A*寻路算法的实现
原理:http://www.cppblog.com/christanxw/archive/2006/04/07/5126.html
算法理论请到原理这个传送门,代码中的注释,已经比较详细,所以我不会讲太多的原理,该文章本身就是以A*的思路,对算法进行一次速度上的优化,用一些更效率的方式来代替算法原理中必要的步骤。
针对算法原理,做出如下改动:
抛弃关闭列表,取而代之的是根据地图数据生成一个BYTE类型的二维数组,因为该数组在算法中可能需要修改,所以不能直接使用原始数据。
注:二维数组动态分配应为:
BYTE **pMap = new BYTE*[地图高度];
for(int i = 0; i < 地图高度; i++)
pMap[i] = new BYTE[地图宽度];
释放:
void FreeMap(BYTE **pMap, DWORD dwHeight)
{
for(DWORD i = 0; i < dwHeight; i++)
{
delete pMap[i];
pMap[i] = NULL;
}
delete [] pMap;
}
抛弃曼哈顿算法,使用求绝对距离的方法直接计算F,使用相邻格坐标,其中(x,y)任意相等则为横纵移动判断G
在遍历开启列表查找最小距离的节点时,加入跳出逻辑。
修改后的缺点,占内存,10000*10000要算上列表要100+M,所以如果你的游戏有这么大的地图,应该分段查找,分成1000*1000一次比较理想,或者对地图数据进行压缩。
测试结果:
[3300] 出口坐标:354, B8 当前坐标:CE, 1FD
[3300] 最终寻路到:353, CC
[3300] 耗时:0 毫秒
[3300] 寻路成功,节点数:1187
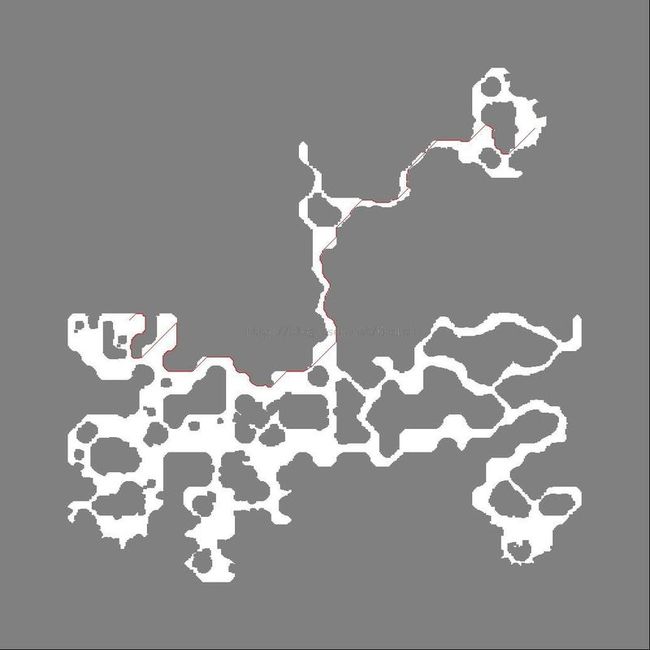
根据图片看到的情况,很显然,这不是最佳路径,要选择最佳路径,我自己能想到的办法就是还是先得到这个路径,然后在这个路径中查找角度改变的地方,满足一个三角之后,或者根据距离分段,根据根据两端的坐标再进行一次A*,这样数次之后可能得到的路径也不错了。
对于优化路线最简单的办法,请到这个传送门:对A*算法的路径进行优化
代码如下:
必须依赖的VC++头文件(vc6.0)有:
#include <list>
#include <algorithm>
#include <stdarg.h>
#include <math.h>
大概就是这些,不够再百度下吧
头文件
namespace blx
{
#ifndef BREAK_GAP
#define BREAK_GAP 20.0
#endif
#ifndef NOTLESS_COUNT
#define NOTLESS_COUNT 14
#endif
typedef struct _APOINT{
int x;
int y;
double dbGap;
_APOINT *parent;
}APOINT, *LPAPOINT;
class CAStar
{
public:
CAStar();
CAStar(BYTE **pMap, DWORD dwMapWidth, DWORD dwMapHeight);
bool Search(int X, int Y, std::list<POINT> &lResult);//主搜索
void SetDestinationPos(int X, int Y)//设置目标坐标
{m_dwDestinationX = X; m_dwDestinationY = Y;}
void SetMapAttributes(BYTE **pMap, DWORD dwWidth, DWORD dwHeight)//设置地图属性 参数为:指针,宽,高 与第二个构造函数相同
{m_pMap = pMap; m_dwMapWidth = dwWidth; m_dwMapHeight = dwHeight;};
void printBitmap(BYTE **pMap, int nWidth, int nHeight, std::list<POINT> &lPath, LPCTSTR lpFile);//该接口可将寻路结果保存为bmp图像
//参数为 地图指针,宽度,高度,寻路路径,文件
//不要使用m_pMap,应该在搜索完毕后新建一个地图,然后再来调用该接口生成图像
private:
LPAPOINT GenerateSuccessors(std::list<LPAPOINT>::iterator it);//处理每一个节点
std::list<LPAPOINT>::iterator GetMingapNode();//获取开启列表中最小距离的节点
private:
BYTE **m_pMap;
DWORD m_dwDestinationX, m_dwDestinationY, m_dwMapWidth, m_dwMapHeight;
std::list<LPAPOINT> m_lOpen;
std::list<LPAPOINT> m_lSafe;
};
}
源文件
namespace blx
{
CAStar::CAStar()
{
m_pMap = NULL;
m_dwDestinationX = 0;
m_dwDestinationY = 0;
m_dwMapWidth = 0xFFFFFFFF;
m_dwMapHeight = 0xFFFFFFFF;
}
CAStar::CAStar(BYTE **pMap, DWORD dwMapWidth, DWORD dwMapHeight)
{
m_pMap = pMap;
m_dwMapWidth = dwMapWidth;
m_dwMapHeight = dwMapHeight;
}
std::list<LPAPOINT>::iterator CAStar::GetMingapNode()
{
//获取开启列表中,距离目的地最近的节点
std::list<LPAPOINT>::iterator itResult;
double dbMinGap = 100000000.0;
int nIntoMaxCount = 0;
bool bIntoState = true;
for(std::list<LPAPOINT>::iterator it = m_lOpen.begin(); it != m_lOpen.end(); ++it)
{
if((*it)->dbGap < dbMinGap)
{
//这种类似冒泡排序的逻辑不用我多说吧
dbMinGap = (*it)->dbGap;
itResult = it;
//如果选中一个最小的,把检查循环状态设置为关闭
bIntoState = false;
}
else
{
if(bIntoState)//如果检查循环状态为开启
nIntoMaxCount++;//则计数+1
else
{
//如果检查循环状态为关闭
nIntoMaxCount = 1;//置计数为1
bIntoState = true;//把检查循环状态打开
}
}
//当检查循环计数大于 NOTLESS_COUNT 时 跳出
if(nIntoMaxCount > NOTLESS_COUNT) // #define NOTLESS_INDEX 14
{
//除了起始点之外,每次处理之后加入到开启列表的节点不会大于5(它本身已经关闭,它的父节点之前就关闭了)
//你可以在纸上画出来,走一步之后,当前格子相邻的8个格子中,有一个是父节点,有两个与他的父节点相邻
//我用了14来判断跳出,当然这个14是列表中的节点一直大于或等于已经搜索到的最小节点之后的第14次循环之后
//这样就可以把查找开启列表的成本降低到最小,但是路径很可能就不是最好的,因为不知道经过这14次之后,还会不会有更好的节点
//要满足这个前提,你要反向的遍历开启列表,本例中的开启列表是向前插入的(push_front),所以我是从链表的正向遍历
break;
}
}
return itResult;
}
struct _find_map_note{
_find_map_note(int x, int y) : _x(x), _y(y) {}
bool operator()(LPAPOINT p){return (p->x == _x && p->y == _y);}
int _x, _y;
};
LPAPOINT CAStar::GenerateSuccessors(std::list<LPAPOINT>::iterator it)
{
int x = (*it)->x, y = (*it)->y;
int aX[3] = {x - 1, x, x + 1};
int aY[3] = {y - 1, y, y + 1};
LPAPOINT pNow = *it;
m_lOpen.erase(it);//从开启列表中移除
m_pMap[y][x] = 0;//设置为关闭
//
BYTE bState = 0;
LPAPOINT p;
std::list<LPAPOINT>::iterator it2;
for(int i = 0; i < 3; i++)
{
for(int j = 0; j < 3; j++)
{
//交叉遍历
if(aX[j] >= m_dwMapWidth || aY[i] >= m_dwMapHeight)
continue;
bState = m_pMap[aY[i]][aX[j]];
if(!bState)
continue;//如果这个坐标是障碍或者已经置为关闭,则忽略它
else if(bState == 1)
{
//如果它不在开启列表,将它加入到开启列表中,并设置它的父节点为当前节点
p = new APOINT;
p->x = aX[j];
p->y = aY[i];
p->dbGap = _p2g(aX[j], aY[i], m_dwDestinationX, m_dwDestinationY);
p->parent = pNow;
m_lOpen.push_front(p);//反向加入到容器头部
m_lSafe.push_back(p);//加入到公共容器
m_pMap[aY[i]][aX[j]] = 2;
}
else if(bState == 2)
{
//如果它已经在开启列表中
if(x == aX[j] || y == aY[i])//判断它与当前节点的关系是否为横纵移动
{
//如果是
it2 = std::find_if(m_lOpen.begin(), m_lOpen.end(), _find_map_note(aX[j], aY[i]));//从开启列表中把它的指针拿出来
//因为开启列表是反向的,所以正向遍历能尽可能的减少开销,如果还要比这个更效率的,可能二叉堆会快一点
if((*it2)->parent->x != aX[j] && (*it2)->parent->y != aY[i])//判断它与它之前父节点的关系,是否是横纵移动
(*it2)->parent = pNow;//如果不是,则设置它的父节点为当前节点
}
//更形象的说,这是一个很成功的阴谋:
//当你与他的关系好到可以让他认贼作父时
//你调查一下他和他爹的关系如何
//如果他跟他爹的关系不好
//那你就对他说:“和你爹断绝关系吧,从此以后你就是我儿子!”
//如果他跟他爹的关系跟你一样好,那你就最好打消上面一句话这种不实际的念头。
//如果你不管你们之间的关系,就想要考虑让他认贼作父,那你就有可能付出了调查他的代价,最后却什么都得不到
//最后只能怨天尤人的说:“草,这票白干了!”
}
}
}
return NULL;
}
bool CAStar::Search(int X, int Y, std::list<POINT> &lResult)
{
if(X < 0 || Y < 0
|| X > m_dwMapWidth || Y > m_dwMapWidth ||
m_dwDestinationX < 0 || m_dwDestinationX < 0 ||
m_dwDestinationX > m_dwMapWidth || m_dwDestinationY > m_dwMapHeight)
{
_outf("坐标或地图参数错误!");
return false;
}
LPAPOINT p = new APOINT;
p->x = X;
p->y = Y;
p->parent = NULL;
p->dbGap = _p2g(X, Y, m_dwDestinationX, m_dwDestinationY);
m_lOpen.push_front(p);//起始节点加入到开启列表
m_lSafe.push_back(p);//加入到公共容器,任何新分配的节点,都要加入到这里,便于算法执行完后清理
std::list<LPAPOINT>::iterator it;
DWORD dwTime = clock();
while(!m_lOpen.empty())
{
//这里就是反复遍历开启列表选择距离最小的节点
it = GetMingapNode();
if((*it)->dbGap < BREAK_GAP)//#define BREAK_GAP 20.0在头文件中,我对寻路的要求不是很高,所以用了与目的地小于20则跳出
break;
p = *it;
GenerateSuccessors(it);
}
if(!m_lOpen.empty())
{
//如果列表不为空,从最后一个节点开始拷贝路径到返回值中
_outf("最终寻路到:%X, %X", p->x, p->y);
POINT point;
while(p)
{
point.x = p->x;
point.y = p->y;
lResult.push_front(point);
p = p->parent;
}
}
for(it = m_lSafe.begin(); it != m_lSafe.end(); ++it)
{
//清理内存
if(*it != NULL)
{
delete (*it);
*it = NULL;
}
}
m_lSafe.clear();//清空容器
_outf("耗时:%d 毫秒", clock() - dwTime);
if(m_lOpen.empty())
{
_outf("寻路失败");
return false;
}
m_lOpen.clear();//清空开启列表
_outf("寻路成功,节点数:%d", lResult.size());
return true;
}
void CAStar::printBitmap(BYTE **pMap, int nWidth, int nHeight, std::list<POINT> &lPath, LPCTSTR lpFile)
{
int _nWidth = (nWidth + 3) * 4 / 4;
HDC hdc = CreateCompatibleDC(NULL);
PVOID pBits = NULL;
BITMAPINFO bi;
bi.bmiHeader.biSize = sizeof(BITMAPINFOHEADER);
bi.bmiHeader.biWidth = nWidth;
bi.bmiHeader.biHeight = nHeight;
bi.bmiHeader.biPlanes = 1;
bi.bmiHeader.biBitCount = 24;
bi.bmiHeader.biCompression = BI_RGB;
bi.bmiHeader.biSizeImage = nWidth * nHeight * 3;
HBITMAP hBitmap = CreateDIBSection(NULL, &bi, DIB_RGB_COLORS, &pBits, NULL, NULL);
HBITMAP hOld = (HBITMAP)SelectObject(hdc, hBitmap);
for(int i = 0; i < nHeight - 1; i++)
{
for(int j = 0; j < nWidth - 1; j++)
{
if(pMap[i][j] == 1)
{
SetPixel(hdc, j, i, RGB(0xFF,0xFF,0xFF));
}
else
{
SetPixel(hdc, j, i, RGB(0x80,0x80,0x80));
}
}
}
for(std::list<POINT>::iterator it = lPath.begin(); it != lPath.end(); ++it)
SetPixel(hdc, it->x, it->y, RGB(0xFF,0,0));
SaveHBITMAP2File(NULL, lpFile, hBitmap, hdc);
SelectObject(hdc, hOld);
DeleteObject(hBitmap);
DeleteDC(hdc);
}
}
必须的函数
//调试输出
void _outf(const char *format, ...)
{
va_list al;
char buf[BLX_MAXSIZE];
va_start(al, format);
_vsnprintf(buf, BLX_MAXSIZE, format, al);
va_end(al);
OutputDebugStringA(buf);
}
//距离比价函数,计算两个坐标的绝对距离
double _p2g(int x1, int y1, int x2, int y2)
{
return sqrt(pow(double(abs(x1 - x2)), 2) + pow(double(abs(y1 - y2)), 2));
}
//这个是度娘上抄来的,反正可用,就没管,就是用来保存为bmp用的
PBITMAPINFO CreateBitmapInfoStruct(HWND hwnd, HBITMAP hBmp)
{
BITMAP bmp;
PBITMAPINFO pbmi;
WORD cClrBits;
if (!GetObject(hBmp, sizeof(BITMAP), (LPSTR)&bmp))
return NULL;
cClrBits = (WORD)(bmp.bmPlanes * bmp.bmBitsPixel);
if (cClrBits == 1)
cClrBits = 1;
else if (cClrBits <= 4)
cClrBits = 4;
else if (cClrBits <= 8)
cClrBits = 8;
else if (cClrBits <= 16)
cClrBits = 16;
else if (cClrBits <= 24)
cClrBits = 24;
else cClrBits = 32;
if (cClrBits != 24)
pbmi = (PBITMAPINFO) LocalAlloc(LPTR,
sizeof(BITMAPINFOHEADER) +
sizeof(RGBQUAD) * (1<< cClrBits));
else
pbmi = (PBITMAPINFO) LocalAlloc(LPTR,
sizeof(BITMAPINFOHEADER));
pbmi->bmiHeader.biSize = sizeof(BITMAPINFOHEADER);
pbmi->bmiHeader.biWidth = bmp.bmWidth;
pbmi->bmiHeader.biHeight = bmp.bmHeight;
pbmi->bmiHeader.biPlanes = bmp.bmPlanes;
pbmi->bmiHeader.biBitCount = bmp.bmBitsPixel;
if (cClrBits < 24)
pbmi->bmiHeader.biClrUsed = (1<<cClrBits);
pbmi->bmiHeader.biCompression = BI_RGB;
pbmi->bmiHeader.biSizeImage = ((pbmi->bmiHeader.biWidth * cClrBits +31) & ~31) /8
* pbmi->bmiHeader.biHeight;
pbmi->bmiHeader.biClrImportant = 0;
return pbmi;
}
//这个是度娘上抄来的,反正可用,就没管,就是用来保存为bmp用的
BOOL SaveHBITMAP2File(HWND hwnd, LPCTSTR pszFile, HBITMAP hBMP, HDC hDC)
{
PBITMAPINFO pbi = CreateBitmapInfoStruct(hwnd, hBMP);
HANDLE hf; // file handle
BITMAPFILEHEADER hdr; // bitmap file-header
PBITMAPINFOHEADER pbih; // bitmap info-header
LPBYTE lpBits; // memory pointer
DWORD dwTotal; // total count of bytes
DWORD cb; // incremental count of bytes
BYTE *hp; // byte pointer
DWORD dwTmp;
DWORD fileSizeInfo=0;
pbih = (PBITMAPINFOHEADER) pbi;
lpBits = (LPBYTE) GlobalAlloc(GMEM_FIXED, pbih->biSizeImage);
if (!lpBits)
return FALSE;
if (!GetDIBits(hDC, hBMP, 0, (WORD) pbih->biHeight, lpBits, pbi,
DIB_RGB_COLORS))
{
return FALSE;
}
fileSizeInfo = (DWORD) (sizeof(BITMAPFILEHEADER) +
pbih->biSize + pbih->biClrUsed
* sizeof(RGBQUAD) + pbih->biSizeImage);
if(fileSizeInfo==58)
return FALSE;
hf = CreateFile(pszFile,
GENERIC_READ | GENERIC_WRITE,
(DWORD) 0,
NULL,
OPEN_ALWAYS,
FILE_ATTRIBUTE_NORMAL,
(HANDLE) NULL);
if (hf == INVALID_HANDLE_VALUE)
return FALSE;
hdr.bfType = 0x4d42;
hdr.bfSize = fileSizeInfo;
hdr.bfReserved1 = 0;
hdr.bfReserved2 = 0;
hdr.bfOffBits = (DWORD) sizeof(BITMAPFILEHEADER) +
pbih->biSize + pbih->biClrUsed
* sizeof (RGBQUAD);
if (!WriteFile(hf, (LPVOID) &hdr, sizeof(BITMAPFILEHEADER),
(LPDWORD) &dwTmp, NULL))
{
return FALSE;
}
if (!WriteFile(hf, (LPVOID) pbih, sizeof(BITMAPINFOHEADER)
+ pbih->biClrUsed * sizeof (RGBQUAD),
(LPDWORD) &dwTmp, ( NULL)))
{
return FALSE;
}
dwTotal = cb = pbih->biSizeImage;
hp = lpBits;
if (!WriteFile(hf, (LPSTR) hp, (int) cb, (LPDWORD) &dwTmp,NULL))
{
return FALSE;
}
if (!CloseHandle(hf))
return FALSE;
GlobalFree((HGLOBAL)lpBits);
return TRUE;
}