从C语言到C++⑨(第三章_C&C++内存管理)详解new和delete+面试题笔试题
目录
1. C语言动态内存管理
1.1 C和C++内存分布
1.2 C语言中动态内存管理的方式
2. C++动态内存管理方式
2.1 new/delete操作内置类型
2.2 初始化new数组的问题
2.3 new 和 delete 操作自定义类型
3. operator new与operator delete函数详解
3.1 operator new与operator delete函数
3.2 重载operator new 与 operator delete(了解)
4. new 和 delete 的实现原理
4.1 对于内置类型
4.2 对于自定义类型
5. 定位new(了解)
5.1 定位new表达式(placement-new)
5.2 定位new的使用场景
6. 常见面试题
6.1 malloc/free和new/delete的区别
7. 笔试选择题
答案及解析
本篇完。
1. C语言动态内存管理
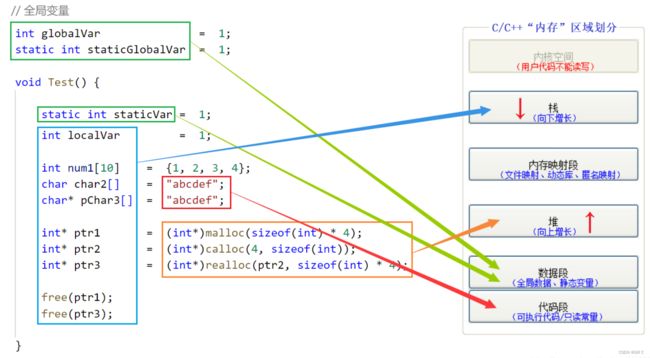
1.1 C和C++内存分布
C和C++内存分布都是一样的。
栈区(stack)
栈又叫堆栈,非静态局部变量/函数参数/返回值等等,栈是向下增长的。
执行函数时,函数内部局部变量的存储单元都可以在栈上创建。
函数执行结束后这些存储单元会被自动释放。栈内存分配运算内置于处理器的指令集中,
拥有很高的效率,但是分配的内存容量是有限的。
栈区主要存放运行函数而分配的局部变量、函数参数、返回数据、返回地址等。
堆区(heap)
堆用于程序运行时动态内存分配,堆是可以上增长的。
一般由程序员自主分配释放,若程序员不主动不释放,程序结束时可能由操作系统回收。
其分配方式类似于链表。
数据段(data segment)
静态存储区,数据段存放全局变量和静态数据,程序结束后由系统释放。
代码段(code segment)
可执行的代码 / 只读常量。代码段存放类成员函数和全局函数的二进制代码。
一个程序起来之后,会把它的空间进行划分,而划分是为了更好地管理。
函数调用,函数里可能会有很多变量,函数调用建立栈帧,栈帧里存形参、局部变量等等。
内存映射段(memory mapping)(了解)
内存映射段是高效的I/O映射方式,用于装载一个共享的动态内存库。
用户可使用系统接口创建共享共享内存,做进程间通信。
结合以前的知识观察下面一段代码,并回答问题:
int globalVar = 1;
static int staticGlobalVar = 1;
void Test()
{
static int staticVar = 1;
int localVar = 1;
int num1[10] = { 1, 2, 3, 4 };
char char2[] = "abcd";
const char* pChar3 = "abcd";
int* ptr1 = (int*)malloc(sizeof(int) * 4);
int* ptr2 = (int*)calloc(4, sizeof(int));
int* ptr3 = (int*)realloc(ptr2, sizeof(int) * 4);
free(ptr1);
free(ptr3);
}2. 填空题:
sizeof(num1) = ____;
sizeof(char2) = ____; strlen(char2) = ____;
sizeof(pChar3) = ____; strlen(pChar3) = ____;
sizeof(ptr1) = ____;
答案解析:
1.2 C语言中动态内存管理的方式
面试题1:malloc / calloc / realloc 的区别?
这三个函数我们以前学C语言已经学过了:
C语言进阶⑰(动态内存管理)四个动态内存函数+动态通讯录+柔性数组_GR C的博客-CSDN博客
相同点:
- 1.都是从堆上申请空间
- 2.都需要对返回值判空
- 3.都需要用户free释放
- 4.返回值类型相同,都是void*
- 5.都需要类型转化
- 6.底层实现上是一样的,都需要开辟多余的空间,用来维护申请的空间
不同点:
- 1.函数名字不同和参数类型不同。
- 2.calloc会对申请空间初始化,并且初始化为0,而其他两个不会。
- 3.malloc申请的空间必须使用memset初始化
- 4.realloc是对已经存在的空间进行调整,当第一个参数传入NULL的时候和malloc一样,调整分为两种情况:
① 调整的空间比原有空间大:
1.大了一点:要调整的多出来的空间小于原有空间后面空闲的空间,
做法:
1.1 直接延伸申请空间
1.2 返回原空间首地址**2.大了很多:要调整的多出来的空间大于于原有空间后面空闲的空间,
做法:
2.1 重新开辟新空间
2.2 将旧空间的内容拷贝到新空间中
2.3 释放旧空间
2.4 返回新空间的首地址② 调整的空间比原有空间小:
做法:
1.将原空间缩小
2 .返回旧空间首地址
面试题2:malloc的实现原理?(以下现在做简单了解)
从操作系统角度看,进程分配内存有两种方式,分别由两个系统调用完成:
brk和mmap(不考虑共享内存)
- brk 是将数据段(.data)的最高地址指针 _edata 往高地址推
- mmap 是在进程的虚拟地址空间中(堆和栈中间,称为“文件映射区域”的地方)找一块空闲的虚拟内存
这两种方式分配的都是虚拟内存,并没有分配物理内存。在第一次访问已分配的虚拟地址空间的时候,会发生缺页中断,操作系统负责分配物理内存,然后建立虚拟内存和物理内存之间的映射关系、
情况一:malloc 小于 128K 的内存,使用 brk() 函数分配
情况二:malloc 大于 128K 的内存,使用 mmap 分配(munmap 释放)
一个拓展链接:【CTF】GLibc堆利用入门-机制介绍_哔哩哔哩_bilibili
2. C++动态内存管理方式
#include
using namespace std;
int main()
{
int* p1 = (int*)malloc(sizeof(int));
int* p2 = (int*)malloc(sizeof(int) * 5);
return 0;
} C语言内存管理方式在C++中可以继续使用,但有些地方就无能为力,而且使用起来比较麻烦
(比如写链表的时候要多次申请空间),因此C++又提出了自己的内存管理方式:
通过new和delete操作符进行动态内存管理。
2.1 new/delete操作内置类型
new/delete 的用法:
#include
using namespace std;
int main()
{
// 动态申请一个int类型的空间
int* p1 = new int;
// 动态申请一个int类型的空间并初始化为10
int* p2 = new int(10);
// 动态申请10个int类型的空间
int* p3 = new int[10];
//释放申请的空间,并置空
delete p1;
p1 = nullptr;
delete p2;
p2 = nullptr;
delete[] p3;
p3 = nullptr;
return 0;
} 是不是非常的方便,而且 new 不需要强制类型转换。
2.2 初始化new数组的问题
C++98 不支持初始化 new 数组:
int* p = new int[5];但现在已经202X年了,C++11 允许大括号初始化,
我们就可以用 { } 列表初始化:(后面讲C++11还会讲这个语法)
int* p4 = new int[5] {1, 2}; // 1 2 0 0 0
int* p5 = new int[5] {1, 2, 3, 4, 5}; // 1 2 3 4 52.3 new 和 delete 操作自定义类型
malloc / free 和 new / delete 对于内置类型没有本质区别,
那么它存在的意义是什么呢?仅仅是因为用法更简洁吗?
巨佬为了这么点事设计出来?可以但没必要,看看作用:
#include
using namespace std;
class A
{
public:
A(int a = 0)
: _a(a)
{
cout << "A():" << this << endl;
}
~A()
{
cout << "~A():" << this << endl;
}
private:
int _a;
};
int main()
{
// new/delete 和 malloc/free最大区别是 new/delete对于【自定义类型】除了开空间
//还会调用构造函数和析构函数
A* p1 = (A*)malloc(sizeof(A));
A* p2 = new A(1);
free(p1);
delete p2;
// 内置类型是几乎是一样的
int* p3 = (int*)malloc(sizeof(int)); // C
int* p4 = new int;
free(p3);
delete p4;
A* p5 = (A*)malloc(sizeof(A) * 10);
A* p6 = new A[10];
free(p5);
delete[] p6;
return 0;
} 
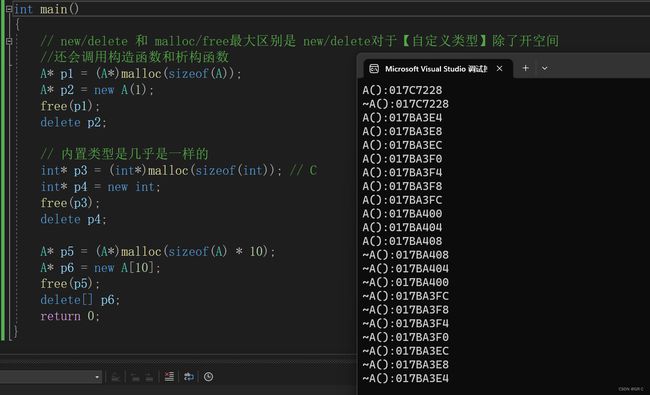
new 不仅会开内存,还会调用对应的构造函数初始化,
相对的,free 只是把 p1 p2 指向的空间释放掉。
而 delete 不仅会释 p1 p2 指向的空间,delete 还会调用对应的析构函数。
new / delete 不仅仅是写法上变得简单了, 可以说就是为了自定义类型弄出来的。
(还有以后学的抛异常,下面讲operator new函数也简单的讲了一下)
new 对应的是 delete,可以可以 new 出来的用 free 释放?
不建议大家混着用, new 出来的用 free,有的编译器就会报错,
new[ ] 出来的 你去 delate 而不是 delete[ ] 也可能会报错。
总结:
在申请自定义类型的空间时,new 会调用构造函数,
delete 会调用析构函数,而 malloc 与 free 不会。
new:在堆上申请空间 + 调用构造函数输出。
delete:先调用指针类型的析构函数 + 释放空间给堆上。
匹配使用:malloc/free ,delete/delete ,new[ ] / delete[ ]
3. operator new与operator delete函数详解
3.1 operator new与operator delete函数
看看源码:(看不懂的部分跳过就行)
/*
operator new:该函数实际通过malloc来申请空间,当malloc申请空间成功时直接返回;申请空间
失败,尝试执行:空间不足应对措施,如果该应对措施用户设置了,则继续申请,否则抛异常。
*/
void* __CRTDECL operator new(size_t size) _THROW1(_STD bad_alloc)
{
// try to allocate size bytes
void* p;
while ((p = malloc(size)) == 0)
if (_callnewh(size) == 0)
{
// report no memory
// 如果申请内存失败了,这里会抛出bad_alloc 类型异常
static const std::bad_alloc nomem;
_RAISE(nomem);
}
return (p);
}
/*
operator delete: 该函数最终是通过free来释放空间的
*/
void operator delete(void* pUserData)
{
_CrtMemBlockHeader* pHead;
RTCCALLBACK(_RTC_Free_hook, (pUserData, 0));
if (pUserData == NULL)
return;
_mlock(_HEAP_LOCK); /* block other threads */
__TRY
/* get a pointer to memory block header */
pHead = pHdr(pUserData);
/* verify block type */
_ASSERTE(_BLOCK_TYPE_IS_VALID(pHead->nBlockUse));
_free_dbg(pUserData, pHead->nBlockUse);
__FINALLY
_munlock(_HEAP_LOCK); /* release other threads */
__END_TRY_FINALLY
return;
}
/*
free的实现
*/
#define free(p) _free_dbg(p, _NORMAL_BLOCK)通过上述两个全局函数的实现可以知道:
① operator new 实际上也是通过 malloc 来申请空间的。
② operator delete 最终也是通过 free 来释放空间的。
如果 malloc 申请空间成功就直接返回,否则执行用户提供的空间不足的应对措施,
如果用户提供该措施就继续申请,否则就抛异常。
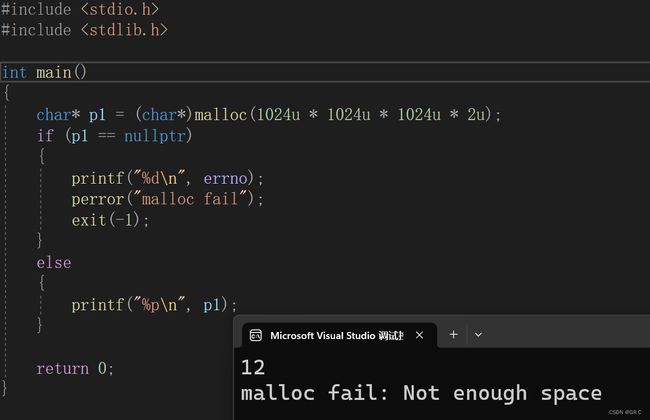
面向过程的语言处理错误的方式:
返回值 + 错误码解决(这个之前博客讲过):
#include
#include
int main()
{
char* p1 = (char*)malloc(1024u * 1024u * 1024u * 2u);
if (p1 == nullptr)
{
printf("%d\n", errno);
perror("malloc fail");
exit(-1);
}
else
{
printf("%p\n", p1);
}
return 0;
} 
而面向对象语言处理错误的方式:
一般是抛异常,C++中也要求出错抛异常 —— try catch(后面会细讲)。
#include
using namespace std;
int main()
{
char* p2 = nullptr;
try
{
char* p2 = new char[1024u * 1024u * 1024u * 2u - 1];
}
catch (const exception& e)
{
cout << e.what() << endl;
}
printf("%p\n", p2);
return 0;
} 
C++ 提出 new 和 delete,主要是解决两个问题:
① 自定义类型对象自动申请的时候,初始化合清理的问题。
new / delete 会调用构造函数和析构函数。
② new 失败了以后要求抛异常,这样才符合面向语言的出错处理机制。
(delete 和 free 一般不会失败,如果失败了,就是释放空间上存在越界或者释放指针位置不对)
3.2 重载operator new 与 operator delete(了解)
默认情况下operator new 与 operator delete使用全局库里面
如果我们自己重载operator new 与 operator delete了,
那么编译器就会调我们自己重载的,而不会调原来的:
#include
using namespace std;
class A
{
public:
A(int a = 0)
: _a(a)
{
cout << "A():" << this << endl;
}
~A()
{
cout << "~A():" << this << endl;
}
private:
int _a;
};
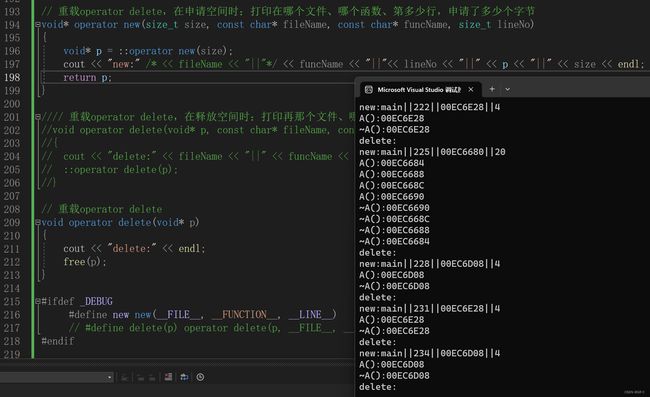
// 重载operator delete,在申请空间时:打印在哪个文件、哪个函数、第多少行,申请了多少个字节
void* operator new(size_t size, const char* fileName, const char* funcName, size_t lineNo)
{
void* p = ::operator new(size);
cout << "new:" << fileName << "||" << funcName << "||" << lineNo << "||" << p << "||" << size << endl;
return p;
}
重载operator delete,在释放空间时:打印再那个文件、哪个函数、第多少行释放,不实现这个,不然使用要加()
//void operator delete(void* p, const char* fileName, const char* funcName, size_t lineNo)
//{
// cout << "delete:" << fileName << "||" << funcName << "||" << lineNo << "||" << p << endl;
// ::operator delete(p);
//}
// 重载operator delete
void operator delete(void* p)
{
cout << "delete:" << endl;
free(p);
}
#ifdef _DEBUG
#define new new(__FILE__, __FUNCTION__, __LINE__)
// #define delete(p) operator delete(p, __FILE__, __FUNCTION__, __LINE__) 不实现这个宏,不然使用要加()
#endif
int main()
{
A* p1 = new A;
delete p1;
A* p2 = new A[4];
delete[] p2;
A* p3 = new A;
delete p3;
A* p4 = new A;
delete p4;
A* p5 = new A;
delete p5;
return 0;
} 这里为了好看就不把文件名打印出来了:
类内重载operator new 与 operator delete:
我们知道:new -> operator new + 构造函数,默认情况下operator new使用全局库里面
每个类可以去实现自己专属operator new new这个类对象,它就会先调自己实现这个operator new
上面我们提到:C语言内存管理方式在有些地方无能为力,而且使用起来比较麻烦
下面代码演示了,针对链表的节点 ListNode 通过重载类专属 operator new / operator delete,
实现链表节点使用内存池申请和释放内存,提高效率:
// new -> operator new + 构造函数
// 默认情况下operator new使用全局库里面
// 每个类可以去实现自己专属operator new new这个类对象,他就会调自己实现这个operator new
// 实现一个类专属的operator new -- 了解一下
#include
using namespace std;
class A
{
public:
A(int a = 0)
: _a(a)
{
cout << "A():" << this << endl;
}
~A()
{
cout << "~A():" << this << endl;
}
private:
int _a;
};
struct ListNode
{
int _val;
ListNode* _next;
static allocator alloc;// 内存池
void* operator new(size_t n)
{
cout << "operator new -> STL内存池allocator申请" << endl;
void* obj = alloc.allocate(1);
return obj;
}
void operator delete(void* ptr)
{
cout << "operator delete -> STL内存池allocator申请" << endl;
alloc.deallocate((ListNode*)ptr, 1);
}
struct ListNode(int val)
:_val(val)
, _next(nullptr)
{}
};
// allocator以后会讲,现在先了解即可
allocator ListNode::alloc;
int main()
{
// 频繁申请ListNode. 想提高效率 -- 申请ListNode时,不去malloc,而是自己定制内存池
ListNode* node1 = new ListNode(1);
ListNode* node2 = new ListNode(2);
ListNode* node3 = new ListNode(3);
delete node1;
delete node2;
delete node3;
A* p1 = new A;
return 0;
} 
4. new 和 delete 的实现原理
4.1 对于内置类型
如果申请的是内置类型的空间,new 和 malloc,delete 和 free 基本相似。
不同的地方是,new / delete 申请和释放的是单个元素的空间,
new[ ] 和 delete[ ] 申请的是连续空间。
而且 new 再申请空间失败时会抛异常,malloc会返回NULL。
operator new 和 operator delete 就是对 malloc 和 free 的封装。
operator new 中调用 malloc 后申请内存,失败以后,改为抛异常处理错误,
这样符合C++面向对象语言处理错误的方式。
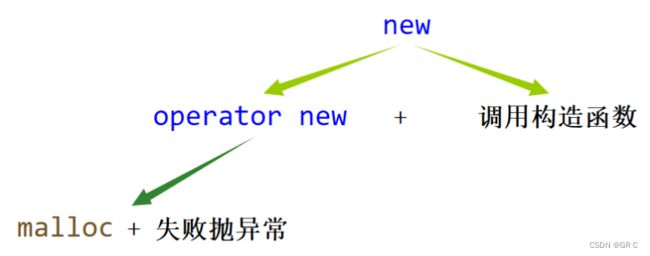
4.2 对于自定义类型
new 的原理:
① 调用 operator new 函数申请空间。
② 在申请空间上执行构造函数,完成对象的构造。
delete 的原理:
① 在空间上执行析构函数,完成对象中资源的清理工作。
② 调用 operator delete 函数释放对象的空间。
new T[N] 的原理:
① 调用 operator new[] 函数,在 operator new[] 中实际调用
operator new 函数完成 N 个对象空间的申请。
② 在申请的空间上调用 N 次构造函数,对它们分别初始化。
delete[] 的原理:
① 在释放的对象空间上执行 N 次析构函数,完成 N 个对象中资源的清理。
② 调用 operator delete[] 释放空间,实际在 operator delete[] 中调用
operator delete 来释放空间。
5. 定位new(了解)
5.1 定位new表达式(placement-new)
定位 new 表达式是在已分配的原始空间中调用构造函数初始化一个对象。
简单来说就是,定位new表达式可以在已有的空间进行初始化。
写法:
new(目标地址指针)类型 // 不带参
new(目标地址指针)类型(该类型的初始化列表) // 带参注意:目标地址必须是一个指针。
5.2 定位new的使用场景
定位 new 在特定情况下是有用的。
比如开的空间是从内存池来的,如果想初始化,我们就可以使用它。
因为内存池分配出的内存初始化,所以如果是自定义类型的对象,
需要使用 new 定义的表达式进行显示调用构造函数进行初始化。
#include
using namespace std;
class A
{
public:
A(int a = 0)
: _a(a)
{
cout << "A():" << this << endl;
}
~A()
{
cout << "~A():" << this << endl;
}
private:
int _a;
};
int main()
{
A* p1 = new A;
A* p2 = (A*)malloc(sizeof(A));
if (p2 == nullptr)
{
perror("malloc fail");
}
//new(p2)A;
new(p2)A(10);
return 0;
} 模拟一下 new 的行为:
int main()
{
A* p1 = (A*)malloc(sizeof(A));
new(p1)A(10);
// 模拟一下new的行为
A* p2 = new A(2);
// 等价于:
A* p3 = (A*)operator new(sizeof(A));
new(p3)A(3);
return 0;
}平常不会这么写,但是有时内存不一定是从堆来的,比如从内存池来的,定位 new 就有用了。
6. 常见面试题
6.1 malloc/free和new/delete的区别
malloc/free和new/delete的共同点是:都从堆上申请空间,都需要用户手动释放。不同的地方是:
- 1. malloc和free是函数,new和delete是操作符
- 2. malloc申请的空间不会初始化,new可以初始化
- 3. malloc申请空间时,需要手动计算空间大小并传递,new只需在其后跟上空间的类型即可,如果是多个对象,[ ]中指定对象个数即可
- 4. malloc的返回值为void*, 在使用时必须强转,new不需要,因为new后跟的是空间的类型。
- 5. malloc申请空间失败时,返回的是NULL,因此使用时必须判空,new不需要,但是new需要捕获异常
- 6. 申请自定义类型对象时,malloc/free只会开辟空间,不会调用构造函数与析构函数,而new在申请空间后会调用构造函数完成对象的初始化,delete在释放空间前会调用析构函数完成空间中资源的清理。
7. 笔试选择题
7.1 下面有关c++内存分配堆栈说法错误的是( )
A.对于栈来讲,是由编译器自动管理,无需我们手工控制;对于堆来说,释放工作由程序员控制
B. 对于栈来讲,生长方向是向下的,也就是向着内存地址减小的方向;对于堆来讲,它的生长方向是向上的,是向着内存地址增加的方向增长
C.对于堆来讲,频繁的 new/delete 势必会造成内存空间的不连续,从而造成大量的碎片,使程序效率降低。对于栈来讲,则不会存在这个问题
D.一般来讲在 32 位系统下,堆内存可以达到4G的空间,但是对于栈来讲,一般都是有一定的空间大小的
7.2 C++中关于堆和栈的说法,哪个是错误的( )
A.堆的大小仅受操作系统的限制,栈的大小一般较小
B.在堆上频繁的调用new/delete容易产生内存碎片,栈没有这个问题
C.堆和栈都可以静态分配
D.堆和栈都可以动态分配
7.3 c++中,类ClassA的构造函数和析构函数的执行次数分别为( )
ClassA *pclassa=new ClassA[5];
delete pclassa;A.5,1
B.1,1
C.5,5
D.程序可能崩溃
7.4 函数参数使用的空间是在()中申请的,malloc或new是在()中申请空间的?()
A.堆,栈
B.栈,堆
C.栈, 栈
D.堆,堆
7.5 下面有关malloc和new,说法错误的是? ( )
A.new 是创建一个对象(先分配空间,再调构造函数初始化), malloc分配的是一块内存
B.new 初始化对象,调用对象的构造函数,对应的delete调用相应的析构函数,malloc仅仅分配内存,free仅仅回收内存
C.new和malloc都是保留字,不需要头文件支持
D.new和malloc都可用于申请动态内存,new是一个操作符,malloc是是一个函数
7.6 设已经有A,B,C,D4个类的定义,程序中A,B,C,D析构函数调用顺序为? ( )
C c;
void main()
{
A*pa=new A();
B b;
static D d;
delete pa;
}A.A B C D
B.A B D C
C.A C D B
D.A C B D
7.7 使用 char* p = new char[100]申请一段内存,然后使用delete p释放,有什么问题?( )
A.会有内存泄露
B.不会有内存泄露,但不建议用
C.编译就会报错,必须使用delete []p
D.编译没问题,运行会直接崩溃
7.8 以下代码中,A 的构造函数和析构函数分别执行了几次: ( )
A.1、1
B.10、10
C.1、10
D.10、1
7.9 变量所在哪个内存区域以及变量所占空间大小是多少?
int globalVar = 1;
static int staticGlobalVar = 1;
void Test()
{
static int staticVar = 1;
int localVar = 1;
int num1[10] = { 1, 2, 3, 4 };
char char2[] = "abcd";
const char* pChar3 = "abcd";
int* ptr1 = (int*)malloc(sizeof(int) * 4);
int* ptr2 = (int*)calloc(4, sizeof(int));
int* ptr3 = (int*)realloc(ptr2, sizeof(int) * 4);
free(ptr1);
free(ptr3);
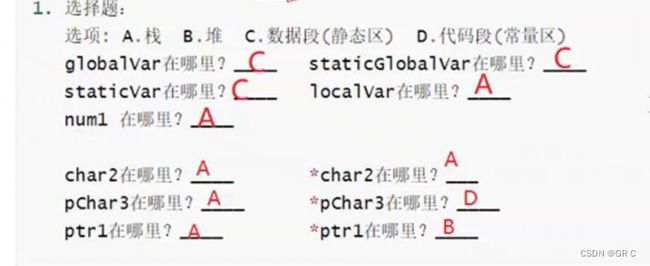
}1. 选择题:
选项: A.栈 B.堆 C.数据段(静态区) D.代码段(常量区)
globalVar在哪里?____ staticGlobalVar在哪里?____
staticVar在哪里?____ localVar在哪里?____
num1 在哪里?____
char2在哪里?____ *char2在哪里?___
pChar3在哪里?____ *pChar3在哪里?____
ptr1在哪里?____ *ptr1在哪里?____
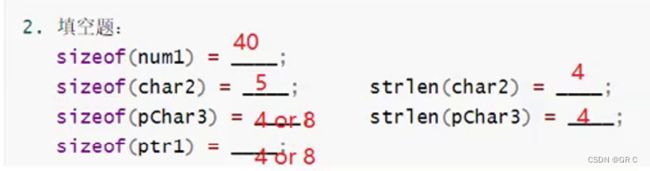
2. 填空题:
sizeof(num1) = ____;
sizeof(char2) = ____; strlen(char2) = ____;
sizeof(pChar3) = ____; strlen(pChar3) = ____;
sizeof(ptr1) = ____;
答案及解析
7.1 D
A.栈区主要存在局部变量和函数参数,其空间的管理由编译器自动完成,无需手动控制,堆区是自己申请的空间,在不需 要时需要手动释放
B.栈区先定义的变量放到栈底,地址高,后定义的变量放到栈顶,地址低,因此是向下生长的,堆区则相反
C.频繁的申请空间和释放空间,容易造成内存碎片,甚至内存泄漏,栈区由于是自动管理,不存在此问题
D.32位系统下,最大的访问内存空间为4G,所以不可能把所有的内存空间当做堆内存使用,故错误
7.2 C
A.堆大小受限于操作系统,而栈空间一般有系统直接分配
B.频繁的申请空间和释放空间,容易造成内存碎片,甚至内存泄漏,栈区由于是自动管理,不存在此问题
C.堆无法静态分配,只能动态分配
D.栈可以通过函数_alloca进行动态分配,不过注意,所分配空间不能通过free或delete进行释放
7.3 D
申请对象数组,会调用构造函数5次,delete由于没有使用[],此时只会调用一次析构函数,但往往会引发程序崩溃,要想完整释放数组空间,需要使用[]
7.4 B
7.5 C
A.new会申请空间,同时调用构造函数初始化对象,malloc只做一件事就是申请空间
B.new/delete与malloc/free最大区别就在于是否会调用构造函数与析构函数
C.需要头文件malloc.h,只是平时这个头文件已经被其他头文件所包含了,用的时候很少单独引入,故错误
D.new是操作符,malloc是函数
7.6 B
首先手动释放pa, 所以会先调用A的析构函数,其次C B D的构造顺序为 C D B,因为先构造全局对象,再构造局部静态对象,最后才构造普通对象,然而析构对象的顺序是完全按照构造的相反顺序进行的,所以答案为 B
7.7 B
A.对于内置类型,此时delete就相当于free,因此不会造成内存泄漏
B.正确
C.编译不会报错,建议针对数组释放使用delete[],如果是自定义类型,不使用方括号就会运行时错误
D.对于内置类型,程序不会崩溃,但不建议这样使用
7.8 B
A.申请数组空间,构造函数调用的次数就是数组的大小
B.正确
C.申请数组空间,构造函数调用的次数就是数组的大小
D.如果释放数组空间,delete使用了[],则会对应的调用数组大小次数的析构函数
7.9 本篇最上面已经说过了:
本篇完。
下一篇:(模板初阶+STL简介)。
穿越回来复习顺便贴个下篇链接:
从C语言到C++⑩(第四章_模板初阶+STL简介)如何学习STL_c语言生成 stl文件-CSDN博客