技术视界 | 探秘双足人形机器人腿部设计的核心与突破
双足人形机器人作为机器人技术领域的一个重要分支,不仅可以适配人类的生存环境,还可以承担许多危险或重复性工作任务。然而,其腿部设计的复杂性决定了运动性能的上限,同时也是当前技术进步的核心挑战之一。在此,结合行业研究报告,深入探讨双足人形机器人腿部设计的核心技术、创新趋势和未来发展方向。
一、腿部设计的重要性
双足机器人腿部设计直接影响机器人在动态环境中的运动能力和稳定性。其意义体现在:
适配复杂环境:双足机器人需要在楼梯、斜坡、不平整地面等复杂环境中保持稳定。
执行多样化任务:实现行走、蹲起、爬起、跨步等动作,满足工业、服务业甚至家政场景的需求。
平衡效率与能耗:优化腿部设计能显著降低机器人运行中的能耗,同时提升动态稳定性。
尽管现有机器人(如ASIMO、Optimus)已实现了较高水平的运动能力,但距离人类骨骼肌肉的灵活性仍有一定差距。优化腿部结构和驱动形式成为解决这一问题的关键。
二、腿部设计的核心原则
双足机器人的腿部设计应遵循以下几大核心原则:
-
高总质心:通过将机器人重心抬高,可减少行走中的横向摆动,从而提高在高速运动中的稳定性。特别是在复杂地形或转弯时,高总质心设计显得尤为重要。
-
低惯量与低质量:轻量化设计能够显著降低腿部惯量,有助于提升动态响应速度和运动稳定性。常用方法包括将重型部件(如电机、减速器)上移至大腿或躯干。
-
高刚性:刚性不足可能导致腿部在动态运动中的变形,影响步态的稳定性。高刚性设计能减少模型误差,提高动态行走性能。
-
高动态性能:包括快速响应能力、精确的动作执行及对外界环境的实时适应。动态性能直接影响机器人的多动作切换及其安全性。
三、常见腿部构型与创新设计
1. 人腿方案(6自由度)
大多数双足机器人采用基于人体解剖学的“人腿”方案,通常包括:
-
髋关节(3自由度):负责滚动、俯仰和偏摆。
-
膝关节(1自由度):主要完成俯仰动作。
-
踝关节(2自由度):负责足部滚动和俯仰。
此方案在灵活性和稳定性之间实现了较好的平衡,是目前的主流设计。
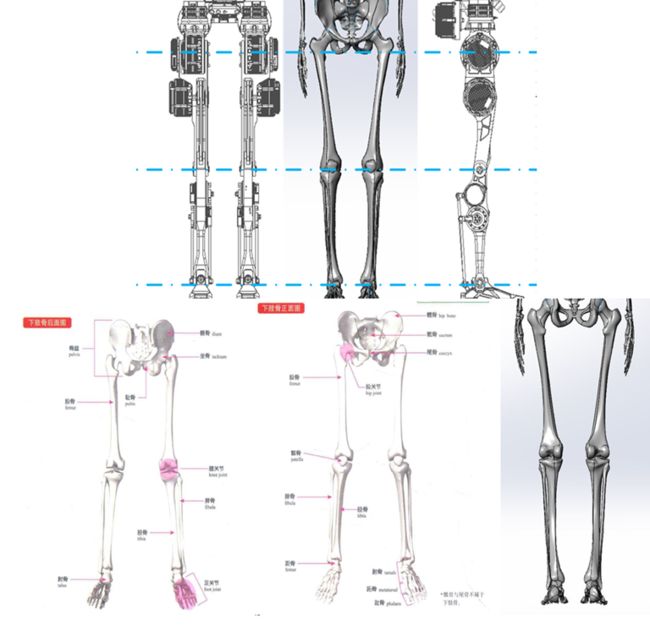 对标人体下肢骨骼
对标人体下肢骨骼
2. 鸟腿方案
鸟腿构型灵感来源于鸟类的反膝设计,如Cassie、Digit和远征A1机器人。这种构型的特点:
-
低能耗:通过纯机械方式实现步态切换,无需大量能量消耗。
-
高动态性能:减少关节数目,简化控制逻辑。
-
优异的适应性:特别适合复杂地形。
-
缺点:相较“人腿”设计,通用性略低。
四、腿部执行器与传动系统优化
1、执行器设计
传统旋转执行器正在被高性能的无框电机或直线驱动器替代。通过减小电机的重量并优化安装位置(如膝关节电机上移至大腿),能够降低惯量和腿部总质量。
2. 传动装置
不同机器人在传动方式上表现出显著差异:
ASIMO:通过四连杆机构将大腿电机的动力传递至膝关节,优化力矩传输。
Optimus和RH5:采用线性驱动器和滚柱丝杠设计,提升负载能力和运动精度。
3. 并联机构的优势
尤其在踝关节,并联机构广泛应用,具备以下优点:刚性提升:增强直立状态下的稳定性。减小惯量:将电机和减速器上移至大腿或小腿,降低腿部运动负担。
五、“青龙”案例举例分析
作为一款全尺寸通用人形机器人,青龙机器人在腿部设计上融合了先进的技术与设计理念,具有以下特点(青龙全尺寸通用人形机器人硬件开源内容):
-
高自由度与仿生构型:单腿具有6个自由度,模拟人腿的髋关节(俯仰、侧摆、周转)、膝关节(俯仰)和踝关节(俯仰、侧摆)。髋关节最大扭矩可达396 Nm,确保负载能力和动态表现。
-
轻量化与高强度材料:青龙的腿部结构采用高强度轻质材料,在减轻整体重量的同时保证了刚性和强度。
-
高动态响应与适应能力:具备快速行走(≥5km/h)、上下坡(20°)和跨越台阶(13cm)的能力。腿部的高动态响应性能使其能够适应复杂地形如碎石、沙土等。
-
先进的控制与传动系统:采用基于EtherCAT的高实时性控制总线,结合伺服控制器实现精确的关节力矩和位置控制。踝关节采用并联设计,进一步提升刚性并减少惯量。
-
丰富的感知与交互能力:配备深度相机与激光雷达,为腿部的运动规划和障碍物检测提供数据支持。可实现对复杂地形的自主导航和动态适应。
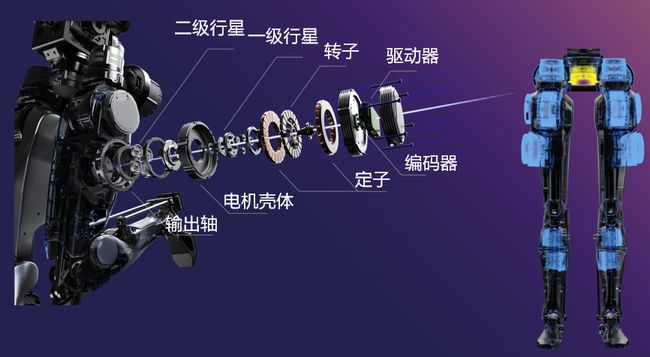 青龙机器人的下肢关节模组
青龙机器人的下肢关节模组
六、未来趋势与挑战
1. 轻量化与能效优化
未来机器人腿部设计将更加注重轻量化,如采用碳纤维材料及拓扑优化设计,从根本上减少能耗。
2. 多模式运动能力
除了行走,我们仍期待未来机器人将能够完成跑步、跳跃甚至攀爬等动作,这对腿部的灵活性和控制算法提出了更高要求。
3. 仿生与智能控制结合
通过借鉴生物学原理,结合先进的AI算法,机器人能够更好地适应动态环境并实时优化步态。
4. 更多的拓扑构型
机器人可以分析更多的拓扑空间结构,优化机器人的构型。
5. 拓展应用场景
双足机器人将在工业、服务业、救援等领域发挥更大的作用,如机器人青龙正积极探索更多高效作业场景。
OpenLoong开源社区介绍
“OpenLoong”是一个全球领先的综合性人形机器人开源社区。社区秉持着技术驱动和开放透明的价值观,致力于汇聚全球开发者,共同推动人形机器人产业的发展,为全球人形机器人产业赋能。
我们的使命是通过在机器人本体技术、平台软件、具身智能、具身数据集以及上层应用等多个方面做出重大贡献,从而推动整个产业的进步。
注册成为 OpenLoong 开源社区的一员,与机器人研究者和爱好者共同开启人形机器人探索之旅!
注册地址:OpenLoong