从0开始图形学(光栅化)
前言
说起图形学,很多人就会提到OpenGL,但其实两者并不是同一个东西。引入了OpenGL加重了学习的难度和成本,使得一些原理并不直观。可能你知道向量,矩阵,纹理,重心坐标等概念,但就是不知道这些概念在图形学中具体是怎么使用的。
本文不使用OpenGL,只用C代码实现光栅化过程,并配合OpenCV来显示渲染结果。让图形学的相关过程和原理变的直观和纯粹,本文结束后,我们将能够把一个3D模型文件只通过C语言渲染出来,如下结果。

环境准备
首先需要安装开发环境,以Windows为例(Mac使用XCode,配置方法可以网上搜索),开发工具首选Visual Studio。然后需要安装OpenCV环境,OpenCV在此只用来显示渲染结果,同时用到诸如画线和画点的简单功能,它不是必要的。参照Windows中安装OpenCV开发环境-CSDN博客
完成开发环境搭建后,创建一个控制台项目,打开main函数所在的cpp文件,输入以下代码
// CGFromZero.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include
#include
#include
const int gRstImgWid = 1000, gRstImgHei = 600; // 结果图的长宽大小
unsigned char _rstImage[gRstImgHei][gRstImgWid][3]; // 结果图
const char _backColor[3] = {50, 100, 150}; // 结果图的背景颜色
void ShowCGRst()
{
cv::Mat cvRst = cv::Mat(gRstImgHei, gRstImgWid, CV_8UC3);
for (size_t y = 0; y < gRstImgHei; ++y)
{
for (size_t x = 0; x < gRstImgWid; ++x)
{
cvRst.data[y * cvRst.step + x * cvRst.channels() + 0] = _rstImage[y][x][2]; // 这里没有错,OpenCV中的数据存储顺序是BGR,而我们的数据顺序是RGB
cvRst.data[y * cvRst.step + x * cvRst.channels() + 1] = _rstImage[y][x][1];
cvRst.data[y * cvRst.step + x * cvRst.channels() + 2] = _rstImage[y][x][0];
}
}
cv::imshow("愚 匠", cvRst);
cv::imwrite("./Chapter0.png", cvRst);
cv::waitKey(-1);
}
void CGRender()
{
}
int main()
{
// 先将结果图画上背景色
for (size_t y = 0; y < gRstImgHei; ++y)
{
for (size_t x = 0; x < gRstImgWid; ++x)
{
_rstImage[y][x][0] = _backColor[0];
_rstImage[y][x][1] = _backColor[1];
_rstImage[y][x][2] = _backColor[2];
}
}
// 渲染
CGRender();
//
// 显示渲染结果
ShowCGRst();
}
编译,运行,如果出现以下的图像,就说明环境准备就绪,我们后续的学习内容将在CGRender()这个函数上实现

第一章:从3D到2D
概念解说
图形学渲染,就是将3D的东西“画”到2D的屏幕上,和拍照的效果是一样的,这也是为什么很多3D渲染引擎会有“相机”这个概念,这一节我们来看一下怎么把3D变成2D。
场景定义
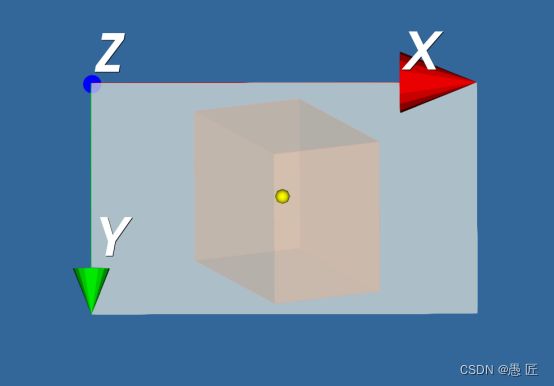
首先,我们定义一个渲染场:一个定义好的坐标系中某个3D的箱子,黄色的球体代表相机,如下图所示

我们的渲染结果就应该同相机视角看到的结果一样,如下图所示,透过半透明的“画布”,可以看到箱子在“画布”上的样子
问题提出
那么,如何实现上面效果呢?我们先从箱子的整体轮廓入手,很简单,只要将箱子的八个顶点坐标的Z轴分量去掉,找到图片上对应的[X,Y]就是对应顶点的渲染位置(图中红色的点),再将点和点之间用线连接起来,也就是箱子的8条边(图中黄色的线)

是不是马上就有点立体感了!那代码上要怎么实现呢,很简单!
C核心代码
首先,定义需要渲染的点,以及这些点的关系索引
// 定义渲染数据
float _points[8][3] = // 点的数据
{
{469.70839522142523, 181.86451044628149, 268.14698315693755}, // x, y, z
{741.60073227608791, 149.05001503297740, 390.61234945175556},
{741.60073227608791, 535.42034601093997, 494.13996576730500},
{469.70839522142523, 568.23484142424411, 371.67459947248699},
{258.39926772391209, 64.579653989059977, 705.86003423269506},
{530.29160477857477, 31.765158575755891, 828.32540052751301},
{530.29160477857477, 418.13548955371851, 931.85301684306251},
{258.39926772391209, 450.94998496702260, 809.38765054824444},
};
int _planes[6][4] = // 面的数据
{
{0, 1, 2, 3}, // 每个面4个角的顶点对应于索引值
{4, 5, 6, 7},
{1, 5, 6, 2},
{3, 2, 6, 7},
{0, 4, 7, 3},
{0, 1, 5, 4}
};第二步,根据上述的实现原理,将其画在结果图上,为方便,我们直接在ShowCGRst函数中对结果图进行修改,这里我们使用了OpenCV的画点函数cv::circle和画线函数cv::line
// 将_points画到结果上
int x, y, z;
for (int i = 0; i < 8; ++i)
{
x = _points[i][0];
y = _points[i][1];
z = _points[i][2];
cv::circle(cvRst, cv::Point(x, y), 5, cv::Scalar(0, 0, 255), -1); // 使用OpenCV的画点函数
}
// 将点之间的关系(即箱子的边缘线)画出来
int x1, y1, z1;
for (int i = 0; i < 6; ++i)
{
for (int j = 0; j < 3; ++j)
{
x = _points[_planes[i][j]][0];
y = _points[_planes[i][j]][1];
z = _points[_planes[i][j]][2];
x1 = _points[_planes[i][j + 1]][0];
y1 = _points[_planes[i][j + 1]][1];
z1 = _points[_planes[i][j + 1]][2];
cv::line(cvRst, cv::Point(x, y), cv::Point(x1, y1), cv::Scalar(0, 255, 255), 2);
}
x = _points[_planes[i][0]][0];
y = _points[_planes[i][0]][1];
z = _points[_planes[i][0]][2];
cv::line(cvRst, cv::Point(x, y), cv::Point(x1, y1), cv::Scalar(0, 255, 255), 2);
}下载完整代码
这里已经画出了箱子的“骨”,下一步我们将绘制箱子的“皮”
第二章:三角面片及其填充
概念解说
上一节中,我们画出了箱子的顶点和边缘线,箱子还只是一个骨架而已。这一节我们来将箱子的“皮”画出来,让箱子的形体更完整。
首先,我们需要将箱子的面由四边形进一步切割成三角形,并进行填充。为什么要将其切割成三角形?原因大概有这么几个
(1)三角形才是最简单的多边形,任何多边形都可以用三角形拼凑出来,或者说任何多边形都可以切割成多个三角形;
(2)三角形能保证其面上所有的点都在同一个平面,其他形状就没有这个特性,例如将一张A4纸沿着对角线对折,它还是只有4条边,但是它就变成了两个三角面,而且这两个三角面不在同一个平面上;
(3)绝大多数标准的3D数据都是由3角形构成,而且很多加载数据的软件一般都会提供将数据3角形化的接口!
数学计算
下一步如何填充三角形呢?最关键的点就是如何判别一个点是否在一个3角形中。
如下图,三角形ABC,任意点D,如果D在三角形内,则按顺序(如A->B->C)有:向量AB旋转到向量AD为逆时针,向量BC旋转到向量BD为逆时针,向量CA旋转到向量CD为逆时针,也就是说三个旋转的方向是一致的!而这个特性在数学上刚好有对应的表示方式----向量的叉乘
向量的叉乘,简单来说就是两个向量![]() 、
、![]() 叉乘结果会生成另外一个向量
叉乘结果会生成另外一个向量![]() ,那么
,那么![]() 垂直于
垂直于![]() 和
和![]() 组成的平面,而且
组成的平面,而且![]() 的方向和
的方向和![]() 旋转到
旋转到![]() 的方向刚好对应!而且因为我们所有的操作都是在XY平面上,所以这里的
的方向刚好对应!而且因为我们所有的操作都是在XY平面上,所以这里的![]() 得x和y分量都为0,其z分量就刚好表示这个方向。
得x和y分量都为0,其z分量就刚好表示这个方向。