约束布局(**ConstraintLayout**)7.绝对布局(AbsoluteLa
- mondb入手
木zi_鸣
mongodb
windows 启动mongodb 编写bat文件,
mongod --dbpath D:\software\MongoDBDATA
mongod --help 查询各种配置
配置在mongob
打开批处理,即可启动,27017原生端口,shell操作监控端口 扩展28017,web端操作端口
启动配置文件配置,
数据更灵活
- 大型高并发高负载网站的系统架构
bijian1013
高并发负载均衡
扩展Web应用程序
一.概念
简单的来说,如果一个系统可扩展,那么你可以通过扩展来提供系统的性能。这代表着系统能够容纳更高的负载、更大的数据集,并且系统是可维护的。扩展和语言、某项具体的技术都是无关的。扩展可以分为两种:
1.
- DISPLAY变量和xhost(原创)
czmmiao
display
DISPLAY
在Linux/Unix类操作系统上, DISPLAY用来设置将图形显示到何处. 直接登陆图形界面或者登陆命令行界面后使用startx启动图形, DISPLAY环境变量将自动设置为:0:0, 此时可以打开终端, 输出图形程序的名称(比如xclock)来启动程序, 图形将显示在本地窗口上, 在终端上输入printenv查看当前环境变量, 输出结果中有如下内容:DISPLAY=:0.0
- 获取B/S客户端IP
周凡杨
java编程jspWeb浏览器
最近想写个B/S架构的聊天系统,因为以前做过C/S架构的QQ聊天系统,所以对于Socket通信编程只是一个巩固。对于C/S架构的聊天系统,由于存在客户端Java应用,所以直接在代码中获取客户端的IP,应用的方法为:
String ip = InetAddress.getLocalHost().getHostAddress();
然而对于WEB
- 浅谈类和对象
朱辉辉33
编程
类是对一类事物的总称,对象是描述一个物体的特征,类是对象的抽象。简单来说,类是抽象的,不占用内存,对象是具体的,
占用存储空间。
类是由属性和方法构成的,基本格式是public class 类名{
//定义属性
private/public 数据类型 属性名;
//定义方法
publ
- android activity与viewpager+fragment的生命周期问题
肆无忌惮_
viewpager
有一个Activity里面是ViewPager,ViewPager里面放了两个Fragment。
第一次进入这个Activity。开启了服务,并在onResume方法中绑定服务后,对Service进行了一定的初始化,其中调用了Fragment中的一个属性。
super.onResume();
bindService(intent, conn, BIND_AUTO_CREATE);
- base64Encode对图片进行编码
843977358
base64图片encoder
/**
* 对图片进行base64encoder编码
*
* @author mrZhang
* @param path
* @return
*/
public static String encodeImage(String path) {
BASE64Encoder encoder = null;
byte[] b = null;
I
- Request Header简介
aigo
servlet
当一个客户端(通常是浏览器)向Web服务器发送一个请求是,它要发送一个请求的命令行,一般是GET或POST命令,当发送POST命令时,它还必须向服务器发送一个叫“Content-Length”的请求头(Request Header) 用以指明请求数据的长度,除了Content-Length之外,它还可以向服务器发送其它一些Headers,如:
- HttpClient4.3 创建SSL协议的HttpClient对象
alleni123
httpclient爬虫ssl
public class HttpClientUtils
{
public static CloseableHttpClient createSSLClientDefault(CookieStore cookies){
SSLContext sslContext=null;
try
{
sslContext=new SSLContextBuilder().l
- java取反 -右移-左移-无符号右移的探讨
百合不是茶
位运算符 位移
取反:
在二进制中第一位,1表示符数,0表示正数
byte a = -1;
原码:10000001
反码:11111110
补码:11111111
//异或: 00000000
byte b = -2;
原码:10000010
反码:11111101
补码:11111110
//异或: 00000001
- java多线程join的作用与用法
bijian1013
java多线程
对于JAVA的join,JDK 是这样说的:join public final void join (long millis )throws InterruptedException Waits at most millis milliseconds for this thread to die. A timeout of 0 means t
- Java发送http请求(get 与post方法请求)
bijian1013
javaspring
PostRequest.java
package com.bijian.study;
import java.io.BufferedReader;
import java.io.DataOutputStream;
import java.io.IOException;
import java.io.InputStreamReader;
import java.net.HttpURL
- 【Struts2二】struts.xml中package下的action配置项默认值
bit1129
struts.xml
在第一部份,定义了struts.xml文件,如下所示:
<!DOCTYPE struts PUBLIC
"-//Apache Software Foundation//DTD Struts Configuration 2.3//EN"
"http://struts.apache.org/dtds/struts
- 【Kafka十三】Kafka Simple Consumer
bit1129
simple
代码中关于Host和Port是割裂开的,这会导致单机环境下的伪分布式Kafka集群环境下,这个例子没法运行。
实际情况是需要将host和port绑定到一起,
package kafka.examples.lowlevel;
import kafka.api.FetchRequest;
import kafka.api.FetchRequestBuilder;
impo
- nodejs学习api
ronin47
nodejs api
NodeJS基础 什么是NodeJS
JS是脚本语言,脚本语言都需要一个解析器才能运行。对于写在HTML页面里的JS,浏览器充当了解析器的角色。而对于需要独立运行的JS,NodeJS就是一个解析器。
每一种解析器都是一个运行环境,不但允许JS定义各种数据结构,进行各种计算,还允许JS使用运行环境提供的内置对象和方法做一些事情。例如运行在浏览器中的JS的用途是操作DOM,浏览器就提供了docum
- java-64.寻找第N个丑数
bylijinnan
java
public class UglyNumber {
/**
* 64.查找第N个丑数
具体思路可参考 [url] http://zhedahht.blog.163.com/blog/static/2541117420094245366965/[/url]
*
题目:我们把只包含因子
2、3和5的数称作丑数(Ugly Number)。例如6、8都是丑数,但14
- 二维数组(矩阵)对角线输出
bylijinnan
二维数组
/**
二维数组 对角线输出 两个方向
例如对于数组:
{ 1, 2, 3, 4 },
{ 5, 6, 7, 8 },
{ 9, 10, 11, 12 },
{ 13, 14, 15, 16 },
slash方向输出:
1
5 2
9 6 3
13 10 7 4
14 11 8
15 12
16
backslash输出:
4
3
- [JWFD开源工作流设计]工作流跳跃模式开发关键点(今日更新)
comsci
工作流
既然是做开源软件的,我们的宗旨就是给大家分享设计和代码,那么现在我就用很简单扼要的语言来透露这个跳跃模式的设计原理
大家如果用过JWFD的ARC-自动运行控制器,或者看过代码,应该知道在ARC算法模块中有一个函数叫做SAN(),这个函数就是ARC的核心控制器,要实现跳跃模式,在SAN函数中一定要对LN链表数据结构进行操作,首先写一段代码,把
- redis常见使用
cuityang
redis常见使用
redis 通常被认为是一个数据结构服务器,主要是因为其有着丰富的数据结构 strings、map、 list、sets、 sorted sets
引入jar包 jedis-2.1.0.jar (本文下方提供下载)
package redistest;
import redis.clients.jedis.Jedis;
public class Listtest
- 配置多个redis
dalan_123
redis
配置多个redis客户端
<?xml version="1.0" encoding="UTF-8"?><beans xmlns="http://www.springframework.org/schema/beans" xmlns:xsi=&quo
- attrib命令
dcj3sjt126com
attr
attrib指令用于修改文件的属性.文件的常见属性有:只读.存档.隐藏和系统.
只读属性是指文件只可以做读的操作.不能对文件进行写的操作.就是文件的写保护.
存档属性是用来标记文件改动的.即在上一次备份后文件有所改动.一些备份软件在备份的时候会只去备份带有存档属性的文件.
- Yii使用公共函数
dcj3sjt126com
yii
在网站项目中,没必要把公用的函数写成一个工具类,有时候面向过程其实更方便。 在入口文件index.php里添加 require_once('protected/function.php'); 即可对其引用,成为公用的函数集合。 function.php如下:
<?php /** * This is the shortcut to D
- linux 系统资源的查看(free、uname、uptime、netstat)
eksliang
netstatlinux unamelinux uptimelinux free
linux 系统资源的查看
转载请出自出处:http://eksliang.iteye.com/blog/2167081
http://eksliang.iteye.com 一、free查看内存的使用情况
语法如下:
free [-b][-k][-m][-g] [-t]
参数含义
-b:直接输入free时,显示的单位是kb我们可以使用b(bytes),m
- JAVA的位操作符
greemranqq
位运算JAVA位移<<>>>
最近几种进制,加上各种位操作符,发现都比较模糊,不能完全掌握,这里就再熟悉熟悉。
1.按位操作符 :
按位操作符是用来操作基本数据类型中的单个bit,即二进制位,会对两个参数执行布尔代数运算,获得结果。
与(&)运算:
1&1 = 1, 1&0 = 0, 0&0 &
- Web前段学习网站
ihuning
Web
Web前段学习网站
菜鸟学习:http://www.w3cschool.cc/
JQuery中文网:http://www.jquerycn.cn/
内存溢出:http://outofmemory.cn/#csdn.blog
http://www.icoolxue.com/
http://www.jikexue
- 强强联合:FluxBB 作者加盟 Flarum
justjavac
r
原文:FluxBB Joins Forces With Flarum作者:Toby Zerner译文:强强联合:FluxBB 作者加盟 Flarum译者:justjavac
FluxBB 是一个快速、轻量级论坛软件,它的开发者是一名德国的 PHP 天才 Franz Liedke。FluxBB 的下一个版本(2.0)将被完全重写,并已经开发了一段时间。FluxBB 看起来非常有前途的,
- java统计在线人数(session存储信息的)
macroli
javaWeb
这篇日志是我写的第三次了 前两次都发布失败!郁闷极了!
由于在web开发中常常用到这一部分所以在此记录一下,呵呵,就到备忘录了!
我对于登录信息时使用session存储的,所以我这里是通过实现HttpSessionAttributeListener这个接口完成的。
1、实现接口类,在web.xml文件中配置监听类,从而可以使该类完成其工作。
public class Ses
- bootstrp carousel初体验 快速构建图片播放
qiaolevip
每天进步一点点学习永无止境bootstrap纵观千象
img{
border: 1px solid white;
box-shadow: 2px 2px 12px #333;
_width: expression(this.width > 600 ? "600px" : this.width + "px");
_height: expression(this.width &
- SparkSQL读取HBase数据,通过自定义外部数据源
superlxw1234
sparksparksqlsparksql读取hbasesparksql外部数据源
关键字:SparkSQL读取HBase、SparkSQL自定义外部数据源
前面文章介绍了SparSQL通过Hive操作HBase表。
SparkSQL从1.2开始支持自定义外部数据源(External DataSource),这样就可以通过API接口来实现自己的外部数据源。这里基于Spark1.4.0,简单介绍SparkSQL自定义外部数据源,访
- Spring Boot 1.3.0.M1发布
wiselyman
spring boot
Spring Boot 1.3.0.M1于6.12日发布,现在可以从Spring milestone repository下载。这个版本是基于Spring Framework 4.2.0.RC1,并在Spring Boot 1.2之上提供了大量的新特性improvements and new features。主要包含以下:
1.提供一个新的sprin
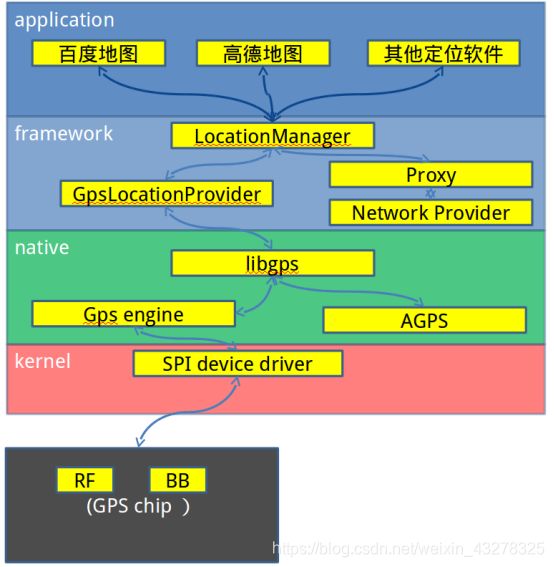
 - 3.加载NetworkProvider、GeocoderProvider、FlpHardwareProvider等Provider。NetworkProvider提供网络定位功能;GeocoderProvider提供经纬度与地址的转换,FlphardwareProvider提供包含BLE,sensor的方式获取位置,依赖于芯片能力。
- 3.加载NetworkProvider、GeocoderProvider、FlpHardwareProvider等Provider。NetworkProvider提供网络定位功能;GeocoderProvider提供经纬度与地址的转换,FlphardwareProvider提供包含BLE,sensor的方式获取位置,依赖于芯片能力。