【电网yyds】基于数据驱动的电力系统故障恢复研究(10机39节点)(Matlab代码实现)
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
⛳️赠与读者
1 概述
2 运行结果
3 参考文献
4 Matlab代码、数据下载
⛳️赠与读者
做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......
1 概述
基于数据驱动的电力系统故障恢复研究(10机39节点)
一、引言
随着科学技术的发展和电能需求量的日益增长,电力系统规模越来越庞大,超高压远距离输电、大容量发电机组、各种新型控制装置得到了广泛的应用。电力系统的稳定运行直接影响着人们的日常生活。然而,电力系统在运行过程中不可避免地会遭遇各种故障,故障恢复成为保障电力供应可靠性的关键环节。传统的故障恢复方法往往依赖于经验和预设的规则,难以适应复杂多变的电网运行状况。数据驱动的方法能够充分利用电力系统运行过程中产生的大量数据,挖掘其中蕴含的规律,为故障恢复提供更为智能、高效的解决方案。本文聚焦于基于数据驱动的 10 机 39 节点电力系统故障恢复研究,旨在探索一种有效的故障恢复策略。
二、10 机 39 节点电力系统概述
2.1 系统结构
十机 39 节点系统共有 10 台发电机,39 个节点,共 46 条支路,其中 5 条为联络开关支路、1 个电源作为平衡节点。从拓扑图中可以看出,0 至 17 节点作为干线,由干线分别从 1、2、5 节点引出分支。
2.2 元件参数
-
负荷参数:需根据实际的电力需求和用电特性进行设定,不同节点的负荷参数反映了该节点所连接的各类用电设备的功率消耗情况。
-
线路、变压器参数:线路参数包括电阻、电抗、电容等,变压器参数如变比、短路阻抗等。这些参数决定了电力在系统中的传输特性和损耗情况。
-
发电机参数:涵盖额定功率、额定电压、同步电抗、暂态电抗等,是描述发电机电气性能的关键指标。
-
励磁参数:用于调节发电机的励磁电流,进而控制发电机的输出电压和无功功率,对电力系统的稳定性有重要影响。
三、数据驱动方法在故障恢复中的应用原理
3.1 数据采集与预处理
在电力系统中,通过各种监测设备,如传感器、电表等,实时采集多个节点的电压、电流、功率等运行数据。这些原始数据可能存在噪声、缺失值等问题,需要进行预处理,包括数据清洗、去噪、填补缺失值等操作,以提高数据质量,为后续分析提供可靠的数据基础。
3.2 故障特征提取
利用数据挖掘和机器学习技术,从预处理后的数据中提取与故障相关的特征。例如,在故障发生时,节点电压的变化趋势、电流的突变情况、功率的波动模式等都可能成为表征故障类型和位置的关键特征。可以采用主成分分析(PCA)、小波变换等方法对数据进行特征提取,降低数据维度的同时保留关键信息。
3.3 故障诊断与定位
基于提取的故障特征,构建故障诊断模型。常见的方法有决策树、支持向量机(SVM)、神经网络等。通过大量的历史故障数据对模型进行训练和优化,使其能够准确地识别不同类型的故障,并确定故障发生的位置。例如,利用深度学习中的卷积神经网络(CNN)对故障数据的特征进行深度挖掘,实现高精度的故障诊断与定位。
3.4 故障恢复策略制定
根据故障诊断和定位的结果,结合电力系统的运行状态和约束条件,制定合理的故障恢复策略。这可以借助优化算法,如遗传算法、粒子群优化算法等,以恢复供电的可靠性、安全性和经济性为目标,搜索最优的开关操作方案,实现快速、有效的故障恢复。
四、基于 10 机 39 节点系统的仿真实验
4.1 MATLAB 程序实现
实际以第2部分运行结果为准。
编写 MATLAB 程序,实现数据的采集、处理、故障特征提取、故障诊断与定位以及故障恢复策略的制定。程序应具备良好的可读性和可扩展性,便于后续的修改和优化。例如,通过编写函数实现不同算法的功能,利用脚本文件调用这些函数,完成整个故障恢复流程的模拟。
4.2 运行结果
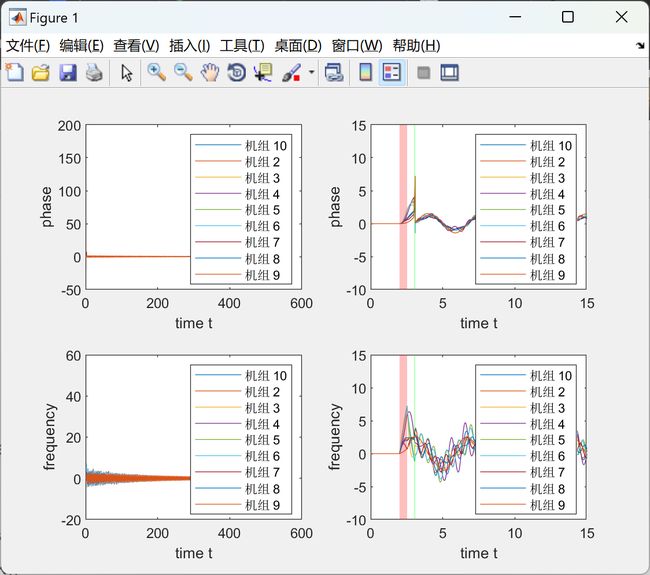
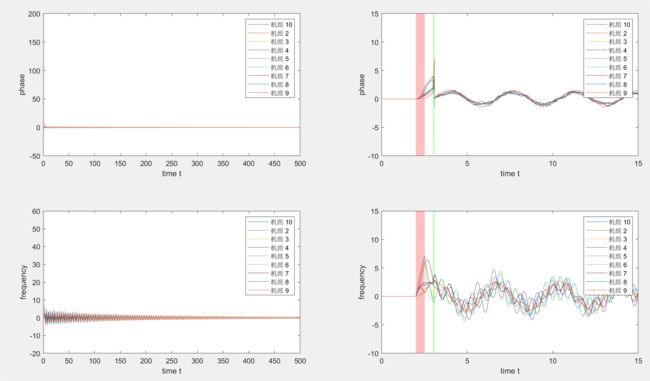
在设定不同类型和位置的故障场景下,运行仿真模型和程序。记录故障发生前后系统各节点的电压、电流、功率等参数的变化情况,以及故障诊断与恢复的结果。例如,当在某一线路发生三相短路故障时,模型输出各节点电压的波动曲线、故障诊断结果(故障类型和位置)以及最终的故障恢复方案(开关操作顺序)。
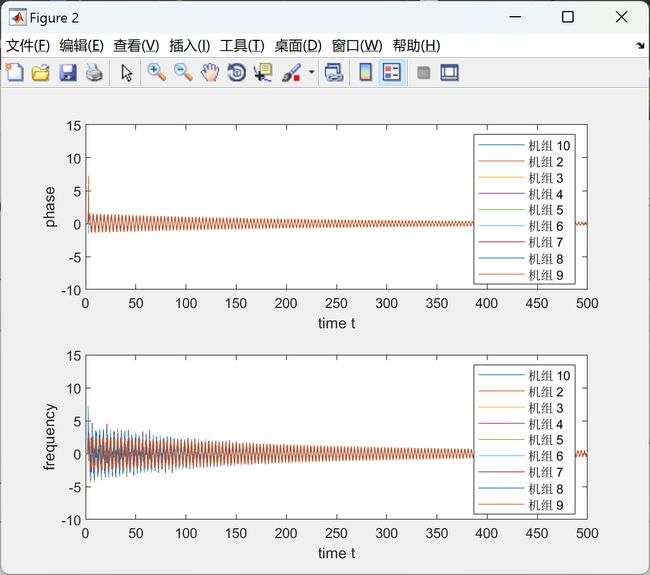
4.4 结果分析
对运行结果进行分析,评估数据驱动方法在故障恢复中的有效性。从故障诊断的准确率、故障恢复的时间、恢复后系统的稳定性等方面进行考量。例如,分析不同故障场景下故障诊断的误报率和漏报率,对比传统方法和数据驱动方法在故障恢复时间上的差异,观察恢复后系统各节点电压和功率是否在允许范围内,以验证系统的稳定性。
五、总结
本文基于 10 机 39 节点电力系统,对数据驱动的故障恢复方法进行了研究。通过搭建仿真模型和编写 MATLAB 程序,模拟了多种故障场景下的数据采集、处理以及故障恢复过程。结果表明,数据驱动的方法能够有效地提高故障诊断的准确性和故障恢复的效率,为保障电力系统的可靠运行提供了一种新的途径。然而,实际电力系统更为复杂,未来还需要进一步考虑更多的因素,如分布式电源的接入、电网的动态变化等,以不断完善数据驱动的故障恢复策略。
2 运行结果
部分代码:
%% simulate fault (discretized swing equations)
for t = tspan
yy(:,k) = swing(t,delta_t,y0,zeros(1,m));
y0 = yy(:,k);
k = k+1;
end
% initial state control
x0 = yy(:,round(t_c/delta_t));
% plot results
figure(1)
subplot(2,2,1)
plot(tspan,yy(1:9,:))
hold on
fill([T_fault_in T_fault_in T_fault_end T_fault_end], [-20 200 200 -20], 'r','FaceAlpha',0.25,'LineStyle','none');
ylabel('phase');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
subplot(2,2,3)
plot(tspan,yy(10:18,:))
hold on
fill([T_fault_in T_fault_in T_fault_end T_fault_end], [-20 60 60 -20], 'r','FaceAlpha',0.25,'LineStyle','none');
ylabel('frequency');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
%% generate data for control
% number of samples
N = 5000;
% variance of inital states
sigma = 0.01;
% data matrices
U = [];
X0 = [];
X1T = [];
XT = [];
for i=1:N
k = 1;
% random input
u = 1e-3*randn(m,round(T/delta_t));
% random initial state
y0 = [0.1564+sigma*randn 0.1806+sigma*randn 0.1631+sigma*randn 0.3135+sigma*randn 0.1823+sigma*randn 0.1849+sigma*randn 0.1652+sigma*randn 0.2953+sigma*randn -0.06165+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn 0+sigma*randn]';
y0 = [sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn sigma*randn]';
y0_data = y0;
for t = 0:delta_t:T-delta_t
y_data(:,k) = swing(t,delta_t,y0_data,u(:,k));
y0_data = y_data(:,k);
k = k+1;
end
U = [U reshape(fliplr(u),[m*round(T/delta_t),1])];
X0 = [X0 y0];
X1T = [X1T reshape(fliplr(y_data(:,1:round(T/delta_t-1))),[n*round(T/delta_t-1),1])];
XT = [XT y_data(:,end)];
end
%% compute data-driven control
U = U(:,1:3750);
XT = XT(:,1:3750);
X0 = X0(:,1:3750);
X1T = X1T(:,1:3750);
K_X0 = null(X0,1e-10);
K_U = null(U,1e-10);
xf_c = (xf-(XT*K_U*pinv(X0*K_U,1e-10))*x0);
U = U*K_X0;
X1T = X1T*K_X0;
XT = XT*K_X0;
K_U = null(U,1e-10);
K_XT = null(XT,1e-10);
Q = 5e-3;
R = 1;
L2 = Q*((X1T)'*(X1T))+R*(U'*U);
L = cholcov(L2);
[W,S,V]=svds(L*K_XT,m*round(T/delta_t)-n);
u_opt = U*pinv(XT,1e-10)*xf_c-U*K_XT*pinv(W*S*V',1e-10)*L*pinv(XT,1e-10)*xf_c;
u_opt_seq = fliplr(reshape(u_opt,[m,round(T/delta_t)]));
%% apply control for fault recovery
u_opt_seq = [zeros(9,round(t_c/delta_t+1)) u_opt_seq zeros(9,round(500/delta_t))];
y0 = [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0]';
k = 1;
tspan = 0:delta_t:500;
for t = tspan
yy(:,k) = swing(t,delta_t,y0,u_opt_seq(:,k));
y0 = yy(:,k);
k = k+1;
end
% plot results
figure(1)
subplot(2,2,2)
plot(0:delta_t:T_sim,yy(1:9,1:round(T_sim/delta_t)+1))
hold on
fill([T_fault_in T_fault_in T_fault_end T_fault_end], [-10 15 15 -10], 'r','FaceAlpha',0.25,'LineStyle','none');
hold on
fill([t_c t_c t_c+T t_c+T], [-10 15 15 -10], 'g','FaceAlpha',0.25,'LineStyle','none');
ylabel('phase');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
subplot(2,2,4)
plot(0:delta_t:T_sim,yy(10:18,1:round(T_sim/delta_t)+1))
hold on
fill([T_fault_in T_fault_in T_fault_end T_fault_end], [-10 15 15 -10], 'r','FaceAlpha',0.25,'LineStyle','none');
hold on
fill([t_c t_c t_c+T t_c+T], [-10 15 15 -10], 'g','FaceAlpha',0.25,'LineStyle','none');
ylabel('frequency');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
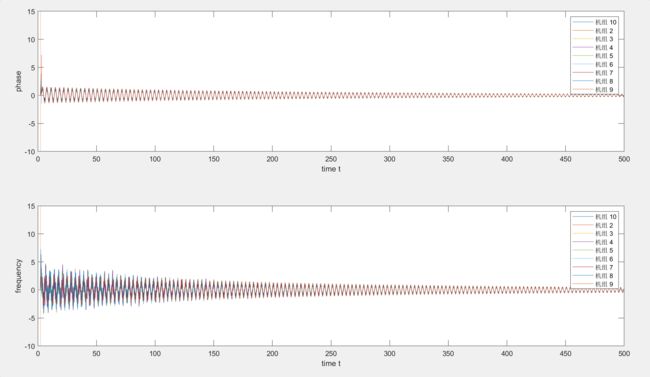
%asymptotic behavior
figure(2)
subplot(2,1,1)
plot(tspan,yy(1:9,:))
hold on
fill([2 2 2.4 2.4], [-10 15 15 -10], 'r','FaceAlpha',0.25,'LineStyle','none');
hold on
fill([t_c t_c t_c+T t_c+T], [-10 15 15 -10], 'g','FaceAlpha',0.25,'LineStyle','none');
ylabel('phase');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
subplot(2,1,2)
plot(tspan,yy(10:18,:))
hold on
fill([2 2 2.4 2.4], [-10 15 15 -10], 'r','FaceAlpha',0.25,'LineStyle','none');
hold on
fill([t_c t_c t_c+T t_c+T], [-10 15 15 -10], 'g','FaceAlpha',0.25,'LineStyle','none');
ylabel('frequency');
xlabel('time t');
legend('gen 10','gen 2','gen 3','gen 4','gen 5','gen 6','gen 7','gen 8','gen 9')
function yp= swing(t,delta_t,y,u)
% simulate power generators swing dynamics
global H P D E Y3 Y32 T_fault_in T_fault_end
yp = zeros(18,1);
Y = Y3;
k = [delta_t*(1/H(2,2))*(P(2)-real(Y(2,2))*E(2)^2-E(2)*E(1)*real(Y(2,1))-E(2)*E(3)*real(Y(2,3))- E(2)*E(4)*(real(Y(2,4)))-E(2)*E(5)*(real(Y(2,5)))-E(2)*E(6)*(real(Y(2,6)))-E(2)*E(7)*(real(Y(2,7)))-E(2)*E(8)*(real(Y(2,8)))-E(2)*E(9)*(real(Y(2,9)))-E(2)*E(10)*(real(Y(2,10))));
delta_t*(1/H(3,3))*(P(3)-real(Y(3,3))*E(3)^2-E(3)*E(1)*(real(Y(3,1)))-E(3)*E(2)*(real(Y(3,2)))-E(3)*E(4)*(real(Y(3,4)))-E(3)*E(5)*(real(Y(3,5)))-E(3)*E(6)*(real(Y(3,6)))-E(3)*E(7)*(real(Y(3,7)))-E(3)*E(8)*(real(Y(3,8)))-E(3)*E(9)*(real(Y(3,9)))-E(3)*E(10)*(real(Y(3,10))));
delta_t*(1/H(4,4))*(P(4)-real(Y(4,4))*E(4)^2-E(4)*E(1)*(real(Y(4,1)))-E(4)*E(2)*(real(Y(4,2)))-E(4)*E(3)*(real(Y(4,3)))-E(4)*E(5)*(real(Y(4,5)))-E(4)*E(6)*(real(Y(4,6)))-E(4)*E(7)*(real(Y(4,7)))-E(4)*E(8)*(real(Y(4,8)))-E(4)*E(9)*(real(Y(4,9)))-E(4)*E(10)*(real(Y(4,10))));
delta_t*(1/H(5,5))*(P(5)-real(Y(5,5))*E(5)^2-E(5)*E(1)*(real(Y(5,1)))-E(5)*E(2)*(real(Y(5,2)))-E(5)*E(3)*(real(Y(5,3)))-E(5)*E(4)*(real(Y(5,4)))-E(5)*E(6)*(real(Y(5,6)))-E(5)*E(7)*(real(Y(5,7)))-E(5)*E(8)*(real(Y(5,8)))-E(5)*E(9)*(real(Y(5,9)))-E(5)*E(10)*(real(Y(5,10))));
delta_t*(1/H(6,6))*(P(6)-real(Y(6,6))*E(6)^2-E(6)*E(1)*(real(Y(6,1)))-E(6)*E(2)*(real(Y(6,2)))-E(6)*E(3)*(real(Y(6,3)))-E(6)*E(4)*(real(Y(6,4)))-E(6)*E(5)*(real(Y(6,5)))-E(6)*E(7)*(real(Y(6,7)))-E(6)*E(8)*(real(Y(6,8)))-E(6)*E(9)*(real(Y(6,9)))-E(6)*E(10)*(real(Y(6,10))));
delta_t*(1/H(7,7))*(P(7)-real(Y(7,7))*E(7)^2-E(7)*E(1)*(real(Y(7,1)))-E(7)*E(2)*(real(Y(7,2)))-E(7)*E(3)*(real(Y(7,3)))-E(7)*E(4)*(real(Y(7,4)))-E(7)*E(5)*(real(Y(7,5)))-E(7)*E(6)*(real(Y(7,6)))-E(7)*E(8)*(real(Y(7,8)))-E(7)*E(9)*(real(Y(7,9)))-E(7)*E(10)*(real(Y(7,10))));
delta_t*(1/H(8,8))*(P(8)-real(Y(8,8))*E(8)^2-E(8)*E(1)*(real(Y(8,1)))-E(8)*E(2)*(real(Y(8,2)))-E(8)*E(3)*(real(Y(8,3)))-E(8)*E(4)*(real(Y(8,4)))-E(8)*E(5)*(real(Y(8,5)))-E(8)*E(6)*(real(Y(8,6)))-E(8)*E(7)*(real(Y(8,7)))-E(8)*E(9)*(real(Y(8,9)))-E(8)*E(10)*(real(Y(8,10))));
delta_t*(1/H(9,9))*(P(9)-real(Y(9,9))*E(9)^2-E(9)*E(1)*(real(Y(9,1)))-E(9)*E(2)*(real(Y(9,2)))-E(9)*E(3)*(real(Y(9,3)))-E(9)*E(4)*(real(Y(9,4)))-E(9)*E(5)*(real(Y(9,5)))-E(9)*E(6)*(real(Y(9,6)))-E(9)*E(7)*(real(Y(9,7)))-E(9)*E(8)*(real(Y(9,8)))-E(9)*E(10)*(real(Y(9,10))));
delta_t*(1/H(10,10))*(P(10)-real(Y(10,10))*E(10)^2-E(10)*E(1)*(real(Y(10,1)))-E(10)*E(2)*(real(Y(10,2)))-E(10)*E(3)*(real(Y(10,3)))-E(10)*E(4)*(real(Y(10,4)))-E(10)*E(5)*(real(Y(10,5)))-E(10)*E(6)*(real(Y(10,6)))-E(10)*E(7)*(real(Y(10,7)))-E(10)*E(8)*(real(Y(10,8)))-E(10)*E(9)*(real(Y(10,9))))];
if t<2
Y = Y3;
elseif t>=T_fault_in && t
else
Y = Y3;
end
yp(1) = delta_t*y(10)+y(1)+u(1);
yp(2) = delta_t*y(11)+y(2)+u(2);
yp(3) = delta_t*y(12)+y(3)+u(3);
yp(4) = delta_t*y(13)+y(4)+u(4);
yp(5) = delta_t*y(14)+y(5)+u(5);
yp(6) = delta_t*y(15)+y(6)+u(6);
yp(7) = delta_t*y(16)+y(7)+u(7);
yp(8) = delta_t*y(17)+y(8)+u(8);
yp(9) = delta_t*y(18)+y(9)+u(9);
yp(10) = delta_t*(1/H(2,2))*(-D(2,2)*(y(10)+u(1))+P(2)-real(Y(2,2))*E(2)^2-...
E(2)*E(1)*(real(Y(2,1))*cos(y(1))+imag(Y(2,1))*sin(y(1)))-...
E(2)*E(3)*(real(Y(2,3))*cos(y(1)-y(2))+imag(Y(2,3))*sin(y(1)-y(2)))-...
E(2)*E(4)*(real(Y(2,4))*cos(y(1)-y(3))+imag(Y(2,4))*sin(y(1)-y(3)))-...
E(2)*E(5)*(real(Y(2,5))*cos(y(1)-y(4))+imag(Y(2,5))*sin(y(1)-y(4)))-...
E(2)*E(6)*(real(Y(2,6))*cos(y(1)-y(5))+imag(Y(2,6))*sin(y(1)-y(5)))-...
E(2)*E(7)*(real(Y(2,7))*cos(y(1)-y(6))+imag(Y(2,7))*sin(y(1)-y(6)))-...
E(2)*E(8)*(real(Y(2,8))*cos(y(1)-y(7))+imag(Y(2,8))*sin(y(1)-y(7)))-...
E(2)*E(9)*(real(Y(2,9))*cos(y(1)-y(8))+imag(Y(2,9))*sin(y(1)-y(8)))-...
E(2)*E(10)*(real(Y(2,10))*cos(y(1)-y(9))+imag(Y(2,10))*sin(y(1)-y(9))))+y(10)-k(1);
yp(11) = delta_t*(1/H(3,3))*(-D(3,3)*(y(11)+u(2))+P(3)-real(Y(3,3))*E(3)^2-...
E(3)*E(1)*(real(Y(3,1))*cos(y(2))+imag(Y(3,1))*sin(y(2)))-...
E(3)*E(2)*(real(Y(3,2))*cos(y(2)-y(1))+imag(Y(3,2))*sin(y(2)-y(1)))-...
E(3)*E(4)*(real(Y(3,4))*cos(y(2)-y(3))+imag(Y(3,4))*sin(y(2)-y(3)))-...
E(3)*E(5)*(real(Y(3,5))*cos(y(2)-y(4))+imag(Y(3,5))*sin(y(2)-y(4)))-...
E(3)*E(6)*(real(Y(3,6))*cos(y(2)-y(5))+imag(Y(3,6))*sin(y(2)-y(5)))-...
E(3)*E(7)*(real(Y(3,7))*cos(y(2)-y(6))+imag(Y(3,7))*sin(y(2)-y(6)))-...
E(3)*E(8)*(real(Y(3,8))*cos(y(2)-y(7))+imag(Y(3,8))*sin(y(2)-y(7)))-...
E(3)*E(9)*(real(Y(3,9))*cos(y(2)-y(8))+imag(Y(3,9))*sin(y(2)-y(8)))-...
E(3)*E(10)*(real(Y(3,10))*cos(y(2)-y(9))+imag(Y(3,10))*sin(y(2)-y(9))))+y(11)-k(2);
yp(12) = delta_t*(1/H(4,4))*(-D(4,4)*(y(12)+u(3))+P(4)-real(Y(4,4))*E(4)^2-...
E(4)*E(1)*(real(Y(4,1))*cos(y(3))+imag(Y(4,1))*sin(y(3)))-...
E(4)*E(2)*(real(Y(4,2))*cos(y(3)-y(1))+imag(Y(4,2))*sin(y(3)-y(1)))-...
E(4)*E(3)*(real(Y(4,3))*cos(y(3)-y(2))+imag(Y(4,3))*sin(y(3)-y(2)))-...
E(4)*E(5)*(real(Y(4,5))*cos(y(3)-y(4))+imag(Y(4,5))*sin(y(3)-y(4)))-...
E(4)*E(6)*(real(Y(4,6))*cos(y(3)-y(5))+imag(Y(4,6))*sin(y(3)-y(5)))-...
E(4)*E(7)*(real(Y(4,7))*cos(y(3)-y(6))+imag(Y(4,7))*sin(y(3)-y(6)))-...
E(4)*E(8)*(real(Y(4,8))*cos(y(3)-y(7))+imag(Y(4,8))*sin(y(3)-y(7)))-...
E(4)*E(9)*(real(Y(4,9))*cos(y(3)-y(8))+imag(Y(4,9))*sin(y(3)-y(8)))-...
E(4)*E(10)*(real(Y(4,10))*cos(y(3)-y(9))+imag(Y(4,10))*sin(y(3)-y(9))))+y(12)-k(3);
yp(13) = delta_t*(1/H(5,5))*(-D(5,5)*(y(13)+u(4))+P(5)-real(Y(5,5))*E(5)^2-...
E(5)*E(1)*(real(Y(5,1))*cos(y(4))+imag(Y(5,1))*sin(y(4)))-...
E(5)*E(2)*(real(Y(5,2))*cos(y(4)-y(1))+imag(Y(5,2))*sin(y(4)-y(1)))-...
E(5)*E(3)*(real(Y(5,3))*cos(y(4)-y(2))+imag(Y(5,3))*sin(y(4)-y(2)))-...
E(5)*E(4)*(real(Y(5,4))*cos(y(4)-y(3))+imag(Y(5,4))*sin(y(4)-y(3)))-...
E(5)*E(6)*(real(Y(5,6))*cos(y(4)-y(5))+imag(Y(5,6))*sin(y(4)-y(5)))-...
E(5)*E(7)*(real(Y(5,7))*cos(y(4)-y(6))+imag(Y(5,7))*sin(y(4)-y(6)))-...
E(5)*E(8)*(real(Y(5,8))*cos(y(4)-y(7))+imag(Y(5,8))*sin(y(4)-y(7)))-...
E(5)*E(9)*(real(Y(5,9))*cos(y(4)-y(8))+imag(Y(5,9))*sin(y(4)-y(8)))-...
E(5)*E(10)*(real(Y(5,10))*cos(y(4)-y(9))+imag(Y(5,10))*sin(y(4)-y(9))))+y(13)-k(4);
yp(14) = delta_t*(1/H(6,6))*(-D(6,6)*(y(14)+u(5))+P(6)-real(Y(6,6))*E(6)^2-...
E(6)*E(1)*(real(Y(6,1))*cos(y(5))+imag(Y(6,1))*sin(y(5)))-...
E(6)*E(2)*(real(Y(6,2))*cos(y(5)-y(1))+imag(Y(6,2))*sin(y(5)-y(1)))-...
E(6)*E(3)*(real(Y(6,3))*cos(y(5)-y(2))+imag(Y(6,3))*sin(y(5)-y(2)))-...
E(6)*E(4)*(real(Y(6,4))*cos(y(5)-y(3))+imag(Y(6,4))*sin(y(5)-y(3)))-...
E(6)*E(5)*(real(Y(6,5))*cos(y(5)-y(4))+imag(Y(6,5))*sin(y(5)-y(4)))-...
E(6)*E(7)*(real(Y(6,7))*cos(y(5)-y(6))+imag(Y(6,7))*sin(y(5)-y(6)))-...
E(6)*E(8)*(real(Y(6,8))*cos(y(5)-y(7))+imag(Y(6,8))*sin(y(5)-y(7)))-...
E(6)*E(9)*(real(Y(6,9))*cos(y(5)-y(8))+imag(Y(6,9))*sin(y(5)-y(8)))-...
E(6)*E(10)*(real(Y(6,10))*cos(y(5)-y(9))+imag(Y(6,10))*sin(y(5)-y(9))))+y(14)-k(5);
yp(15) = delta_t*(1/H(7,7))*(-D(7,7)*(y(15)+u(6))+P(7)-real(Y(7,7))*E(7)^2-...
E(7)*E(1)*(real(Y(7,1))*cos(y(6))+imag(Y(7,1))*sin(y(6)))-...
E(7)*E(2)*(real(Y(7,2))*cos(y(6)-y(1))+imag(Y(7,2))*sin(y(6)-y(1)))-...
E(7)*E(3)*(real(Y(7,3))*cos(y(6)-y(2))+imag(Y(7,3))*sin(y(6)-y(2)))-...
E(7)*E(4)*(real(Y(7,4))*cos(y(6)-y(3))+imag(Y(7,4))*sin(y(6)-y(3)))-...
E(7)*E(5)*(real(Y(7,5))*cos(y(6)-y(4))+imag(Y(7,5))*sin(y(6)-y(4)))-...
E(7)*E(6)*(real(Y(7,6))*cos(y(6)-y(5))+imag(Y(7,6))*sin(y(6)-y(5)))-...
E(7)*E(8)*(real(Y(7,8))*cos(y(6)-y(7))+imag(Y(7,8))*sin(y(6)-y(7)))-...
E(7)*E(9)*(real(Y(7,9))*cos(y(6)-y(8))+imag(Y(7,9))*sin(y(6)-y(8)))-...
E(7)*E(10)*(real(Y(7,10))*cos(y(6)-y(9))+imag(Y(7,10))*sin(y(6)-y(9))))+y(15)-k(6);
yp(16) = delta_t*(1/H(8,8))*(-D(8,8)*(y(16)+u(7))+P(8)-real(Y(8,8))*E(8)^2-...
E(8)*E(1)*(real(Y(8,1))*cos(y(7))+imag(Y(8,1))*sin(y(7)))-...
E(8)*E(2)*(real(Y(8,2))*cos(y(7)-y(1))+imag(Y(8,2))*sin(y(7)-y(1)))-...
E(8)*E(3)*(real(Y(8,3))*cos(y(7)-y(2))+imag(Y(8,3))*sin(y(7)-y(2)))-...
E(8)*E(4)*(real(Y(8,4))*cos(y(7)-y(3))+imag(Y(8,4))*sin(y(7)-y(3)))-...
E(8)*E(5)*(real(Y(8,5))*cos(y(7)-y(4))+imag(Y(8,5))*sin(y(7)-y(4)))-...
E(8)*E(6)*(real(Y(8,6))*cos(y(7)-y(5))+imag(Y(8,6))*sin(y(7)-y(5)))-...
E(8)*E(7)*(real(Y(8,7))*cos(y(7)-y(6))+imag(Y(8,7))*sin(y(7)-y(6)))-...
E(8)*E(9)*(real(Y(8,9))*cos(y(7)-y(8))+imag(Y(8,9))*sin(y(7)-y(8)))-...
E(8)*E(10)*(real(Y(8,10))*cos(y(7)-y(9))+imag(Y(8,10))*sin(y(7)-y(9))))+y(16)-k(7);
yp(17) = delta_t*(1/H(9,9))*(-D(9,9)*(y(17)+u(8))+P(9)-real(Y(9,9))*E(9)^2-...
E(9)*E(1)*(real(Y(9,1))*cos(y(8))+imag(Y(9,1))*sin(y(8)))-...
E(9)*E(2)*(real(Y(9,2))*cos(y(8)-y(1))+imag(Y(9,2))*sin(y(8)-y(1)))-...
E(9)*E(3)*(real(Y(9,3))*cos(y(8)-y(2))+imag(Y(9,3))*sin(y(8)-y(2)))-...
E(9)*E(4)*(real(Y(9,4))*cos(y(8)-y(3))+imag(Y(9,4))*sin(y(8)-y(3)))-...
E(9)*E(5)*(real(Y(9,5))*cos(y(8)-y(4))+imag(Y(9,5))*sin(y(8)-y(4)))-...
E(9)*E(6)*(real(Y(9,6))*cos(y(8)-y(5))+imag(Y(9,6))*sin(y(8)-y(5)))-...
E(9)*E(7)*(real(Y(9,7))*cos(y(8)-y(6))+imag(Y(9,7))*sin(y(8)-y(6)))-...
E(9)*E(8)*(real(Y(9,8))*cos(y(8)-y(7))+imag(Y(9,8))*sin(y(8)-y(7)))-...
E(9)*E(10)*(real(Y(9,10))*cos(y(8)-y(9))+imag(Y(9,10))*sin(y(8)-y(9))))+y(17)-k(8);
3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]程改红,徐政.电力系统故障恢复过程中的过电压控制[J].电网技术, 2004, 28(11):5.
[2]王成山,曹旌,陈光远.基于聚类分析的电力系统暂态稳定故障筛选[J].电网技术, 2005, 29(15):5.
[3]蔡晔,陈彦如,曹一家,等.基于加权网络结构熵的电网连锁故障研究[J].复杂系统与复杂性科学, 2013, 10(1):7.
4 Matlab代码、数据下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取