open3d k-means 聚类
k-means 聚类
-
-
- 一、算法原理
-
-
- 1、介绍
- 2、算法步骤
-
- 二、代码
-
-
- 1、机器学习生成`kmeans`聚类
- 2、点云学习生成聚类
-
- 三、结果
-
-
- 1、原点云
- 2、机器学习生成`kmeans`聚类
- 3、点云学习生成聚类
-
- 四、相关链接
-
一、算法原理
1、介绍
K-means聚类算法是一种无监督学习算法,主要用于数据聚类。该算法的主要目标是找到一个数据点的划分,使得每个数据点与其所在簇的质心(即该簇所有数据点的均值)之间的平方距离之和最小。
在K-means聚类算法中,首先需要预定义簇的数量K,然后随机选择K个对象作为初始的聚类中心。接着,算法会遍历数据集中的每个对象,根据对象与各个聚类中心的距离,将每个对象分配给距离它最近的聚类中心。完成一轮分配后,算法会重新计算每个簇的聚类中心,新的聚类中心是该簇所有对象的均值。这个过程会不断重复,直到满足某个终止条件,如没有(或最小数目)对象被重新分配给不同的簇,没有(或最小数目)簇的中心再发生变化,或者误差平方和局部最小。
2、算法步骤

二、代码
1、机器学习生成kmeans聚类
# -*- coding: utf-8 -*-
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn import cluster
def KMeans():
# KMeans聚类,非监督
pcd_path = r"res/bunny.pcd"
pcd = o3d.io.read_point_cloud(pcd_path)
pcd = o3d.geometry.PointCloud(pcd)
o3d.visualization.draw_geometries([pcd])
print(pcd)
# 对点云数据进行着色操作,使其所有点的颜色相同,颜色为 [0, 0, 0]
pcd.paint_uniform_color(color=[0, 0, 0])
n_clusters = 3 # 聚类簇数
# 将点云数据转换为 numpy 数组,并使用 sklearn 的 KMeans 进行聚类
points = np.asarray(pcd.points)
print(points)
kmeans = cluster.KMeans(n_clusters=n_clusters, random_state=42, n_init=10, init="k-means++")
kmeans.fit(points) # 获取聚类结果,这里主要是每个点的类别标签
labels = kmeans.labels_
# 随机生成一些颜色,然后根据类别标签将这些颜色分配给对应的点
colors = np.random.randint(0, 255, size=(n_clusters, 3)) / 255
colors = colors[labels]
# 对原始的点云数据做一个深度拷贝,并将这个拷贝的每个点的位置向下移动50个单位。这是为了在可视化时更清楚地看到聚类效果
pcd_cluster = deepcopy(pcd)
pcd_cluster.translate([50, 0, 0])
# 将新生成的颜色赋值给拷贝的点云数据
pcd_cluster.colors = o3d.utility.Vector3dVector(colors)
o3d.visualization.draw_geometries([pcd_cluster])
if __name__ == "__main__":
KMeans()
2、点云学习生成聚类
import numpy as np
import open3d as o3d
import copy
from matplotlib import pyplot as plt
# 在点云上添加分类标签
def draw_labels_on_model(pcl, labels):
cmap = plt.get_cmap("tab20")
pcl_temp = copy.deepcopy(pcl)
max_label = labels.max()
colors = cmap(labels / (max_label if max_label > 0 else 1))
pcl_temp.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcl_temp])
# 计算欧氏距离
def euclidean_distance(one_sample, X):
# 将one_sample转换为一纬向量
one_sample = one_sample.reshape(1, -1)
# 把X转换成一维向量
X = X.reshape(X.shape[0], -1)
# 这是用来确保one_sample的尺寸与X相同
distances = np.power(np.tile(one_sample, (X.shape[0], 1)) - X, 2).sum(axis=1)
return distances
class Kmeans(object):
# 构造函数
def __init__(self, k=2, max_iterations=1500, tolerance=0.00001):
self.k = k
self.max_iterations = max_iterations
self.tolerance = tolerance
# 随机选取k个聚类中心点
def init_random_centroids(self, X):
# save the shape of X
n_samples, n_features = np.shape(X)
# make a zero matrix to store values
centroids = np.zeros((self.k, n_features))
# 因为有k个中心点,所以执行k次循环
for i in range(self.k):
# 随机选取范围内的值
centroid = X[np.random.choice(range(n_samples))]
centroids[i] = centroid
return centroids
# 查找距离样本点最近的中心
def closest_centroid(self, sample, centroids):
distances = euclidean_distance(sample, centroids)
# np.argmin 返回距离最小值的下标
closest_i = np.argmin(distances)
return closest_i
# 确定聚类
def create_clusters(self, centroids, X):
# 这是为了构造用于存储集群的嵌套列表
clusters = [[] for _ in range(self.k)]
for sample_i, sample in enumerate(X):
centroid_i = self.closest_centroid(sample, centroids)
clusters[centroid_i].append(sample_i)
return clusters
# 基于均值算法更新质心
def update_centroids(self, clusters, X):
n_features = np.shape(X)[1]
centroids = np.zeros((self.k, n_features))
for i, cluster in enumerate(clusters):
centroid = np.mean(X[cluster], axis=0)
centroids[i] = centroid
return centroids
# 获取标签
def get_cluster_labels(self, clusters, X):
y_pred = np.zeros(np.shape(X)[0])
for cluster_i, cluster in enumerate(clusters):
for sample_i in cluster:
y_pred[sample_i] = cluster_i
return y_pred
# 预测标签
def predict(self, X):
# 随机选取中心点
centroids = self.init_random_centroids(X)
for _ in range(self.max_iterations):
# 对所有点进行聚类
clusters = self.create_clusters(centroids, X)
former_centroids = centroids
# 计算新的聚类中心
centroids = self.update_centroids(clusters, X)
# 判断是否满足收敛
diff = centroids - former_centroids
if diff.any() < self.tolerance:
break
return self.get_cluster_labels(clusters, X)
if __name__ == "__main__":
# 加载点云
pcd = o3d.io.read_point_cloud('res/bunny.pcd')
points = np.asarray(pcd.points)
o3d.visualization.draw_geometries([pcd])
# 执行K-means聚类
clf = Kmeans(k=3)
labels = clf.predict(points)
# 可视化聚类结果
draw_labels_on_model(pcd, labels)
三、结果
1、原点云
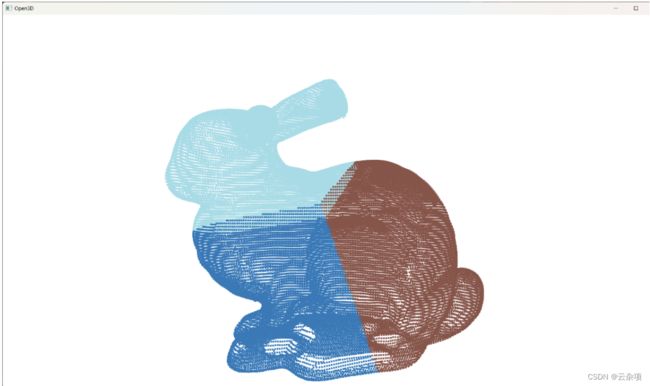
2、机器学习生成kmeans聚类

3、点云学习生成聚类
四、相关链接
机器学习参考:【Lidar】Open3D点云K-Means聚类算法:基于距离的点云聚类(单木分割)附Python代码_单木分割python代码-CSDN博客
点云学习:Open3D Kmeans点云聚类(python详细过程版)_点云k-means聚类pcl-python-CSDN博客
DBSCAN 聚类:open3d DBSCAN 聚类-CSDN博客
k-means算法介绍:【机器学习】K-means(非常详细) - 知乎 (zhihu.com)
百度网盘数据集:
包括 obj,pcd,las,png,ply等
百度网盘链接:https://pan.baidu.com/s/1JFxKUk_xMcEmpfBHtuC-Pg
提取码:cpev