【车载智能座舱域控制器】-【测试】
目录
一、座舱SOC芯片历程介绍
1、注解:
1. CPU(中央处理器)
2. GPU(图形处理器)
3. NPU(神经处理单元)
2、具体应用示例
3、性能指标的重要性
二、智能座舱包含哪些功能
三、智能座舱测试包括:
四、智能座舱HIL测试系统
1、智能数字座舱HIL自动化测试系统框图如下:
编辑
2、智能座舱HIL测试系统架构
2.1测试范围:
2.2系统亮点:
一、座舱SOC芯片历程介绍
座舱域控制器用的主控SoC芯片,大家第一个会想到应该就是高通的SA8155P 。目前,在主机厂新上市的中高端车型中,其座舱的主控SoC芯片多是采用高通的SA8155P, SA8155P为什么会得到众多主机厂的青睐呢?不妨先看一看高通座舱SoC芯片的迭代历程。


通过上图对比高通的四代座舱芯片,能够从侧面反映出:智能座舱的算力需求在不断增长,不管是CPU算力(DMIPS)、GPU算力(FLOPS)或者是NPU算力(TOPS)
1、注解:
汽车芯片中,CPU、GPU和NPU各自扮演着重要的角色,尤其是在自动驾驶、车载信息娱乐系统和车辆控制等方面。以下是这些处理器在汽车芯片中的一些应用和性能指标
1. CPU(中央处理器)
- DMIPS(Dhrystone Millions of Instructions Per Second):DMIPS是衡量CPU性能的传统指标,表示CPU每秒可以执行多少百万条Dhrystone指令。在汽车芯片中,CPU主要负责处理车辆的控制逻辑、操作系统和用户界面等任务。
- 应用:车辆控制单元(VCU)、车载信息娱乐系统、车辆诊断系统等。
2. GPU(图形处理器)
- FLOPS(Floating Point Operations Per Second):GPU的FLOPS是衡量其处理浮点运算能力的关键指标。在汽车芯片中,GPU通常用于处理复杂的图形渲染任务,如仪表盘显示、导航系统和高级驾驶辅助系统(ADAS)中的图像处理。
- 应用:车载导航系统、仪表盘显示、ADAS中的图像和视频处理。
3. NPU(神经处理单元)
- TOPS(Tera Operations Per Second):NPU的TOPS表示其每秒可以执行的万亿次运算。NPU特别擅长处理深度学习算法中的矩阵运算和卷积运算,这些运算在自动驾驶和机器学习应用中非常关键。
- 应用:自动驾驶系统、车辆感知系统、语音识别和自然语言处理。
2、具体应用示例
- 自动驾驶:自动驾驶系统需要处理大量的传感器数据,如雷达、摄像头和激光雷达(LiDAR)。NPU在这里扮演着关键角色,通过深度学习算法进行物体识别、路径规划和决策制定。
- 车载信息娱乐系统:GPU在处理高分辨率的图形和视频内容方面表现出色,为驾驶员和乘客提供丰富的视觉体验。
- 车辆控制:CPU负责处理车辆的基本控制逻辑,如发动机控制、制动系统和转向系统。
3、性能指标的重要性
- DMIPS:在汽车芯片中,CPU的DMIPS越高,其处理复杂控制逻辑和多任务的能力越强。
- FLOPS:GPU的FLOPS越高,其处理复杂图形和视频的能力越强,这对于提供高质量的视觉体验至关重要。
- TOPS:NPU的TOPS越高,其处理深度学习算法的能力越强,这对于自动驾驶和智能感知系统至关重要。
随着技术的发展,汽车芯片的设计也在不断进步,以满足更高的性能和安全要求。选择合适的处理器和性能指标对于实现高效的汽车系统至关重要。
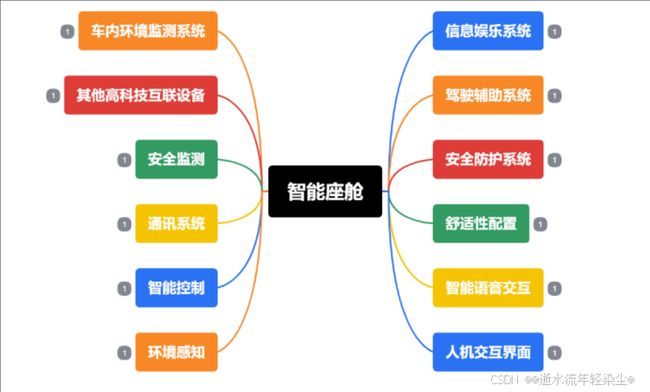
二、智能座舱包含哪些功能
三、智能座舱测试包括:
-
功能测试:测试座舱的各种功能是否正常,如智能控制系统、人机交互系统等。
- 故障诊断测试:测试座舱在工作过程中是否能够及时检测和诊断出故障,并给出相应的提示和建议。
- 性能测试:测试座舱在行驶中的性能和响应速度,同时测试涉及到座舱的硬件、软件和连接个个方面,如连接的音响、蓝牙、无线网络等的稳定性。
- 安全测试:测试座舱的安全特性,如驾驶员注意力提醒功能、智能制动辅助系统等。
- 兼容性测试:测试仪表模块与车辆的硬件和软件系统的兼容性。
- 用户界面测试:检查仪表界面的响应时间和交互体验,确保流畅操作和良好的用户反馈。
- 自动化测试:使用自动化测试软件,如AutoTest-X,进行高精度图像对比、纯软件触控激励、语音识别、总线信号测试等方面的测试。
- 回归测试:在功能更新或修复后,验证座舱功能是否正常,确保软件版本变更不会引入新的问题。
- 疲劳度测试:模拟长时间使用和高负载情况下的稳定性,以确保座舱在长期使用中不会出现性能下降或故障。
- 安全性措施测试:检查仪表模块的安全性措施,如数据加密、权限管理等。验证仪表模块对于恶意攻击和入侵的防护能力。检查仪表模块的警告和提示机制,以确保及时提醒驾驶员注意事项。
- 硬件与软件的集成测试:确保硬件和软件之间的协调工作,没有冲突或不兼容的情况。
- 射频通信测试:测试座舱内的射频通信功能,如FM/RDS, Bluetooth, WLAN, GNSS等,确保信号接收和发送的稳定性和准确性。
- 数据上行与下行测试:验证云平台数据上传(数据上行)和远程车控(数据下行)的稳定性和可靠性。
- 系统集成测试:将智能座舱的所有组件集成在一起进行整体测试,确保各个部分能够协同工作,达到预期的性能和功能要求。
- 定制化配置测试:验证仪表模块的个性化设置和配置选项,如显示语言、显示单位等。
- 国际化和本地化测试:确保仪表模块在不同地域和文化背景下都能够正确地显示和操作。
- 音频测试:验证音响系统的音质、音量控制、噪音抑制等功能的正常工作。
- 视频测试:检查车载娱乐系统中的视频播放功能,包括高清视频播放、视频格式兼容性等。
- 环境适应性测试:模拟极端环境条件(如高温、低温、潮湿、干燥等)下座舱的性能表现,以评估其稳定性和可靠性。
- 人体工程学测试:评估驾驶员在使用智能座舱时的舒适度、操作便利性和安全性,以满足人机交互的最佳体验。
- 用户体验测试:邀请真实用户在各种驾驶场景下体验智能座舱的功能和性能,收集用户反馈以改进产品。
- 验收测试:按照预定的标准和规范对智能座舱进行全面检测,确保其满足设计要求并适合正式发布。
- 可维护性测试:评估智能座舱的故障排查和软件更新等方面的可维护性。
- 可靠性测试:通过长时间运行和反复使用来检验智能座舱的可靠性和耐久性。
- 安全性漏洞测试:寻找并验证智能座舱中可能存在的安全漏洞,以提高产品的安全性。
- 法规合规性测试:确保智能座舱符合相关国家和地区的法律法规要求,特别是在自动驾驶功能方面。
- 数据保护与隐私测试:验证智能座舱在数据保护和隐私方面的合规性,确保用户数据的安全性和隐私性。
- 持续集成与持续部署(CI/CD)测试:在开发过程中定期自动进行代码审查、构建、集成和部署,以减少错误和提高开发效率。
- 灰度发布测试:逐步推广智能座舱的新版本或新功能,先在小范围内进行测试,再逐步扩大范围,以降低风险并收集用户反馈。
- A/B测试:同时展示两种不同的设计方案或功能给一部分用户,收集反馈并比较哪种方案更有效或更受欢迎
四、智能座舱HIL测试系统
1、智能数字座舱HIL自动化测试系统框图如下:

2、智能座舱HIL测试系统架构
2.1测试范围:
● 图像识别(UI/UE):指针类示数测试,图标类显示测试,图标类颜色测试,图标类闪烁测试,字符类显示测试,亮度趋势测试,视频录像功能
● 摄像头仿真:RGB原色图片或自定义图片
● 语音识别:声音频谱分析,报警音音高及间隔,方言识别&语义识别(结合第三方SDK)
● 语音合成:男女音色切换,英语/普通话,方言合成(结合第三方SDK)
● 物理触控模拟:单击,双击,滑动,连续点击,多指的点击或滑动(四指或五指)
● 总线信号测试:CAN/CANFD/LIN/Ethernet/J1939等
● I/O信号测试:电压,电流,温度,PWM等
● 射频通信测试:FM/RDS,Bluetooth,WLAN,GNSS等
● 云平台通信测试:数据上行(云端数据上传),数据下行(远程车控),FOTA
2.2系统亮点:
● 多种图像采集处理方式 – 工业相机/EPT图像采集板卡/ADB图像采集
● EPT图像采集板卡可以进行图像数据的透明监控,对ECU输出到屏幕的图像数据做无损还原
● 多种方案模拟屏幕触控 – ADB指令/机械手/I2C
● EPT触控仿真板卡可以脱离对OS的依赖,快速模拟手指对屏幕的触控动作
● 支持图标批量导入和标定,提高测试实施效率
● EPT自研的图像采集板卡和摄像头仿真板卡可用于DV耐久性测试,提升HIL系统可靠性
● 表格化/图形化的脚本编辑,降低用户编程难度,快速上手
● 根据客户需求自定义测试报告