基于S5PC100裸机程序之SPI(上)
作者:杨老师,华清远见嵌入式学院讲师。
SPI作为应用最为广泛的通信总线协议之一,开发人员应当掌握,本章将介绍SPI总线协议的基本理论,以及S5PC100的SPI总线控制器的操作方法。
1. SPI总线协议理论
1.1 协议简介
SPI是英文Serial Peripheral Interface的缩写,该协议是由美国摩托罗拉公司推出的一种同步串行传输规范,首先由摩托罗拉公司在其MC68HCXX系列处理器上定义,后主要应 用在 EEPROM、FLASH、实时时钟、AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI是一种高速的全双工、同步的通信总线,并且在芯片的引脚上只占用四根线,节约了芯片的引脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
1.2 协议内容
SPI有4个引脚:CS(从器件选择线)、SDO(串行数据输出线)、SDI(串行数据输入线)和SPICLK(同步串行时钟线)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,这些脚的定义如下:
(1)SDO(MOSI)——主设备数据输出,从设备数据输入。
(2)SDI(MISO)——主设备数据输入,从设备数据输出。
(3)SPICLK——时钟信号,由主设备产生。
(4)CS——从设备使能信号,由主设备控制。
其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。这就使在同一总线上连接多个SPI设备成为可能。其中总线协议时序如图1所示。
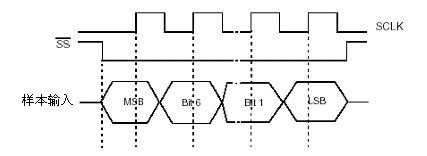
图1 SPI总线协议时序
接下来就是负责通信的3根线了。通信是通过数据交换完成的,这里先要知道SPI是串行通信协议,也就是说数 据是一位一位地传输的。这就是SPICLK时钟线存在的原因,由SPICLK提供时钟脉冲,SDO、SDI则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取,完成一位数据传输,输入也使用同样原理。这样,在至少8次时钟信号的改变 (上沿和下沿为一次)后,就可以完成8位数据的传输。
要注意的是,SPICLK信号线只由主设备控制,从设备不能控制信号线。同样在一个基于SPI的设备中,至 少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,即其与普通的串行通信不同,普通的串行通信一次连续传送至少8位数据,而SPI允许数据一 位一位地传送,甚至允许暂停,因为SPICLK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SPICLK时 钟线的控制可以完成对通信的控制。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI设备 的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立地使能信号,在硬件上要比I2C总线控制稍微复杂一些。
注意:
SPI的一个缺点是没有指定的流控制,没有应答机制确认是否接收到数据。
SPI 控制器为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大影响。如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传 输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样,如图2所示;如果CPHA=1,在串行同步时钟的第 二个跳变沿(上升或下降)数据被采样,如图3所示。SPI主控制器和与之通信的外设时钟相位和极性应该一致,另外,上面提到这些特性将在寄存器中具体实 现。
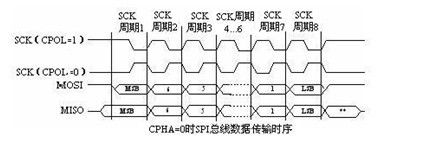
图2 CPHA=0时的情况
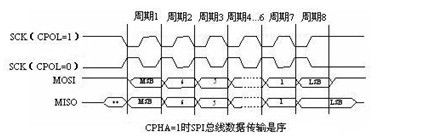
图3 CPHA=1时的情况
2 SPI控制器详解
2.1 S5PC100的SPI控制器简介
S5PC100包含了两套8位、16位、32位移位寄存器用于收发。在SPI传输数据时,数据的发送及接收数据是同步的,该总线控制器支持摩托罗拉串行外设接口。
下面是该控制器的特性:
全双工通信方式。
8位、16位、32位移位寄存器。
3时钟源供应。
支持8位、16位、32位总线接口。
支持摩托罗拉SPI协议。
支持两个独立的传输及接收FIFO。
支持主机模式及从机模式。
无法传送条件下接收。
Tx/Rx频率最大支持50MHz。
2.2 时钟源控制
每个SPI都能获得不同的3个时钟源,用户可以根据自己的需要来进行配置,需要设置CLK_CFG这个寄存器,后面将会介绍。
时钟控制器如图4所示。
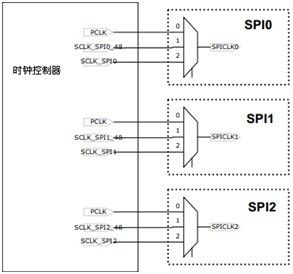
图4 时钟控制器
2.3 寄存器详解
如表-1所示为SPI配置寄存器。
表1 SPI配置寄存器
| MODE_CFGn | 位 | 描述 | 复位值 |
| CH_WIDTH | [30:29] | 00 = 字节 01 = 半字 10 = 字 11 = 保留 |
0 |
| TRAILING_CNT | [28:19] | 接收FIFO中最后写入字节的个数 | 0 |
| BUS_WIDTH | [18:17] | 00 = 字节 01 = 半字 10 = 字 11 = 保留 |
0 |
如表2所示为时钟配置寄存器。
表2 时钟配置寄存器
| MODE_CFGn | 位 | 描述 | 复位值 |
| CH_WIDTH | [30:29] | 00 = 字节 01 = 半字 10 = 字 11 = 保留 |
0 |
| TRAILING_CNT | [28:19] | 接收FIFO中最后写入字节的个数 | 0 |
| BUS_WIDTH | [18:17] | 00 = 字节 01 = 半字 10 = 字 11 = 保留 |
0 |
如表3所示为SPI模式配置寄存器。
表3 SPI模式配置寄存器
| CLK_CFGn | 位 | 描述 | 复位值 |
| SPI_CLKSEL | [10:9] | 时钟源选择 00 = PCLK 01 = SCLK_SPI_48 10 = SCLK_SPI 11 = 保留 |
0 |
| ENCLK | [8] | 时钟使能 0 = 禁止 1 = 使能 |
0 |
| SPI_SCALER | [7:0] | SPI时钟分频值 SPI 时钟输出 =时钟源 /(2 x(预分值 +1)) |
0 |
如表4所示为SPI数据发送寄存器。
表4 SPI数据发送寄存器
| SPI_TX_DATAn | 位 | 描述 | 复位值 |
| TX_DATA | [31:0] | 该寄存器包含了所要发送的数据 | 0 |
表5所示为SPI数据接收寄存器。
表5 SPI数据接收寄存器
| SPI_RX_DATAn | 位 | 描述 | 复位值 |
| RX_DATA | [31:0] | 该寄存器包含了所要接收的数据 | 0 |
如表6所示为SPI状态寄存器。
表6 SPI状态寄存器
| SPI_STATUSn | 位 | 描述 | 复位值 |
| TX_DONE | [21] | 0 = 其他情况 1 = 发送移位寄存器准备 |
0 |
| RX_FIFO_LVL | [19:13] | RX FIFO 0 ~ 64 字节 | 0 |
| TX_FIFO_LVL | [12:6] | TX FIFO 0 ~ 64 字节 | 0 |
| RX_OVERRUN | [5] | Rx Fifo 溢出错误 0 =无误 1 = 溢出错 |
0 |
| RX_UNDERRUN | [4] | 0 = 无误 1 = 数据缺失 | 0 |
| TX_OVERRUN | [3] | Tx Fifo 溢出错误 0 =无误 1 = 溢出错 |
0 |
| TX_UNDERRUN | [2] | 0 = 无误 1 = 数据缺失 | 0 |
3 SPI接口应用示例
这里将介绍一种通过SPI通信的Flash,该芯片是M24PXX,如图5所示为该芯片的原理图,每根接线的意义已经清楚地标识出来了。

图5 M25PXX原理图
这一款芯片内部集成了12条指令,包括了通用的读、写、配置等命令,还有一个内置的状态寄存器,可以通过该寄存器获取芯片当前状态。
文章来源:华清远见嵌入式学院,原文地址:http://www.embedu.org/Column/Column884.htm