Zigbee之旅(五):几个重要的CC2430基础实验——串口通信
一、承上启下
在无线传感网络中,CC2430需要将采集到的数据发送给上位机(即PC)处理,同时上位机需要向CC2430发送控制信息。这一切都离不开两者之间的信息传递。这一节,我们就来学习如何实现PC机与CC2430之间的串口通信。
CC2430包括2个串行通信接口 USART0 与 USART1,每个串口包括两个模式:UART(异步)模式、SPI(同步)模式,本节仅涉及UART模式)。
二、串口通信实验
(1)实验简介
实现开发板与PC机的通信:PC向CC2430发送某一字符串,CC2430收到后返回此此字符串给PC。
(2)实验准备
开始编写代码之前,需要搭建好硬件设施:正确连线 + 安装USB转串的驱动。
硬件连线需要两条:
CC2430开发板的JTAG口 → 调试器 → PC的USB口(用于程序的调试、下载)
CC2430开发板的串口 → PC的USB口(用于PC与CC2430的数据通信)
然后需要安装USB转串口的驱动(下载地址)
为了向串口发送数据,还需要一个串口调试工具(下载地址)。
(3)程序流程图
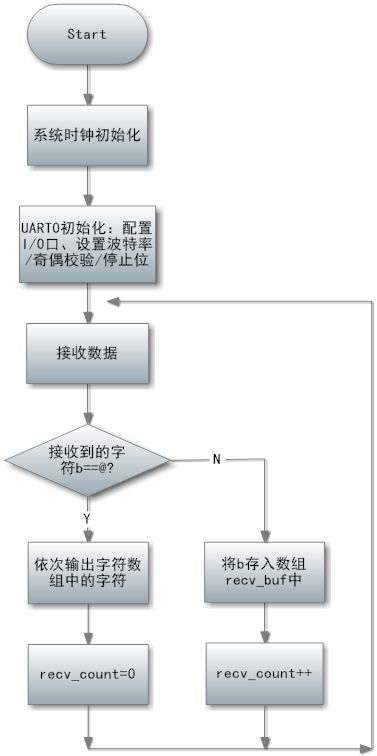
(4)实验源码及剖析
/*
实验说明:UART0,波特率115200bps,PC机向CC2430送字符串(以@字符结束),CC2430收到后返回该字符串
*/
#include <ioCC2430.h>
unsigned char recv_buf[300] = {0};
unsigned char recv_count = 0;
/*系统时钟初始化
-------------------------------------------------------*/
void xtal_init(void)
{
SLEEP &= ~0x04; //都上电
while(!(SLEEP & 0x40)); //晶体振荡器开启且稳定
CLKCON &= ~0x47; //选择32MHz 晶体振荡器
SLEEP |= 0x04;
}
/*UART0通信初始化
-------------------------------------------------------*/
void Uart0Init(unsigned char StopBits,unsigned char Parity)
{
PERCFG&= ~0x01; //选择UART0为可选位置一,即RXD接P0.2,TXD接P0.3
P0SEL |= 0x0C; //初始化UART0端口,设置P0.2与P0.3为外部设备IO口
U0CSR = 0xC0; //设置为UART模式,并使能接收器
U0GCR = 216;
U0BAUD = 11; //设置UART0波特率为115200bps,至于为何是216和11,可查阅CC2430中文手册
U0UCR |= StopBits|Parity; //设置停止位与奇偶校验
}
/*UART0发送数据
-------------------------------------------------------*/
void Uart0Send(unsigned char data)
{
while(U0CSR&0x01); //等待UART空闲时发送数据
U0DBUF = data;
}
/*UART0发送字符串
-------------------------------------------------------*/
void Uart0SendString(unsigned char *s)
{
while(*s != 0) //依次发送字符串s中的每个字符
Uart0Send(*s++);
}
/*UART0接受数据
-------------------------------------------------------*/
unsigned char Uart0Receive(void)
{
unsigned char data;
while(!(U0CSR&0x04)); //查询是否收到数据,否则继续等待
data=U0DBUF; //提取接收到的数据
return data;
}
/*主函数
-------------------------------------------------------*/
void main(void)
{
unsigned char i,b;
xtal_init();
Uart0Init(0x00,0x00); //初始化UART0,设置1个停止位,无奇偶校验
Uart0SendString("Please Input string ended with '@'!\r\n");
recv_count = 0;
while(1)
{
while(1)
{
b = Uart0Receive();UART
if(b=='@')break; //若接收到'@',则跳出循环,输出字符串
recv_buf[recv_count] = b; //若不是'@',则继续向字符数组recv_buf[]添加字符
recv_count++;
}
for(i=0; i<recv_count; i++) //输出字符串
Uart0Send(recv_buf[i]);
Uart0SendString("\n");
recv_count =0; //重置
}
}
首先配置USART0所对应的I/O口:通过对 PECFRG.0 清零来设置UART0为可选位置1,即RXD对应P0.2,TXD对应P0.3。然后配置P0.2和P0.3为外部设备I/O。
然后选择UART模式,并使能接收器。接着配置USART0的参数:波特率115200,无奇偶校验、停止位为1。
接着向PC发送一条字符串:Please Input string ended with '@'!,然后就使用while(1)不断地去试图获取接收的每一个字符。当此字符不为'@'时,则表示还未输入完成,继续将此字符添加到字符数组recv_buf中;当此字符正好为'@'时,则表示输入完成,因此跳出循环将recv_buf中的每一个字符按次序发送到PC,同时重置recv_count。
(5)实验结果
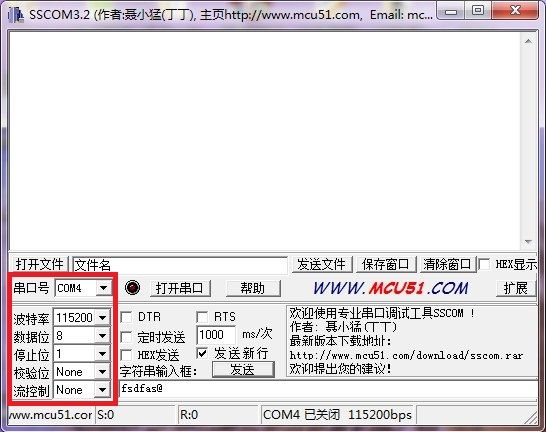
首先完成硬件连线,打开串口调试工具,配置参数如下图:
点击“打开串口”,然后启动IAR调试,让程序跑起来,你会发现串口调试工具上的接收框中出现了预期的字符串:
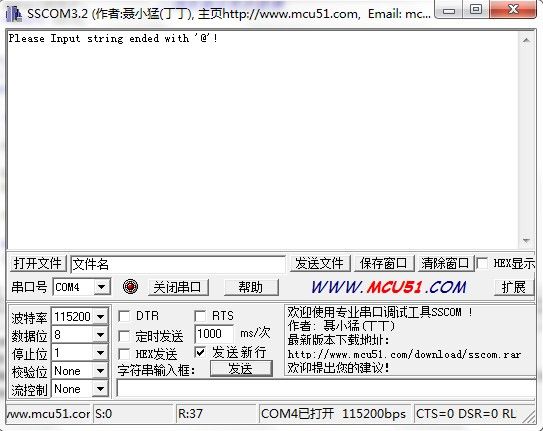
然后在串口调试工具中下方的发送textbox中,输入"Hello",如下所示:
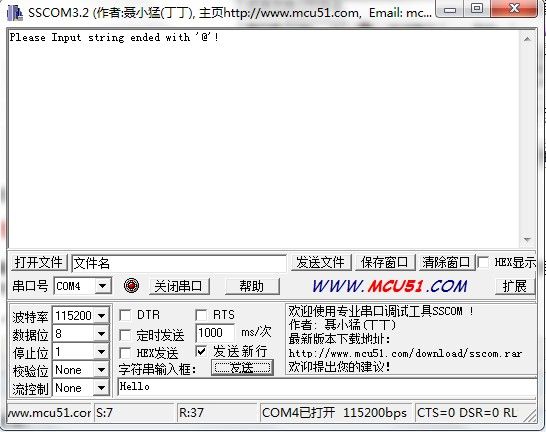
点击“发送”之后,你或许会奇怪,为什么CC2430不会返回你所输入的内容,那是因为你没有用@结尾。
我们再次输入"Zigbee!@",点击“发送”,结果如下所示:
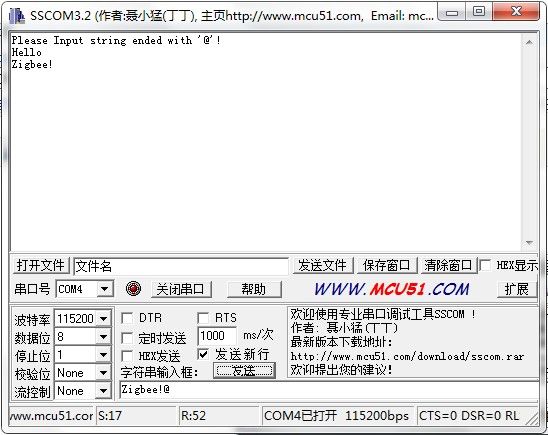
就会出现预期内容“Hello Zigbee!”了!到此实验结束~
三、结语
本篇介绍了CC2430开发板与上位机的通信。具备了串口通信的基础后,下一节我们来一起学习ADC(模数转换)单次采样。利用ADC,我们可以采集开发板上的温度传感器的值,并将温度值通过串口发送到PC上显示出来。