在C++上如何使用OpenCV头文件是什么_用OpenCV的dnn模块调用yolov3模型

前言
在实际应用场景,我们用darknet的GPU版本训练自己的数据,得到权值文件,然后我们可以调用训练的好的模型去实现自己的检测项目。一般情况下,我们可以使用opencv的dnn模块去调用yolov3。下面大致讲解一下如何是实现调用。
一、环境准备
1、编译好darknet的GPU版本。可参考我的文章https://zhuanlan.zhihu.com/p/134347176
2、安装好opencv3.4以上的版本,我使用的是opencv3.4.0(Windows)
3、安装好VS2015
二、编写调用程序
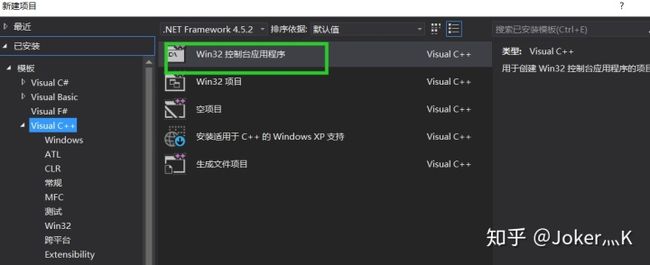
1、新建window控制台程序
2、在项目中选择release 64位,配置好opencv的头文件跟lib(自行百度)
3、右键程序,添加类
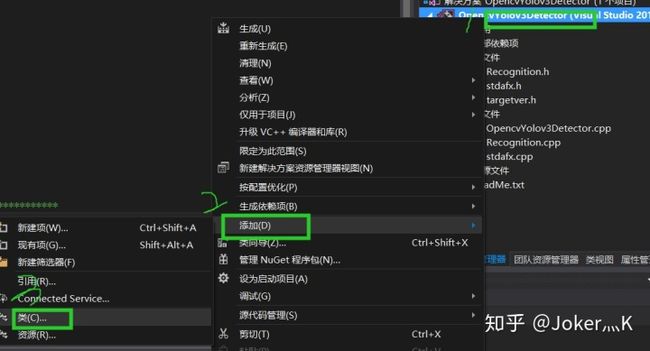
4、得到一个类的头文件和源文件

5、在头文件中添加下面代码
#pragma once
#include
#include
#include
#include
#include
#include
#include
#include
//#include
using namespace std;
using namespace cv;
using namespace dnn;
using namespace cuda;
class Recognition
{
public:
Recognition();
~Recognition();
Net InitYolov3();
void postprocess(Mat& frame, const vector& out);
std::vect getOutputsNames(const Net& net);
void Recognition::runYolov3(Net& net, Mat& frame);
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame);
private:
vectorclass_names;// Class Name
float confThreshold; // Confidence threshold
float nmsThreshold; //Non - maximum suppression threshold
int inpWidth; // Width of network's input image
int inpHeight; // Height of network's input image
}; 6、在源文件中添加下面代码
#include "stdafx.h"
#include "Recognition.h"
Recognition::Recognition()
{
confThreshold = 0.5;
nmsThreshold = 0.4;
inpWidth = 416;
inpHeight = 416;
}
Recognition::~Recognition()
{
}
/************************************************************************
函数功能:进行Yolov3的各种配置工作
输入:无
输出:返回配置好的网络
************************************************************************/
Net Recognition::InitYolov3()
{
//加载类名文件
std::string class_names_string = "F:***_projectdarknet-masterbuilddarknetx64datacoco.names";
std::ifstream class_names_file(class_names_string.c_str());
if (class_names_file.is_open())
{
std::string name = "";
while (std::getline(class_names_file, name))
{
class_names.push_back(name);
}
}
else
{
std::cout << "don't open class_names_file!" << endl;
}
//给出模型的配置和权重文件
cv::String modelConfiguration = "F:***_projectdarknet-masterbuilddarknetx64cfgyolov3.cfg";
cv::String modelWeights = "F:***_projectdarknet-masterbuilddarknetx64yolov3.weights";
// 装载网络
cv::dnn::Net net = cv::dnn::readNetFromDarknet(modelConfiguration, modelWeights);//读取网络模型和参数,初始化网络
std::cout << "Read Darknet..." << std::endl;
net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
net.setPreferableTarget(cv::dnn::DNN_TARGET_OPENCL_FP16);
return net;
}
/************************************************************************
函数功能:使用非极大值抑制方法删除低置信度的边界框
输入:frame:网络的输入图像,out:网络输出层的输出图像
输出:无
************************************************************************/
void Recognition::postprocess(Mat& frame, const vector& out)
{
std::vector confidences;
std::vector boxes;
std::vector classIds;
for (int num = 0; num < out.size(); num++)
{
double value;
Point Position;
//得到每个输出的数据
float *data = (float*data = (float *)out[num].data;
for (int i = 0; i < out[num].rows; i++, data += out[num].cols)
{
//得到每个输出的所有类别的分数
Mat sorces = out[num].row(i).colRange(5, out[num].cols);
//获取最大得分的值和位置
minMaxLoc(sorces, 0, &value, 0, &Position);
if (value > confThreshold)
{
//data[0],data[1],data[2],data[3]都是相对于原图像的比例
int center_x = (int)(data[0] * frame.cols);
int center_y = (int)(data[1] * frame.rows);
int width = (int)(data[2] * frame.cols);
int height = (int)(data[3] * frame.rows);
int box_x = center_x - width / 2;
int box_y = center_y - height / 2;
classIds.push_back(Position.x);
confidences.push_back((float)value);
boxes.push_back(Rect(box_x, box_y, width, height));
}
}
}
//执行非极大值抑制,以消除具有较低置信度的冗余重叠框
std::vector perfect_indx;
NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, perfect_indx);
for (int i = 0; i < perfect_indx.size(); i++)
{
int idx = perfect_indx[i];
Rect box = boxes[idx];
drawPred(idx, confidences[idx], box.x, box.y, box.x + box.width, box.y + box.height, frame);
}
}
/************************************************************************
函数功能:得到输出层的名称
输入:需要遍历的网络Net
输出:返回输出层的名称
************************************************************************/
std::vector Recognition::getOutputsNames(const Net& net)
{
static vector names;
if (names.empty())
{
//得到输出层的索引号
std::vector out_layer_indx = net.getUnconnectedOutLayers();
//得到网络中所有层的名称
std::vector all_layers_names = net.getLayerNames();
//在名称中获取输出层的名称
names.resize(out_layer_indx.size());
for (int i = 0; i < out_layer_indx.size(); i++)
{
names[i] = all_layers_names[out_layer_indx[i] - 1];
}
}
return names;
}
void Recognition::drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{
//Draw a rectangle displaying the bounding box
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(255, 178, 50), 3);
//Get the label for the class name and its confidence
string label = format("%.5f", conf);
if (!class_names.empty())
{
CV_Assert(classId < (int)class_names.size());
label = class_names[classId] + ":" + label;
}
//Display the label at the top of the bounding box
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
rectangle(frame, Point(left, top - round(1.5*labelSize.height)), Point(left + round(1.5*labelSize.width), top + baseLine), Scalar(255, 255, 255), FILLED);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 0, 0), 1);
}
/************************************************************************
函数功能:yolov3执行的过程
输入:yolov3的网络net,原始的图像frame
输出:无
************************************************************************/
void Recognition::runYolov3(Net& net, Mat& frame)
{
// 从一个帧创建一个4D blob
cv::Mat blob;
double start = getTickCount();
// 1/255:将图像像素值缩放到0到1的目标范围
// Scalar(0, 0, 0):我们不在此处执行任何均值减法,因此将[0,0,0]传递给函数的mean参数
blob = cv::dnn::blobFromImage(frame, 1 / 255.0, cvSize(inpWidth, inpHeight), cv::Scalar(0, 0, 0), true, false);
// 设置网络的输入
net.setInput(blob);
// 运行向前传递以获得输出层的输出
std::vector outs;
net.forward(outs, getOutputsNames(net));//forward需要知道它的结束层
// 以较低的置信度移除边界框
postprocess(frame, outs);//端到端,输入和输出
std::cout << "succeed!!!" << std::endl;
cv::Mat detectedFrame;
frame.convertTo(detectedFrame, CV_8U);
double end = getTickCount();
double time = (end - start) / getTickFrequency() * 1000;
char runtime[100];
sprintf_s(runtime, "%.2f", time); // 帧率保留两位小数
std::string fpsString("Run Time:");
fpsString = fpsString + runtime + "ms";; // 在"FPS:"后加入帧率数值字符串
//显示帧率
putText(detectedFrame, // 图像矩阵
fpsString, // string型文字内容
cv::Point(5, 20), // 文字坐标,以左下角为原点
cv::FONT_HERSHEY_SIMPLEX, // 字体类型
0.5, // 字体大小
cv::Scalar(0, 255, 0)); // 字体颜色
// 显示detectedFrame
cv::imshow("detectedFrame", detectedFrame);
waitKey(0);
}
7、然后可以在main函数下调用这个类了,代码如下
#include "stdafx.h"
#include "Recognition.h"
int main()
{
//读取图片用于检测
Mat frame = imread("C:UsersTonyDesktoptesttest1.jfif");
//初始化检测类
Recognition* recognition = new Recognition();
//初始化网络
dnn::Net net = recognition->InitYolov3();
//运行yolov3
recognition->runYolov3(net,frame);
return 0;
}8、自行下载yolov3.weights文件测试,测试效果如下(500多ms,提示说如果有intel显卡速度会更快)

后面将调用darknet生成的dll,速度比opencv要更快,更能满足要求。
最后
如果觉得文章对您有帮助的话,别忘了给我个赞,谢谢!