读取机器人移动轨迹并在RVIZ界面中显示(ROS1)
文章目录
- 前言
- 一、准备
-
- 1.坐标系
- 2.ros下的路径消息格式
- 二、实现过程
-
- 1.轨迹保存
- 2.轨迹读取并显示
前言
机器人在巡检过程中需要沿着固定路线执行任务,因此可以先把机器人的移动轨迹录制并保存下来,之后读取轨迹,方便后续操作。
一、准备
1.坐标系
巡检导航过程中,机器人需要确定好坐标系,以便进行定位与导航,在gazebo仿真下可以选择world坐标系,在实际使用中通常使用的是map坐标系,这里以map坐标系为例进行介绍。
2.ros下的路径消息格式
rosmsg show nav_msgs/Path
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseStamped[] poses
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
二、实现过程
1.轨迹保存
思路:使用/amcl_pose话题获取机器人当前的位置信息,用nav_msgs::Path格式的一个变量Path进行保存,控制机器人的运动,当机器人运动距离超过某一数值时,将当前位置pose加入该变量,直到机器人走完预设的路径。之后遍历Path中路径点保存输出CSV文本即可。
#include 运行上述程序后,控制小车运动,当走完所需的路径后,需单独发送一个话题,从而启动路径保存
rostopic pub /start_end_record std_msgs/String "data: 'end'"
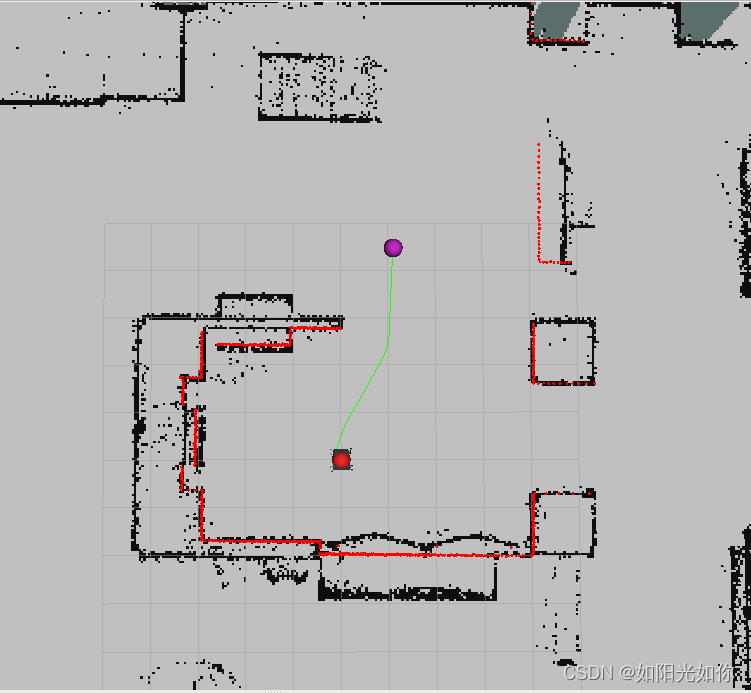
2.轨迹读取并显示
思路:读取CSV文本并分割,将路径点发布出去。
这里也发布了路径起点和终点位置。
#include
path_pose.header.frame_id = "/map";
path_pose.header.stamp =ros::Time::now();
path_pose.header.seq = 0;
line_num++;
strbuf = split(line, ",");
path_pose.pose.position.x = atof(strbuf[0].c_str());
path_pose.pose.position.y = atof(strbuf[1].c_str());
path_pose.pose.position.z = 0.0;
/*
float yaw = atof(strbuf[2].c_str());
quat = tf::createQuaternionMsgFromYaw(yaw);
path_pose.pose.orientation.x = quat.x;
path_pose.pose.orientation.y = quat.y;
path_pose.pose.orientation.z = quat.z;
path_pose.pose.orientation.w = quat.w;
*/
path_pose.pose.orientation.z = std::sin(atof(strbuf[1].c_str())/2.0);
path_pose.pose.orientation.w = std::cos(atof(strbuf[1].c_str())/2.0);
nav_path.poses.push_back(path_pose);
}
path_pub.publish(nav_path);
ros::Duration(1).sleep();
path_end_pub.publish(nav_path.poses[nav_path.poses.size()-1]);
// std::cout<<"----2-----"<
path_start_pub.publish(nav_path.poses[0]);
ros::spinOnce();
r.sleep();
}
return 0;
}
在rviz中添加话题名称,结果如图: