聊聊智能巡检机器人的那些技术活儿
随着工业智能化的不断发展和推进,智能巡检机器人作为一种重要的自动化设备,正逐渐成为各行业的新宠。而在智能巡检机器人领域,超智能巡检机器人的出现,正引领着巡检技术的新风向,为未来智能化巡检开启了全新的篇章。
智能巡检机器人的崛起,标志着工业巡检方式的重大转变。传统的人工巡检工作存在着效率低下、风险高等诸多问题,而智能巡检机器人通过融合先进的感知、导航和数据分析技术,可以准确、高效地完成巡检任务,并在发现问题后提供即时的反馈和解决方案,大大提高了生产线的运行效率和稳定性。
下面,跟着我们的文章来详细了解一下智能巡检机器人到底有哪些”技术活儿“吧!
SLAM无轨导航技术

SLAM的全称为Simultaneous Localization And Mapping即(同步定位与地图构建)。机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征,定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。

目前用于SLAM的传感器主要分为激光雷达及视觉传感器两种。
激光SLAM采用单线或多线激光雷达,一般用于室内机器人及无人驾驶领域,激光雷达的出现和普及使得测量更快更准,信息更丰富。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
视觉SLAM可从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。视觉SLAM的优点是它所利用的丰富纹理信息。例如两块尺寸相同内容却不同的广告牌,基于点云的激光SLAM算法无法区别他们,而视觉则可以轻易分辨。这带来了重定位、场景分类上无可比拟的巨大优势。同时,视觉信息可以较为容易的被用来跟踪和预测场景中的动态目标,如行人、车辆等,对于在复杂动态场景中的应用这是至关重要的。
超维机器人采用了激光SLAM、RGBD相机、惯性导航相结合的综合定位导航方案,率先引入了激光雷达+深度摄像机+辅助信标的方式进行“综合性导航+避障”解决方案,达到<1°的角度精度以及±2cm级别的定位精度。
视觉目标检测算法YOLO
YOLO(You Only Look Once)是基于深度神经网络的目标检测算法,用在图像或视频中实时识别和定位多个对象。YOLO的主要特点是速度快且准确度较高,能够在实时场景下实现快速目标检测。YOLO是一种快速而准确的目标检测算法,被广泛应用于计算机视觉领域,包括实时视频分析、自动驾驶、安防监控、智能交通、缺陷检测等。
图像识别:
人们观察图像时,他们能够迅速地识别其中的物体和它们的位置。而对于机器人来说,实现自主导航训练需要类似的反应能力和准确性。系统必须能够实时分析图像或视频中的道路,并准确地检测各种类型的物体及其位置。YOLO(You Only Look Once)是一种目标检测技术,它将目标检测任务转化为一个回归问题。它将图像分割为多个网格,并对每个网格预测是否包含物体,以及物体的边界框和类别。因此,YOLO能够在单次前向传播中同时完成目标检测和分类,从而实现了实时性能
分割(Segmentation):定位像素属于哪个目标物或场景
定位(Localization):定位目标位置
分类(Classification):判定目标类别
检测(Detection):判定目标物体是什么
YOLO组成
YOLO由网络架构、基础网络、特征提取层、网格划分、边界框预测、非最大抑制和损失函数等组成,从而实现了高效而准确的实时目标检测。
网络架构:YOLO使用卷积神经网络(Convolutional Neural Network,CNN)作为基础网络架构。
基础网络:YOLO使用一个预训练的CNN作为基础网络,通常使用轻量级的神经网络框架Darknet作为默认选择(V5前),用于目标检测任务。
特征提取层:YOLO网络中的特征提取层用于从输入图像中提取有语义信息的特征图,用于目标检测和分类。
网格划分:YOLO将输入图像划分为固定大小的网格。每个网格负责检测图像中的对象,在不同的特征图上进行多尺度的网格划分,检测不同大小的对象。
边界框预测:对于每个网格,YOLO会预测多个边界框。每个边界框由一个边界框坐标和一个对象类别预测组成。边界框预测是通过回归来实现的。
非最大抑制(Non-Maximum Suppression,NMS):为了消除多个重叠的预测结果,YOLO使用非最大抑制算法。该算法会筛选出具有高置信度的预测边界框,并删除与其高度重叠的边界框。
损失函数:YOLO使用多个损失函数来训练网络。这些损失函数包括边界框回归损失、对象存在性的分类损失、类别预测的分类损失。这些损失函数用于衡量预测结果与真实标签之间的差异,并通过反向传播来更新网络参数。
激活函数:YOLO通常使用的激活函数是线性整流函数(Rectified Linear Unit,ReLU)。主要作用是引入非线性性质,使得神经网络可以学习更复杂的函数关系,以增加网络的表达能力和非线性拟合能力。
超维机器人研发团队从实际场景出发,打造出适用于各类场景的自研算法。基于卷积神经网络深度识别算法,已选目标点准确率大于96%,这使得巡检机器人在作业时可实时上传检测数据,耗时短,识别力强,老旧设备同样适用。
边缘计算
机器人边缘计算是指在机器人系统内部或附近进行数据处理、分析和决策的计算过程。相比于将数据发送到远程服务器或云端进行处理,边缘计算能够在本地或近端设备上实现实时的数据处理和响应,从而提高了系统的响应速度、降低了通信延迟,并减少了对网络带宽的需求。
在机器人领域,边缘计算可用于各种任务和应用,包括实时感知、路径规划、决策制定和控制执行等。通过在机器人本地进行计算,可以更快地对传感器数据进行处理和解释,实现更快速、更灵活的决策和行动。边缘计算还能够帮助机器人系统实现更好的安全性和隐私保护,因为敏感数据可以在本地进行处理,而不必通过网络传输。
边缘计算在智能巡检中具有广泛的应用场景,主要体现在以下几个方面:
1. 实时数据处理:边缘计算可以在巡检机器人所在的本地环境内进行实时数据处理,包括传感器数据的采集、分析和处理。通过在边缘设备上进行数据处理,可以实现更快速的响应和决策,减少数据传输延迟,提高巡检效率和准确性。
2. 实时监测和预警:边缘计算可以实时监测巡检机器人所携带的传感器数据,包括温度、湿度、压力、振动等参数。通过实时监测,可以及时发现设备异常或故障情况,并提前发出预警,以便及时采取措施进行修复或维护,避免生产事故发生。
3. 智能决策和优化路径规划:边缘计算可以根据实时监测到的数据,进行智能决策和优化路径规划。例如,在巡检过程中,根据设备状态和环境条件,智能决策机器人的移动路径,以实现最优的巡检路线和覆盖范围,提高巡检效率和覆盖率。
4.本地化数据存储和管理:边缘计算可以在本地设备上实现数据存储和管理,将重要的巡检数据保存在本地,以备日后分析和查询。同时,通过本地化存储,还可以减少对网络带宽和云端存储资源的依赖,降低数据传输成本和延迟。
5. 安全性和隐私保护:边缘计算可以在本地设备上实现数据处理和存储,避免敏感数据通过网络传输至云端,从而提高数据安全性和隐私保护水平。巡检机器人可以在本地完成数据处理和分析,将结果汇报至云端或控制中心,以确保数据的安全性和隐私性。
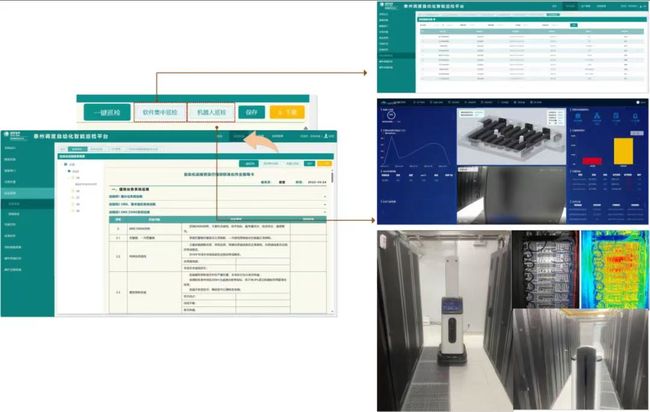
机器人调度系统——AIoT联合巡检平台

超维远程智能巡视系统通过统一接入协议实现了多种巡检设备异构接入;模块化功能集实现了百余项功能的插座式管理部署,可快速针对场景进行定制;模板化任务管理实现了配置文件化的部署,同类场景高度复用,解决了巡检系统和机器人部署周期长的问题;边缘化分析能力,提高了AI分析的实时性和可靠性。
产品优势
●统一纳管多种异构巡检设备;
巡检设备智能联合调度,实现数据联动,报警联动;
●数字孪生技术实现可视化管理;
●分布式边缘计算架构,提高巡检实时性,降低系统总线带宽需求;
支持利旧巡检设备接入,实现旧设备智能化升级。
超维机器人联合巡检平台对现场部署的多种物联网设备实现统一的监、管、控,实现多系统的统一整合,可极大提高智能运维检修和数字化资产管理的效率。
随着科技的不断发展和创新,智能巡检机器人的核心技术也在不断进化和完善。未来,我们可以期待更多先进的感知技术、深度学习算法和自主决策系统的应用,进一步提升智能巡检机器人的性能和智能化水平。为客户提供更安全、高效的巡检服务。