Recurrent Neural Network(循环神经网络)
Reference: Alex Graves的[Supervised Sequence Labelling with RecurrentNeural Networks]
Alex是RNN最著名变种,LSTM发明者Jürgen Schmidhuber的高徒,现加入University of Toronto,拜师Hinton。
统计语言模型与序列学习
1.1 基于频数统计的语言模型
NLP领域最著名的语言模型莫过于N-Gram。
它基于马尔可夫假设,当然,这是一个2-Gram(Bi-Gram)模型:
任意一个词$W_{i}$出现的概率只同它前面的词$W_{i-1}$有关。
迁移到N-Gram中,就变成:
在一个句子当中,一个单词的T出现的概率,和其前N个单词是有关的:
$P(W_{t}|W_{t-N}....,W_{t-1},W_{t+1}....,W_{t+N})$
早期计算Bi-Gram的方法,正如吴军博士所著的《数学之美》里科普的那样,采用词频统计法:
$P(W_{i}|W_{i-1})=\frac{P(W_{i-1},W_{i})}{P(W_{i-1})}\approx \frac{Cnt(W_{i-1},W_{i})}{Cnt(W_{i-1})}$
只需要统计一下$W_{i}$、$W_{i-1}$一起出现的频数就可以了。
看起来确实很简单,很数学之美。当然,作为一本科普读物,它是不会告诉你这种方法是有多大危害的。
具体实现,可以使用以下两个算法:
①KMP:将$W_{i}$、$W_{i-1}$两个词拼在一起,跑一次Text串。
②AC自动机:同样拼接,不过是预先拼好所有的模式串,输入AC自动机里,仅仅跑一次Text串。
但如果你是一名ACM选手,应该对AC自动机深有体会,这玩意简直就是内存杀手。
两者相害,取其轻。很明显,实际运用的时候,根本不会考虑KMP,优先选择空间换时间的AC自动机算法。
在[CS224D Lecture7]中,Socher提到了N-Gram频数统计法的state-of-art结果,[Heafield 2013]
看看Abstract就够吓人了:
Using one machine with 140 GB RAM for 2.8 days, we built an unpruned model on 126 billion tokens.
还是建立在 MapReduce 上。这种吃硬件的方法,不得不说,真是够糟糕的。
1.2 基于神经网络的语言模型
Neural Network Language Model (NNLM),最早正式在[Bengio03]提出。
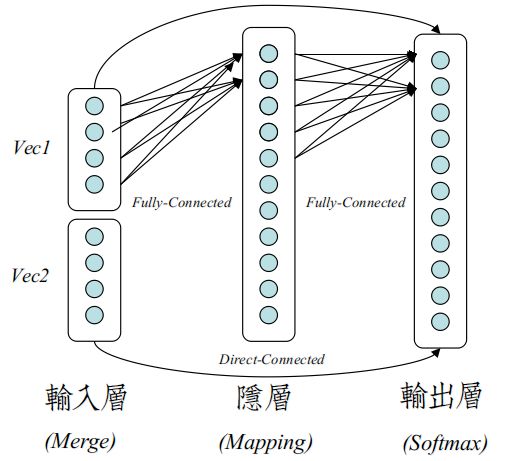
Bengio使用的是一个经典的前馈网络来训练N-Gram不同之处在于,输入层是可训练的。
输入层最后被训练成Word Vector,在[Mikolov13]提出Word2Vec之前,大多称为Word Embeddings。
具体的方法:
①为每个词,构建$|N*Dim|$的向量参数。这点与Word2Vec的简化方法有所不同。
Word2Vec取消训练了词序信息,所以向量大小是$|Dim|$。
②拿到一个句子,句子长度是T,利用词的索引,组合出$|T,N*Dim|$的输入矩阵。
③如普通NN一样,Softmax误差,BP传播,更新。
NNLM方法,轻量的复现的N-Gram模型,需要更少的内存。且无须做平滑处理,如[Katz backoff]。
1.3 序列学习
正如朴素贝叶斯假设一样,马尔可夫假设也是一种糟糕的近似。
对于一个词$W_{i}$,只覆盖前N个词,很多时候是抓不住重点的。
最好的解决方案,当然是对于一个词$W_{i}$,覆盖其前面的所有词。
模仿动态规划原理,构建成一个动态序列模型。这需要Recurrent Neural Network(RNN)来实现。
RNN通常译为循环神经网络,其类似动态规划的原理,也可译为时序递归神经网络。
当然还有结构递归神经网络RNN(Recursive Neural Network),使用频率不高,没落。
通常RNN指的是时序递归RNN。
RNN结构与更新
2.1 经典之作:Elman's Simple Recurrent Networks(SRN)
J. L. Elman提出的SRN是RNN系中结构最简单的一个变种,相较于传统的2层FC前馈网络,它仅仅在FC层添加了时序反馈连接。
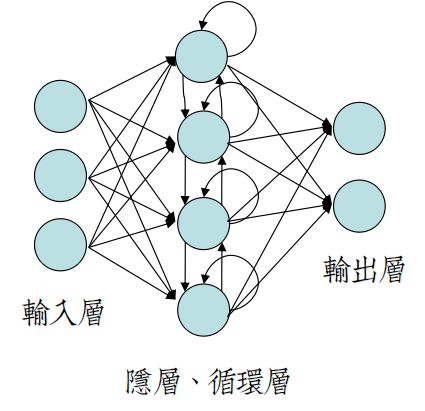
左图是不完整的结构图,因为循环层的环太难画,包含自环、交叉环。
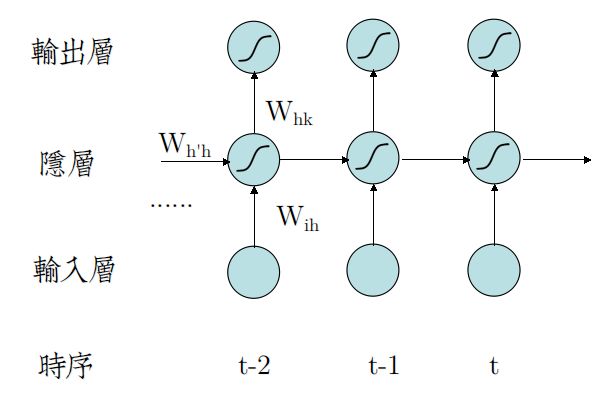
所以RNN一般都画成时序展开图,如右图。
从时序展开图中,容易看出,SRN在时序t时,前面的全部状态,压缩在一起,输入到当前隐层中。
因而,RNN可以看成是具有动态深度结构的图模型,随着时序的增加,网络深度越来越大,因而属于深度神经网络。
2.2 前向传播
较于2层前馈网络,唯一变化是,时序为$t$时,隐层输入由两部分组成:
①输入层映射变换。(非递归)
②时序为$t-1$时,隐层神经元的激活输出。(时序递归)
以下用$a_{j}^{t}$表示神经元j的输入,$b_{j}^{t}$表示神经元j的激活后输出,为表示清晰,忽略Bias。
输入到达隐层时,有:
$a_{h}^{t}=\sum_{i=1}^{I}w_{ih}x_{i}^{t}+\sum_{h^{'}=1}^{H}w_{h^{'}h}b_{h^{'}}^{t-1}$
多出的$h^{'}->h$变换,大可称为隐隐层变换,为前馈网络带来记忆槽。
它记忆着时序$[1,t-1]$到达输出层之前的神经元的全部状态。
激活隐层神经元后,有:
$b_{h}^{t}=Activation(a_{h}^{t})$
经过输出层后,有:
$y_{k}^{t}=Softmax(W_{hk}b_{h}^{t})$
2.3 反向传播
仿照BP网络一样,定义局部梯度:
$\delta _{y}^{t}=\frac{\partial \mathcal{L}}{\partial b_{y}^{t}} \cdot \frac{\partial b_{y}^{t}}{\partial a_{y}^{t}}$
也就是说,从似然函数开始,由链式尾,导到$\partial W$的前一步。
对输出层,有:
$\frac{\partial \mathcal{L}}{\partial W_{hk}}=\delta_{k}^{t}\cdot\frac{\partial a_{j}^{t}}{\partial W_{hk}}$
$\delta_{k}^{t}$即,Softmax里的 $(1\{y_{i}=j\}-P(y^{(i)}=j|x;\theta_{j})),j=1,2....k$
对隐隐层,有:
$\frac{\partial \mathcal{L}}{\partial W_{h^{'}h}}=\sum_{p=1}^{t}\frac{\partial \mathcal{L}}{\partial b_{k}^{t}}\cdot\frac{\partial b_{k}^{t}}{\partial a_{k}^{t}}\cdot\frac{\partial b_{h}^{t}}{\partial b_{h}^{p}}\cdot\frac{\partial b_{h}^{p}}{\partial W_{h^{'}h}} \qquad where \quad \frac{\partial b_{h}^{t}}{\partial b_{h}^{p}}=\prod_{j=p+1}^{t}\frac{\partial b_{h}^{j}}{\partial b_{h}^{j-1}}$
上式来自[CS224d Lecture7],是RNN的Feet of Clay,需要牢记。
因为需要累乘,相当于求一个超深度神经网络结构的梯度,会带来严重的Gradient Vanish\Exploding。下文会详细描述。
至于为什么可以写成那样,你可以用一个简单的单神经元,无激活函数的网络推一下:
$a_{3}=wx_{3}+w^{'}a_{2}=....=wx_{3}+w^{'}wx_{2}+(w^{'})^{2}wx_{1}\\\\\frac{\partial a_{3}}{w^{'}}=????\\\\Answer=\frac{\partial a_{3}}{\partial a_{3}}\cdot\frac{\partial a_{3}}{w^{'}}+\frac{\partial a_{3}}{\partial a_{3}}\cdot\frac{\partial a_{3}}{\partial a_{2}}\cdot\frac{\partial a_{2}}{w^{'}}+\frac{\partial a_{3}}{\partial a_{3}}\cdot\frac{\partial a_{3}}{\partial a_{2}}\cdot\frac{\partial a_{2}}{\partial a_{1}}\cdot\frac{\partial a_{1}}{w^{'}}$
同样,去掉后面的部分,有局部梯度:
$\delta_{h^{'}}^{t}=\sum_{p=1}^{t}\frac{\partial \mathcal{L}}{\partial b_{k}^{t}}\cdot\frac{\partial b_{k}^{t}}{\partial a_{k}^{t}}\cdot\frac{\partial b_{h}^{t}}{\partial b_{h}^{p}} \qquad where \quad \frac{\partial b_{h}^{t}}{\partial b_{h}^{p}}=\prod_{j=p+1}^{t}\frac{\partial b_{h}^{j}}{\partial b_{h}^{j-1}}$
这样,对隐层,就有著名的BPTT更新法则,正如[Alex]书中所写:
$\delta _{h}^{t}=Activation^{'}(a_{h}^{t})\begin{pmatrix}\sum_{k=1}^{K}\delta _{k}^{t}w_{hk}+\sum_{h^{'}=1}^{H}\delta _{h^{'}}^{t+1}w_{hh^{'}}\end{pmatrix}$
当然$\delta _{h^{'}}^{T+1}$会越界,等于0。
这里,最头疼的是,为什么隐隐层的局部梯度是取决于时序t+1的?
这个需要跨越一步来看,$W^{t}$不仅会在当前时序t,作为隐层参数出现,还会在时序t+1,作为隐隐层的附加参数出现。
这样,链式法则波及到了时序t,以及时序t+1,所以局部梯度由两部分组成,这是BPTT更新法的精髓。
最后一部分:
$\frac{\partial \mathcal{L}}{\partial W_{ih}}=\frac{\partial \mathcal{L}}{\partial a_{h}^{t}}\cdot\frac{\partial a_{h}^{t}}{\partial W_{ih}}=\delta _{h}^{t}x_{i}^{t}$