linux i2c驱动架构-dm368 i2c驱动分析
在阅读本文最好先熟悉一种i2c设备的驱动程序,并且浏览一下i2c-core.c以及芯片提供商的提供的i2c总线驱动(i2c-davinci.c)。标题党请见谅!
其实i2c接口非常的简单,即使用51单片的gpio来模拟i2c,编写一个e2prom或者其他i2c接口的驱动程序,也不是什么难事,几百行代码就能搞定。
但是Linux的i2c驱动体系结构却有相当的复杂度,不管是叫linux i2c驱动还是单片机i2c驱动,其根本还是操作soc芯片内部的i2c模块(也叫i2c adapter)(读写i2c相关的寄存器)来产生start、stop还有ack信号而已。
linux设备驱动到底复杂在什么地方?
假设soc芯片dm368有两个i2c adapter(368内部真正只有一个i2c模块):i2c_adapter1,i2c_adapter1;然后外部有三个i2c接口的设备i2c_device1,i2c_device2,i2c_device3。
现在要求在裸机下写出他们的驱动函数。那么肯定要写出6个不同的驱动函数:
i2c_adapter1_ReadWrite_i2c_device1(); i2c_adapter1_ReadWrite_i2c_device2() i2c_adapter1_ReadWrite_i2c_device3() i2c_adapter2_ReadWrite_i2c_device1() i2c_adapter2_ReadWrite_i2c_device2() i2c_adapter2_ReadWrite_i2c_device3()
如果采用adapter和device分离的思想来写这样的驱动会是怎样呢?
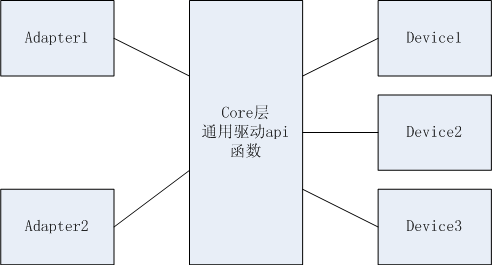
图1
这样分离之后,只需要m+n个驱动,而且Adapter和Device的几乎没有耦合性,增加一个Adapter或者device并不会影响其余的驱动。
这就是分离思想带来的好处。除此之外,linux虽然是C写的,但是大量使用了面向对象的变成方法(可以理解为分层的思想),仅仅分离细想和分层思想的引入,就大大增加了linux设备驱动的复杂度。
linux驱动中 i2c驱动架构
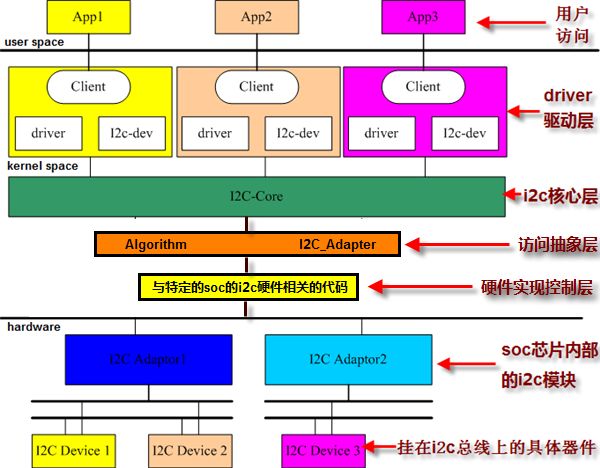
图2
上图完整的描述了linux i2c驱动架构,虽然I2C硬件体系结构比较简单,但是i2c体系结构在linux中的实现却相当复杂。那么我们如何编写特定i2c接口器件(比如,ov2715,需要i2c来配置寄存器)的驱动程序?就是说上述架构中的那些部分需要我们完成,而哪些是linux内核已经完善的或者是芯片提供商(TI davinci平台已经做好的)已经提供的?
架构层次分类
第一层:提供i2c adapter的硬件驱动,探测、初始化i2c adapter(如申请i2c的io地址和中断号),驱动soc控制的i2c adapter在硬件上产生信号(start、stop、ack)以及处理i2c中断。覆盖图中的硬件实现层
第二层:提供i2c adapter的algorithm,用具体适配器的xxx_xferf()函数来填充i2c_algorithm的master_xfer函数指针,并把赋值后的i2c_algorithm再赋值给i2c_adapter的algo指针。覆盖图中的访问抽象层、i2c核心层
第三层:实现i2c设备驱动中的i2c_driver接口,用具体的i2c device设备的attach_adapter()、detach_adapter()方法赋值给i2c_driver的成员函数指针。实现设备device与总线(或者叫adapter)的挂接。覆盖图中的driver驱动层
第四层:实现i2c设备所对应的具体device的驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则是千差万别的,eeprom和ov2715显然不是同一类的device,所以要实现具体设备device的write()、read()、ioctl()等方法,赋值给file_operations,然后注册字符设备(多数是字符设备)。覆盖图中的driver驱动层
第一层和第二层又叫i2c总线驱动(bus),第三第四属于i2c设备驱动(device driver)。在linux驱动架构中,几乎不需要驱动开发人员再添加bus,因为linux内核几乎集成所有总线bus,如usb、pci、i2c等等。并且总线bus中的【与特定硬件相关的代码】已由芯片提供商编写完成,例如TI davinci平台i2c总线bus与硬件相关的代码在内核目录/drivers/i2c/buses下的i2c-davinci.c源文件中;而三星的s3c-2440平台i2c总线bus为/drivers/i2c/buses/i2c-s3c2410.c
第三第四层又叫设备驱动层与特定device相干的就需要驱动工程师来实现了。
明确了方向后,再来具体分析。
具体分析
i2c_adapter与i2c_client的关系与i2c硬件体系中设配器与设备的关系一致,即i2c_client依附于i2c_adapter,由于一个适配器上可以连接多个i2c设备device,所以相应的,i2c_adapter也可以被多个i2c_client依附,在i2c_adapter中包含i2c_client的链表。同一类的i2c设备device对应一个驱动driver。driver与device的关系是一对多的关系。
现在,我们就来看一下这几个重要的结构体,分别是i2c_driver i2c_client i2c_adapter,也可以先忽略他们,待会回过头来看会更容易理解
1、i2c_driver
struct i2c_driver {
int id;
unsigned int class;
int (*attach_adapter)(struct i2c_adapter *);
int (*detach_adapter)(struct i2c_adapter *);
int (*detach_client)(struct i2c_client *);
int (*command)(struct i2c_client *client,unsigned int cmd, void *arg);
struct device_driver driver;
struct list_head list;
};
2、i2c_client
struct i2c_client {
unsigned int flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
int usage_count; /* How many accesses currently */
/* to the client */
struct device dev; /* the device structure */
struct list_head list;
char name[I2C_NAME_SIZE];
struct completion released;
};
3、i2c_adapter
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class;
struct i2c_algorithm *algo;/* the algorithm to access the bus */
void *algo_data;
/* --- administration stuff. */
int (*client_register)(struct i2c_client *);
int (*client_unregister)(struct i2c_client *);
/* data fields that are valid for all devices */
struct mutex bus_lock;
struct mutex clist_lock;
int timeout;
int retries;
struct device dev; /* the adapter device */
struct class_device class_dev; /* the class device */
int nr;
struct list_head clients;
struct list_head list;
char name[I2C_NAME_SIZE];
struct completion dev_released;
struct completion class_dev_released;
};
4、i2c_algorithm
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs,
int num);
int (*slave_send)(struct i2c_adapter *,char*,int);
int (*slave_recv)(struct i2c_adapter *,char*,int);
u32 (*functionality) (struct i2c_adapter *);
};
i2c_adapter对应与物理上的一个适配器,而i2c_algorithm对应一套通信方法,一个i2c适配器需要i2c_algorithm中提供的(i2c_algorithm中的又是更下层与硬件相关的代码提供)通信函数来控制适配器上产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做不了,因此i2c_adapter中包含其使用i2c_algorithm的指针。
i2c_algorithm中的关键函数master_xfer()用于产生i2c访问周期需要的start stop ack信号,以i2c_msg(即i2c消息)为单位发送和接收通信数据。i2c_msg也非常关键,调用驱动中的发送接收函数需要填充该结构体
/*
* I2C Message - used for pure i2c transaction, also from /dev interface
*/
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
i2c_driver对应一套驱动方法,其主要函数是attach_adapter()和detach_client(),i2c_client对应真实的i2c物理设备device,每个i2c设备都需要一个i2c_client来描述,i2c_driver与i2c_client的关系是一对多。一个i2c_driver上可以支持多个同等类型的i2c_client.
【i2c_adapter和i2c_client】
i2c_adapter和i2c_client的关系与i2c硬件体系中适配器和设备的关系一致,即i2c_client依附于i2c_adapter,由于一个适配器上可以连接多个i2c设备,所以i2c_adapter中包含依附于它的i2c_client的链表。
从图1图2中都可以看出,linux内核对i2c架构抽象了一个叫核心层core的中间件,它分离了设备驱动device driver和硬件控制的实现细节(如操作i2c的寄存器),core层不但为上面的设备驱动提供封装后的内核注册函数,而且还为小面的硬件时间提供注册接口(也就是i2c总线注册接口),可以说core层起到了承上启下的作用。
我们先看一下i2c-core为外部提供的核心函数(选取部分),i2c-core对应的源文件为i2c-core.c,位于内核目录/driver/i2c/i2c-core.c
EXPORT_SYMBOL(i2c_add_adapter); EXPORT_SYMBOL(i2c_del_adapter); EXPORT_SYMBOL(i2c_del_driver); EXPORT_SYMBOL(i2c_attach_client); EXPORT_SYMBOL(i2c_detach_client); EXPORT_SYMBOL(i2c_transfer);
i2c_transfer()函数,i2c_transfer()函数本身并不具备驱动适配器物理硬件完成消息交互的能力,它只是寻找到i2c_adapter对应的i2c_algorithm,并使用i2c_algorithm的master_xfer()函数真正的驱动硬件流程,代码清单如下,不重要的已删除。
int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num)
{
int ret;
if (adap->algo->master_xfer) {//如果master_xfer函数存在,则调用,否则返回错误
ret = adap->algo->master_xfer(adap,msgs,num);//这个函数在硬件相关的代码中给algorithm赋值
return ret;
} else {
return -ENOSYS;
}
}
int i2c_attach_client(struct i2c_client *client)
{
...
device_register(&client->dev);
device_create_file(&client->dev, &dev_attr_client_name);
...
return 0;
}
int i2c_detach_client(struct i2c_client *client)
{
...
device_remove_file(&client->dev, &dev_attr_client_name);
device_unregister(&client->dev);
...
return res;
}
/* -----
* i2c_add_adapter is called from within the algorithm layer,
* when a new hw adapter registers. A new device is register to be
* available for clients.
*/
int i2c_add_adapter(struct i2c_adapter *adap)
{
...
device_register(&adap->dev);
device_create_file(&adap->dev, &dev_attr_name);
...
/* inform drivers of new adapters */
list_for_each(item,&drivers) {
driver = list_entry(item, struct i2c_driver, list);
if (driver->attach_adapter)
/* We ignore the return code; if it fails, too bad */
driver->attach_adapter(adap);
}
...
}
int i2c_del_adapter(struct i2c_adapter *adap)
{
...
list_for_each(item,&drivers) {
driver = list_entry(item, struct i2c_driver, list);
if (driver->detach_adapter)
if ((res = driver->detach_adapter(adap))) {
}
}
...
list_for_each_safe(item, _n, &adap->clients) {
client = list_entry(item, struct i2c_client, list);
if ((res=client->driver->detach_client(client))) {
}
}
...
device_remove_file(&adap->dev, &dev_attr_name);
device_unregister(&adap->dev);
}
static struct platform_driver davinci_i2c_driver = {
.probe = davinci_i2c_probe,
.remove = davinci_i2c_remove,
.driver = {
.name = "i2c_davinci",
.owner = THIS_MODULE,
},
};
/* I2C may be needed to bring up other drivers */
static int __init davinci_i2c_init_driver(void)
{
return platform_driver_register(&davinci_i2c_driver);
}
subsys_initcall(davinci_i2c_init_driver);
static void __exit davinci_i2c_exit_driver(void)
{
platform_driver_unregister(&davinci_i2c_driver);
}
module_exit(davinci_i2c_exit_driver);
static struct i2c_algorithm i2c_davinci_algo = {
.master_xfer = i2c_davinci_xfer,
.functionality = i2c_davinci_func,
};
adap->algo = &i2c_davinci_algo;
梳理图
有时候代码比任何文字描述都来得直接,但是过多的代码展示反而让人觉得枯燥。这个时候,需要一幅图来梳理一下上面的内容,请看图3。
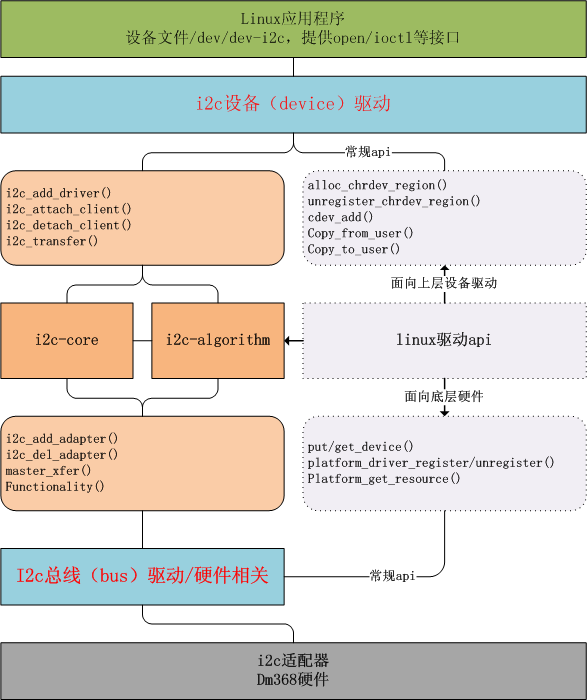
图3
好了,上面这些代码的展示是告诉我们,linux内核和芯片提供商为我们的的驱动程序提供了 i2c驱动的框架,以及框架底层与硬件相关的代码的实现。剩下的就是针对挂载在i2c两线上的i2c设备了device,如at24c02,例如ov2715,而编写的具体设备驱动了,这里的设备就是硬件接口外挂载的设备,而非硬件接口本身(soc硬件接口本身的驱动可以理解为总线驱动)。
在理解了i2c驱动架构后,我们接下来再作两方面的分析工作:一是具体的i2c设备ov2715驱动源码分析,二是davinci平台的i2c总线驱动源码。
ov2715设备i2c驱动源码分析
ov2715为200万的CMOS Sensor,芯片的寄存器控制通过i2c接口完成,i2c设备地址为0x6c,寄存器地址为16位两个字节,寄存器值为8位一个字节,可以理解为一般的字符设备。
该驱动程序并非只能用于ov2715,因此源码中存在支持多个设备地址的机制。
该字符设备的用到的结构体有两个,如下
typedef struct {
int devAddr;
struct i2c_client client; //!< Data structure containing general access routines.
struct i2c_driver driver; //!< Data structure containing information specific to each client.
char name[20];
int nameSize;
int users;
} I2C_Obj;
#define I2C_DEV_MAX_ADDR (0xFF)
#define I2C_TRANSFER_BUF_SIZE_MAX (256)
typedef struct {
struct cdev cdev; /* Char device structure */
int major;
struct semaphore semLock;
I2C_Obj *pObj[I2C_DEV_MAX_ADDR];
uint8_t reg[I2C_TRANSFER_BUF_SIZE_MAX];
uint16_t reg16[I2C_TRANSFER_BUF_SIZE_MAX];
uint8_t buffer[I2C_TRANSFER_BUF_SIZE_MAX*4];
} I2C_Dev;
一个I2C_Obj描述一个设备,devAddr保存该设备的地址,I2C_Obj内嵌到结构体I2C_Dev,I2C_Dev管理该驱动所支持的所有设备,尽管支持多个设备,但i2c适配器只有一个,因此需要一个信号量semLock来保护该共享资源,同时只能向一个设备读写数据。成员变量cdev是我们所熟知的,每个字符设备驱动中几乎总会有一个结构体包含它,major用于保存该驱动的主设备编号,reg数组为寄存器地址为8位的寄存器地址缓冲区,reg16为寄存器地址为16的寄存器地址缓冲区。同时可以读写多个寄存器地址的值。buffer为读写的寄存器值
下面先从字符设备的基本框架入手,然后深入该驱动的细节部分。
首先是该字符设备的初始化和退出函数
int I2C_devInit(void)
{
int result, i;
dev_t dev = 0;
result = alloc_chrdev_region(&dev, 0, 1, I2C_DRV_NAME);//分配字符设备空间
for(i=0; i<I2C_DEV_MAX_ADDR; i++)
{
gI2C_dev.pObj[i]=NULL;
}
gI2C_dev.major = MAJOR(dev);//保存设备主编号
sema_init(&gI2C_dev.semLock, 1);//信号量初始化
cdev_init(&gI2C_dev.cdev, &gI2C_devFileOps);//使用gI2C_devFileOps初始化该字符设备,gI2C_devFileOps见下文
gI2C_dev.cdev.owner = THIS_MODULE;//常规赋值
gI2C_dev.cdev.ops = &gI2C_devFileOps;//常规赋值 result = cdev_add(&gI2C_dev.cdev, dev, 1);//添加设备到字符设备中 return result;}void I2C_devExit(void){ dev_t devno = MKDEV(gI2C_dev.major, 0); cdev_del(&gI2C_dev.cdev);//从字符设备中删除该设备 unregister_chrdev_region(devno, 1);//回收空间}
gI2c_devFileOps全局变量,驱动初始化会用到该结构体变量
struct file_operations gI2C_devFileOps = {
.owner = THIS_MODULE,
.open = I2C_devOpen,
.release = I2C_devRelease,
.ioctl = I2C_devIoctl,
};
在I2C_devOpen和I2C_devOpen中并没有做实际的工作,重要的工作均在I2C_devIoctl这个ioctl中完成。I2C_devIoctl代码展示(将影响结构条理的代码去掉,稍后在做详细分析)
int I2C_devIoctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg)
{
I2C_Obj *pObj;
int status=0;
I2C_TransferPrm transferPrm;
pObj = (I2C_Obj *)filp->private_data;
if(!I2C_IOCTL_CMD_IS_VALID(cmd))
return -1;
cmd = I2C_IOCTL_CMD_GET(cmd);//cmd命令转换,防止混淆,具体原因参见上一篇文章:ioctl中的cmd
down_interruptible(&gI2C_dev.semLock); //信号量down
switch(cmd)
{
case I2C_CMD_SET_DEV_ADDR://命令1,设置设备地址
filp->private_data = I2C_create(arg);
case I2C_CMD_WRITE: //命令2,写寄存器值
status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
...
break;
case I2C_CMD_READ: //命令3,读寄存器值
status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
...
break;
default:
status = -1;
break;
}
up(&gI2C_dev.semLock); //信号量up
return status;
}
void *I2C_create(int devAddr) {
int ret;
struct i2c_driver *driver;
struct i2c_client *client = client;
I2C_Obj *pObj;
devAddr >>= 1;
if(devAddr>I2C_DEV_MAX_ADDR) //变量合法性判断
return NULL;
if(gI2C_dev.pObj[devAddr]!=NULL) { //变量合法性判断,如果该地址的设备已经创建,则调过,防止上层错误调用
// already allocated, increment user count, and return the allocated handle
gI2C_dev.pObj[devAddr]->users++;
return gI2C_dev.pObj[devAddr];
}
pObj = (void*)kmalloc( sizeof(I2C_Obj), GFP_KERNEL); //为pObj分配空间
gI2C_dev.pObj[devAddr] = pObj; //将分配的空间地址保存在全局变量里
memset(pObj, 0, sizeof(I2C_Obj));
pObj->client.adapter = NULL;
pObj->users++; //用户基数,初始化为0,当前设为1
pObj->devAddr = devAddr; //保存设备地址
gI2C_curAddr = pObj->devAddr; //gI2C_curAddr为全局的整型变量,用于保存当前的设备地址
driver = &pObj->driver; //将成员变量driver单独抽取出来,因为线面要使用driver来初始化驱动
pObj->nameSize=0;//i2c设备名称,注意,这里不是在/dev下面的设备节点名
pObj->name[pObj->nameSize++] = 'I';
pObj->name[pObj->nameSize++] = '2';
pObj->name[pObj->nameSize++] = 'C';
pObj->name[pObj->nameSize++] = '_';
pObj->name[pObj->nameSize++] = 'A' + ((pObj->devAddr >> 0) & 0xF);
pObj->name[pObj->nameSize++] = 'B' + ((pObj->devAddr >> 4) & 0xF);
pObj->name[pObj->nameSize++] = 0;
driver->driver.name = pObj->name; //保存刚才设置的name
driver->id = I2C_DRIVERID_MISC;
driver->attach_adapter = I2C_attachAdapter; //这个很重要,将驱动连接到i2c适配器上,在后面分析
driver->detach_client = I2C_detachClient; //这个很重,在后面分析
if((ret = i2c_add_driver(driver))) //使用i2c-core(i2c_register_driver函数)的接口,注册该驱动,i2c_add_driver实质调用了driver_register()
{
printk( KERN_ERR "I2C: ERROR: Driver registration failed (address=%x), module not inserted.\n", pObj->devAddr);
}
if(ret<0) {
gI2C_dev.pObj[pObj->devAddr] = NULL;
kfree(pObj);
return NULL;
}
return pObj;
}
其他两个命令是I2C_CMD_WRITE和I2C_CMD_READ,这个比较简单,只需设置寄存器地址的大小以及寄存器值的大小,然后通过i2c-core 提供的i2c_transfer()函数发送即可。例如I2C_wirte()
int I2C_write(I2C_Obj *pObj, uint8_t *reg, uint8_t *buffer, uint8_t count, uint8_t dataSize)
{
uint8_t i;
int err;
struct i2c_client *client;
struct i2c_msg msg[1];
unsigned char data[8];
if(pObj==NULL)
return -ENODEV;
client = &pObj->client;//得到client信息
if(!client->adapter)
return -ENODEV;
if(dataSize<=0||dataSize>4)
return -1;
for(i=0; i<count; i++) {
msg->addr = client->addr;//设置要写的i2c设备地址
msg->flags= 0;//一直为0
msg->buf = data;//date为准备i2c通信的缓冲区,这个缓冲区除了不包含设备地址外,要包括要目标寄存器地址,和要写入该寄存器的值
data[0] = reg[i];//寄存器地址赋值
if(dataSize==1) {//寄存器值长度为1
data[1] = buffer[i];//寄存器值赋值
msg->len = 2; //设置data长度为2
} else if(dataSize==2) {//寄存器值长度为2
data[1] = buffer[2*i+1];
data[2] = buffer[2*i];
msg->len = 3;
}
err = i2c_transfer(client->adapter, msg, 1);//调用i2c-core中的i2c_transfer发送i2c数据
if( err < 0 )
return err;
}
return 0;
}
现在,我们重点分析上一段代码void *I2C_create(int devAddr)函数中的i2c_driver结构体部分的代码,下面的代码是从上面I2C_create抽取出来的
driver->driver.name = pObj->name;
driver->id = I2C_DRIVERID_MISC;
driver->attach_adapter = I2C_attachAdapter;
driver->detach_client = I2C_detachClient;
/* Notifies the driver that a new bus has appeared. This routine * can be used by the driver to test if the bus meets its conditions * & seek for the presence of the chip(s) it supports. If found, it * registers the client(s) that are on the bus to the i2c admin. via * i2c_attach_client. */
int I2C_attachAdapter(struct i2c_adapter *adapter)
{
return I2C_detectClient(adapter, gI2C_curAddr);
}
int I2C_detectClient(struct i2c_adapter *adapter, int address)
{
I2C_Obj *pObj;
struct i2c_client *client;
int err = 0;
if(address > I2C_DEV_MAX_ADDR) {
printk( KERN_ERR "I2C: ERROR: Invalid device address %x\n", address);
return -1;
}
pObj = gI2C_dev.pObj[address];
if(pObj==NULL) {
printk( KERN_ERR "I2C: ERROR: Object not found for address %x\n", address);
return -1;
}
client = &pObj->client;
if(client->adapter)
return -EBUSY; /* our client is already attached */
memset(client, 0x00, sizeof(struct i2c_client));
client->addr = pObj->devAddr;
client->adapter = adapter;
client->driver = &pObj->driver;
if((err = i2c_attach_client(client)))
{
printk( KERN_ERR "I2C: ERROR: Couldn't attach %s (address=%x)\n", pObj->name, pObj->devAddr);
client->adapter = NULL;
return err;
}
return 0;
}
当内核驱动准备删除该驱动时会自动调用i2c_driver的成员函数:detech_client,因此我们需要实现删除client设备的函数然后赋值给改函数指针,detech_client的说明如下:
/* tells the driver that a client is about to be deleted & gives it * the chance to remove its private data. Also, if the client struct * has been dynamically allocated by the driver in the function above, * it must be freed here. */
int I2C_detachClient(struct i2c_client *client)
{
int err;
if(!client->adapter)
return -ENODEV; /* our client isn't attached */
if((err = i2c_detach_client(client))) {
printk( KERN_ERR "Client deregistration failed (address=%x), client not detached.\n", client->addr);
return err;
}
client->adapter = NULL;
return 0;
}
ov2715设备的i2c驱动源码的分析就到这里,至于平台相关的i2c总线驱动分析就放到下一篇文章里分析,因为这部分多数情况下并不需要我们亲自去实现。但是对于理解i2c驱动架构来说,还是有很大帮助的。