Livox_Mid360+IMU仿真搭建
前言
本文是对在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2的实现,此博文中存在部分需要修改代码的地方,因此在本文中做出更详细的说明。
资源包安装
注:由于livox点云的格式是CustomMsg,而rviz中主要使用PointCloud和PointCloud2,转换不太方便,因此不使用官方提供的软件包,使用他人修改后的软件包。但此软件包开发时间较早,缺少mid360相关的文件,在文末提供了mid360相关文件的下载链接,也可直接从官方链接下载
cd ~/catkin_ws/src
git clone https://github.com/Luchuanzhao/Livox_simulation_customMsg.git
mv Livox_simulation_customMsg livox_laser_simulation
还需安装livox_ros_driver
cd ~/catkin_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
再修改csv文件路径/点云格式
mid360.csv文件可从提供的资源包中得到
#将第54行改为实际的csv文件路径
cd ~/catkin_ws/src/livox_laser_simulation/src
code livox_points_plugin.cpp
#例如(/home/byy/catkin_ws/src/livox_laser_simulation/scan_mode/mid360.csv)
#将101行改为自己所需要的点云格式:0->PointCloud;1/2->PointCloud2;3->CustomMsg
#例如:publishPointCloudType = 1;
还需注释掉340、341行的坐标变换代码,要不然rviz中得不到图像
//tfBroadcaster->sendTransform(
// tf::StampedTransform(tf, ros::Time::now(), raySensor->ParentName(), raySensor->Name()));
模型搭建
cd ~/catkin_ws/src/livox_laser_simulation/urdf
code mid360_IMU_platform.xacro
使用原博文提供的xacro代码,并修改其中的部分细节,具体如下。
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="example">
<link name="base_footprint" />
<xacro:macro name="LivoxMid360_IMU_Plantform" params="name:=mid360_imu_plantform parent_link_name:=base_link x:=0.0 y:=0.0 z:=0.05 r:=0.0 p:=0.0 yaw:=0.0">
<joint name="${name}_joint" type="fixed" >
<parent link="${parent_link_name}" />
<child link="link_platform" />
<origin xyz="${x} ${y} ${z}" rpy="${r} ${p} ${yaw}" />
joint>
<link name="link_platform" >
<visual>
<geometry>
<box size="0.15 0.1 0.1" />
geometry>
visual>
<collision>
<geometry>
<box size="0.15 0.1 0.1" />
geometry>
collision>
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.001"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0"
izz="0.001" />
inertial>
link>
<gazebo reference="link_platform">
<turnGravityOff>falseturnGravityOff>
gazebo>
<joint name="lidar_platform_joint" type="fixed" >
<parent link="link_platform" />
<child link="livox_base" />
<origin xyz="0 0 0.08" rpy="0 0 0" />
joint>
<xacro:include filename="$(find livox_laser_simulation)/urdf/livox_mid360.xacro"/>
<link name="imu_base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.03 0.03 0.03" />
geometry>
visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.03 0.03 0.03" />
geometry>
collision>
<inertial>
<mass value="0.001"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001"/>
inertial>
link>
<gazebo reference="imu_base_link">
<material>Gazebo/Greenmaterial>
<turnGravityOff>falseturnGravityOff>
gazebo>
<joint name="imu_platform_joint" type="fixed">
<parent link="link_platform"/>
<child link="imu_base_link"/>
<origin xyz="0.05 0 0.065" rpy="0 0 0" />
<axis xyz="0 0 1" />
joint>
<gazebo reference="imu_base_link">
<gravity>truegravity>
<sensor name="imu_sensor" type="imu">
<always_on>truealways_on>
<update_rate>200update_rate>
<visualize>truevisualize>
<topic>/livox/imutopic>
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<topicName>/livox/imutopicName>
<bodyName>imu_base_linkbodyName>
<updateRateHZ>200.0updateRateHZ>
<gaussianNoise>0.00329gaussianNoise>
<xyzOffset>0 0 0xyzOffset>
<rpyOffset>0 0 0rpyOffset>
<frameName>imu_base_linkframeName>
plugin>
<pose>0 0 0 0 0 0pose>
sensor>
gazebo>
xacro:macro>
<xacro:LivoxMid360_IMU_Plantform/>
robot>
在meshes文件夹中引入提供的mid360.dae、mid360_rules.dae文件
还需在urdf文件夹中编写livox_mid360.xacro文件,并修改部分代码,具体如下。
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="laser_min_range" value="0.1"/>
<xacro:property name="laser_max_range" value="200.0"/>
<xacro:property name="ros_topic" value="scan"/>
<xacro:property name="samples" value="24000"/>
<xacro:property name="downsample" value="1"/>
<xacro:macro name="null_inertial">
<inertial>
<mass value="0.1"/>
<inertia ixx="0.01" ixy="0" ixz="0"
iyy="0.01" iyz="0"
izz="0.01"/>
inertial>
xacro:macro>
<xacro:macro name="Livox_Mid_gazebo_sensor" params="visualize:=True update_rate:=10 resolution:=0.002 noise_mean:=0.0 noise_stddev:=0.01 name:=livox">
<gazebo reference="${name}">
<sensor type="ray" name="laser_${name}">
<pose>0 0 0 0 0 0pose>
<visualize>${visualize}visualize>
<update_rate>${update_rate}update_rate>
<plugin name="gazebo_ros_laser_controller" filename="liblivox_laser_simulation.so">
<ray>
<scan>
<horizontal>
<samples>100samples>
<resolution>1resolution>
<min_angle>0min_angle>
<max_angle>${2*M_PI}max_angle>
horizontal>
<vertical>
<samples>360samples>
<resolution>1resolution>
<min_angle>${-3.22/180*M_PI}min_angle>
<max_angle>${56.22/180*M_PI}max_angle>
vertical>
scan>
<range>
<min>0.1min>
<max>30max>
<resolution>0.02resolution>
range>
<noise>
<type>gaussiantype>
<mean>0.0mean>
<stddev>0.0stddev>
noise>
ray>
<visualize>${visualize}visualize>
<samples>${samples}samples>
<downsample>${downsample}downsample>
<csv_file_name>package://livox_laser_simulation/scan_mode/mid360.csvcsv_file_name>
<ros_topic>${ros_topic}ros_topic>
plugin>
sensor>
gazebo>
xacro:macro>
<xacro:macro name="Livox_Mid40" params="visualize:=True name:=livox">
<link name="${name}_base">
<xacro:null_inertial/>
<visual>
<origin xyz="0.00 0 0.0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://livox_laser_simulation/meshes/mid360.dae">
mesh>
geometry>
visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh
filename="package://livox_laser_simulation/meshes/mid360_rules.dae">
mesh> geometry>
collision>
link>
<link name="${name}">
<xacro:null_inertial/>
link>
<joint name="${name}_to_${name}_base_joint" type="fixed">
<parent link="${name}_base"/>
<child link="${name}"/>
<origin rpy="0 0 0" xyz="-0.012 0.0 0.047"/>
joint>
<xacro:Livox_Mid_gazebo_sensor name="${name}" visualize="${visualize}"/>
xacro:macro>
<xacro:Livox_Mid40 name="livox"/>
robot>
编写launch文件
cd ~/catkin_ws/src/livox_laser_simulation/launch
code mid360_IMU_platform.launch
<launch>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch" >
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="headless" value="$(arg headless)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="verbose" value="$(arg verbose)"/>
include>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find livox_laser_simulation)/urdf/mid360_IMU_platform.xacro' " />
<node pkg="gazebo_ros" type="spawn_model" name="spawn_model" args="-urdf -param /robot_description -model example"/>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
node>
<arg name="rviz" default="true"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find livox_laser_simulation)/rviz/livox_simulation.rviz"/>
launch>
编译运行
cd ~/catkin_ws
catkin_make
注:有时修改完文件立刻编译会报错:
fatal error: livox_ros_driver/CustomMsg.h:No such file and directory
主要原因应该是多线程编译导致的,将终端关闭,重新编译即可
参考:https://blog.csdn.net/qq_59475883/article/details/127758942
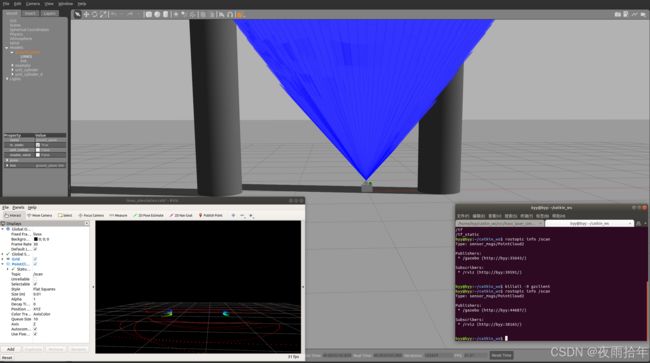
roslaunch livox_laser_simulation mid360_IMU_platform.launch
资源下载
链接: https://pan.baidu.com/s/17x61LmNLG7_-S4OY7IuE7Q?pwd=1234 提取码: 1234