二值图像分析:轮廓形状逼近与拟合
二值图像分析:轮廓形状逼近与拟合
-
- 1.二值图像轮廓逼近
-
- 1.1 轮廓逼近函数
- 1.2 轮廓逼近算法原理分析
- 2.代码实践
- 3.最小外接圆拟合
- 4.最大内接圆拟合
-
- 4.1 点轮廓位置测试函数
- 4.2 获取轮廓最大内接圆
1.二值图像轮廓逼近
1.1 轮廓逼近函数
在[二值图像分析:二值图像轮廓提取],通过findContours()函数可以找到二值图像中的轮廓信息。对图像二值图像的每个轮廓,OpenCV提供了一个函数approxPolyDP()来对每个轮廓逼近它的的真实几何形状,从而通过轮廓逼近的输出结果判断一个对象是什么形状,或者得到一些其他信息。
OpenCV轮廓逼近的函数原型如下:
void cv::approxPolyDP(InputArray curve,OutputArray approxCurve,
double epsilon,bool closed)
参数介绍:
Curve:表示轮廓曲线,通常可以是findContours()中参数Contours里的元素,即一个由点集组成的轮廓。approxCurve: 可以设为vector保存轮廓逼近输出的折点。epsilon: 轮廓逼近的顶点距离真实轮廓曲线的最大距离,该值越小表示越逼近真实轮廓。close: 表示是否为闭合区域。
1.2 轮廓逼近算法原理分析
这里借用一下《学习OpenCV3》一书中的图像:
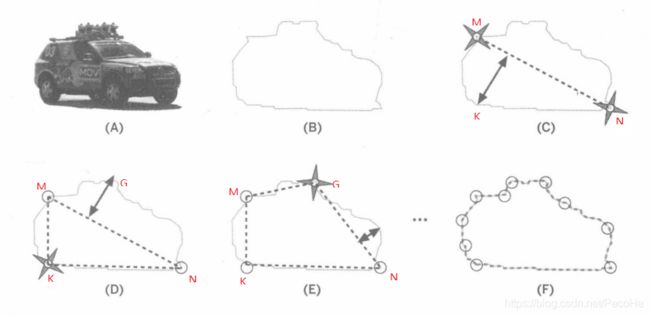
如上图,(A)为原始图像,(B)为经过一定处理后提取出来的轮廓。则轮廓逼近算法会对于该轮廓:
- 首先找到轮廓中距离最远的两个点,如图(C)中的M、N,将这2点连接,至此将轮廓逼近成了一条线段。
- 然后在原来的轮廓上找一点使得其离MN线段的距离最大,如K点,将MK,NK连接,至此将轮廓逼近成了一个三角形。
- 再在原来的轮廓上找一点使得其三角形MNK的距离最大,如G点,去除MN,将MG,NG连接,至此将轮廓逼近成了一个四边形。
- 如此反复迭代,将新的点加入到逼近的几何多边形状中去,直到轮廓上任意一点到多边形的距离小于设定的精度参数
epsilon。
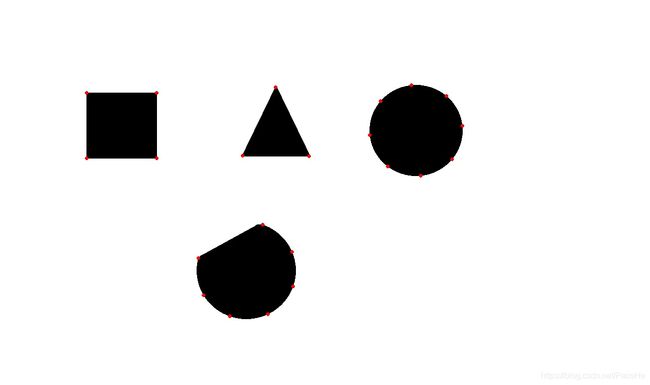
2.代码实践
#include 运行结果:
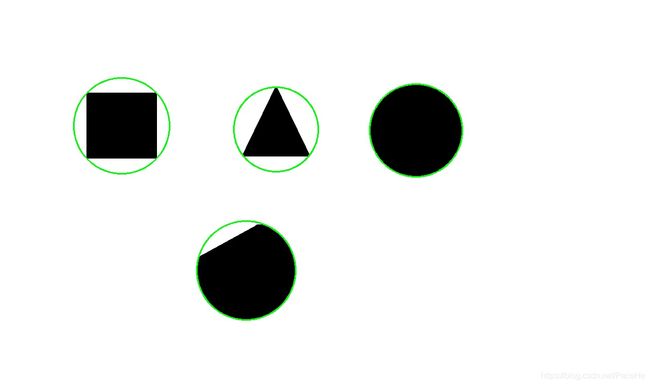
3.最小外接圆拟合
在上面的图中,下面一个圆明显缺了一角,实际应用中经常会有这样的情况,这个时候一般的圆检测算法,如霍夫圆检测就会失效。这种情况下可以使用最小包围圆逼近算法,前提是要把前景目标的轮廓弄平滑了,否则噪点会影响拟合结果。
OpenCV提供了一个函数来完成对一个轮廓的最小包围圈逼近:
void minEnclosingCircle( InputArray points,Point2f& center,
float& radius );
参数解释:
points:由点集组成的轮廓。center:输出圆心坐标。radius:输出圆的半径。
值得注意的是,C++语法不支持函数有多个返回值,所以没法将圆心坐标和半径一起返回,因此需要提前定义好坐标(Point2f类)和半径(float类型)来传递引用,作为输出型参数接收结果传递给函数。
代码实践:
#include 运行结果如下,可以看到对于不完整的圆也有很准确的检测效果:
4.最大内接圆拟合
4.1 点轮廓位置测试函数
OpenCV提供了一个函数来帮助判断一个点和轮廓的位置关系:
double pointPolygonTest( InputArray contour, Point2f pt,
bool measureDist );
该函数可以准确计算出一个点距离某个轮廓的距离,如果该点在轮廓上,返回的距离就是0;如果是在外部或者内部,则分别返回负数和正数表示距离。它的参数解释如下:
contour:点集组成的轮廓。pt:要判断的点。measureDist:设为True时返回实际点到轮廓的距离,设为False返回0(表示点在轮廓上)或者1(表示点在轮廓外)或者-1(表示点在轮廓内)三者中的一个。
4.2 获取轮廓最大内接圆
有了上面的函数之后,获取轮廓最大内接圆就很容易了。由于点轮廓测试函数返回的是点到轮廓的最短像素距离,那么我们只要扫描轮廓内部的点,找到内部点中到轮廓距离最大的点,这个距离就是最大内接圆的半径,该点就是圆心。
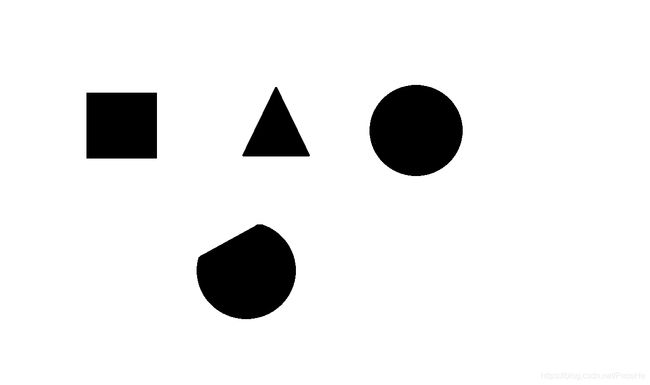
对于下面的输入图像:

代码实践:
#include 输出:
Min :-610.021,Loc:(1262,747). #输出结果右下角红点
Max :107.336,Loc:(574,345). #中心处红点
运行结果:
