需要通过某种方式一次性地执行完读取、修改写入这三个操作,并且执行过程中不被其他线程中断,这种操作称为原子操作。
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
#define SIZE (100*1024*1024)
__global__ void histo_kernel( unsigned char *buffer,long size,unsigned int *histo ) {
__shared__ unsigned int temp[256]; //用来保存字母出现的个数,每个block中均有一个
temp[threadIdx.x] = 0;
__syncthreads();
// 第i个线程处理字母buffer[i],对应的temp加1
int i=threadIdx.x+blockIdx.x*blockDim.x;
int stride = blockDim.x * gridDim.x;
while (i < size) {
atomicAdd( &temp[buffer[i]], 1 );
i += stride;
}
// 等数据都写入到temp后,将每个block中的shared变量temp加到global变量histo中
// 因为每个block启动的线程数是256,所以可以刚好与disto、temp对应
__syncthreads();
atomicAdd( &(histo[threadIdx.x]), temp[threadIdx.x] );
}
void* big_random_block( int size ) {
unsigned char *data = (unsigned char*)malloc( size );
for (int i=0; i<size; i++)
data[i] = rand();
return data;
}
int main( void ) {
unsigned char *buffer =(unsigned char*)big_random_block( SIZE );//buffer数组分配值
//开始计时
cudaEvent_t start, stop;
cudaEventCreate( &start ) ;
cudaEventCreate( &stop ) ;
cudaEventRecord( start, 0 ) ;
unsigned char *dev_buffer;//设备上的buffer
unsigned int *dev_histo;//设备上的变量,存储每个字母出现的个数
cudaMalloc( (void**)&dev_buffer, SIZE ) ;
cudaMemcpy( dev_buffer, buffer, SIZE,cudaMemcpyHostToDevice ) ;
cudaMalloc( (void**)&dev_histo,256 * sizeof( int ) );
cudaMemset( dev_histo, 0,256 * sizeof( int ) ) ;//初始化为0
// 调用kernel采用“2x mps个数” 会得到最好性能
cudaDeviceProp prop;
cudaGetDeviceProperties( &prop, 0 ) ;
int blocks = prop.multiProcessorCount;
histo_kernel<<<blocks*2,256>>>( dev_buffer,SIZE, dev_histo );
unsigned int histo[256];
cudaMemcpy( histo, dev_histo,256 * sizeof( int ),cudaMemcpyDeviceToHost ) ;
// 计时结束
cudaEventRecord( stop, 0 ) ;
cudaEventSynchronize( stop ) ;
float elapsedTime;
cudaEventElapsedTime( &elapsedTime,start, stop ) ;
printf( "Time to generate: %3.1f ms\n", elapsedTime );
long histoCount = 0;
for (int i=0; i<256; i++) {
histoCount += histo[i];
}
printf( "Histogram Sum: %ld\n", histoCount );
// 检测是否与CPU版本一样
for (int i=0; i<SIZE; i++)
histo[buffer[i]]--;
for (int i=0; i<256; i++) {
if (histo[i] != 0)
printf( "Failure at %d!\n", i );
}
cudaEventDestroy( start ) ;
cudaEventDestroy( stop ) ;
cudaFree( dev_histo );
cudaFree( dev_buffer );
free( buffer );
return 0;
}
CUDA流在加速应用程序方面起着重要的作用。cuda流表示一个GPU队列,并且队列中的操作将以制定顺序执行。我们能够在流中添加一些操作,例如核函数启动、内存复制,以及事件的启动和结束等。这些操作添加的顺序就是流的执行顺序。可以将每个流视为GPU上的一个任务,并且这些任务可以并行执行。第0个流执行核函数的同时,第1个流执行复制。。。
虽然逻辑上每个流之间是相互独立的,然而,硬件中并没有流的概念,例如,内存复制操作在硬件是是必须排队的。CUDA驱动程序负责对用户和硬件进行协调。操作被添加的顺序包含的依赖性,进入硬件后进行内存复制和核函数执行的排队时,这些依赖性会丢失,CUDA驱动程序需要确保不破坏流内部的依赖性。
例如:硬件上内存复制引擎的队列以及核函数执行引擎的队列如图
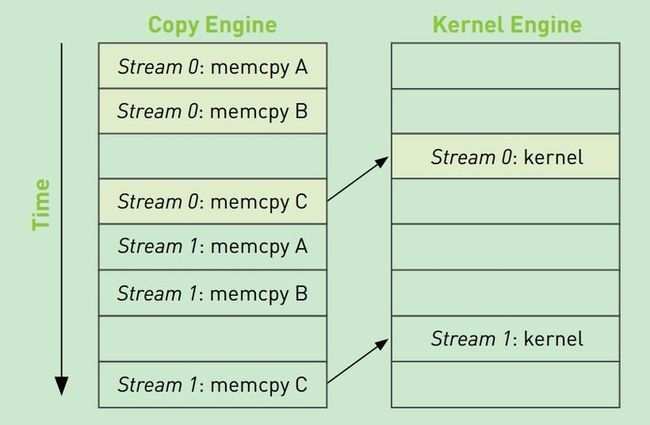
如果 stream0:memcpy C 必须等待stream0:kernel执行完,这时候stream1:memcpy A以及后续的copy工作被阻塞了。将操作放入流中的顺序影响CUDA驱动程序调度这些操作及执行方式。
这个调度应该进行如下修改:
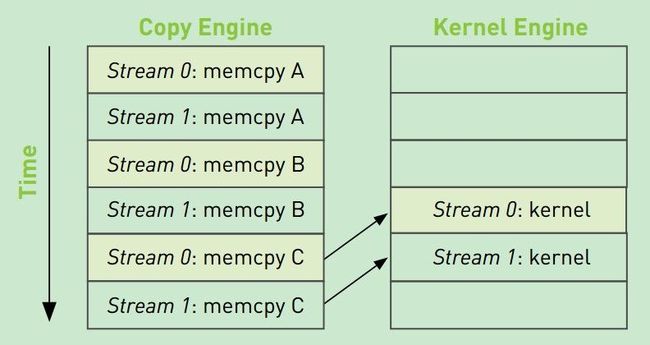
第0个流复制A,B后,第0个流的kernel就开始执行,这时候第一个流可以复制A,B。这样使得GPU并行的执行复制操作和核函数。
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include<math.h>
#define N (1024*1024)
#define FULL_DATA_SIZE (N*20)
__global__ void kernel( int *a, int *b, int *c ) {
int idx = threadIdx.x + blockIdx.x * blockDim.x;
if (idx < N) {
int idx1 = (idx + 1) % 256;
int idx2 = (idx + 2) % 256;
float as = (a[idx] + a[idx1] + a[idx2]) / 3.0f; //从index开始的三个值的平均值
float bs = (b[idx] + b[idx1] + b[idx2]) / 3.0f;
c[idx] = (as + bs) / 2; //写入到缓冲区c
}
}
int main( void ) {
cudaDeviceProp prop;
int whichDevice;
cudaGetDevice( &whichDevice ) ;
cudaGetDeviceProperties( &prop, whichDevice ) ;
if (!prop.deviceOverlap) {
printf( "Device will not handle overlaps, so no speed up from streams\n" );
return 0;
}
cudaEvent_t start, stop;
float elapsedTime;
cudaStream_t stream0, stream1; //主函数中定义两个流
int *host_a, *host_b, *host_c; //主机上的a,b,c
int *dev_a0, *dev_b0, *dev_c0;
int *dev_a1, *dev_b1, *dev_c1;
cudaEventCreate( &start ) ;
cudaEventCreate( &stop ) ;
//初始化流
cudaStreamCreate( &stream0 ) ;
cudaStreamCreate( &stream1 ) ;
// allocate the memory on the GPU
cudaMalloc( (void**)&dev_a0,N * sizeof(int) ) ;
cudaMalloc( (void**)&dev_b0,N * sizeof(int) ) ;
cudaMalloc( (void**)&dev_c0,N * sizeof(int) ) ;
cudaMalloc( (void**)&dev_a1,N * sizeof(int) ) ;
cudaMalloc( (void**)&dev_b1,N * sizeof(int) ) ;
cudaMalloc( (void**)&dev_c1,N * sizeof(int) ) ;
// allocate host locked memory, used to stream
//cudaHostAlloc是CUDA运行时在主机上分配内存,这个内存是不可分页内存(malloc分配可以分页内存)
//操作系统不会对这块内存分页并交换到磁盘上,从而确保了该内存始终驻留在物理内存中,因此它能被
//安全的访问,因为它不会被破坏会重定位。从而可以采用DMA技术在GPU和主机之间复制数据,这个过程
//无需CPU介入,这种操作会比分页内存性能高约2倍。但使用固定内存会丧失虚拟内存的所以功能。
//这使得固定内存跟容易耗尽内存
cudaHostAlloc( (void**)&host_a,FULL_DATA_SIZE * sizeof(int),cudaHostAllocDefault ) ;
cudaHostAlloc( (void**)&host_b,FULL_DATA_SIZE * sizeof(int),cudaHostAllocDefault ) ;
cudaHostAlloc( (void**)&host_c,FULL_DATA_SIZE * sizeof(int),cudaHostAllocDefault ) ;
for (int i=0; i<FULL_DATA_SIZE; i++) {
host_a[i] = rand();
host_b[i] = rand();
}
cudaEventRecord( start, 0 ) ;
for (int i=0; i<FULL_DATA_SIZE; i+= N*2) {
// enqueue copies of a in stream0 and stream1
cudaMemcpyAsync( dev_a0, host_a+i,N * sizeof(int),cudaMemcpyHostToDevice,stream0 ) ;
cudaMemcpyAsync( dev_a1, host_a+i+N,N * sizeof(int),cudaMemcpyHostToDevice,stream1 ) ;
// enqueue copies of b in stream0 and stream1
cudaMemcpyAsync( dev_b0, host_b+i,N * sizeof(int),cudaMemcpyHostToDevice,stream0 ) ;
cudaMemcpyAsync( dev_b1, host_b+i+N,N * sizeof(int),cudaMemcpyHostToDevice,stream1 ) ;
// enqueue kernels in stream0 and stream1
kernel<<<N/256,256,0,stream0>>>( dev_a0, dev_b0, dev_c0 );
kernel<<<N/256,256,0,stream1>>>( dev_a1, dev_b1, dev_c1 );
// enqueue copies of c from device to locked memory
cudaMemcpyAsync( host_c+i, dev_c0,N * sizeof(int),cudaMemcpyDeviceToHost,stream0 ) ;
cudaMemcpyAsync( host_c+i+N, dev_c1,N * sizeof(int),cudaMemcpyDeviceToHost,stream1 ) ;
}
cudaStreamSynchronize( stream0 ) ;
cudaStreamSynchronize( stream1 ) ;
cudaEventRecord( stop, 0 ) ;
cudaEventSynchronize( stop ) ;
cudaEventElapsedTime( &elapsedTime,start, stop ) ;
printf( "Time taken: %3.1f ms\n", elapsedTime );
// 要释放掉cudaHostAlloc分配的内存
cudaFreeHost( host_a ) ;
cudaFreeHost( host_b ) ;
cudaFreeHost( host_c ) ;
cudaFree( dev_a0 ) ;
cudaFree( dev_b0 ) ;
cudaFree( dev_c0 ) ;
cudaFree( dev_a1 ) ;
cudaFree( dev_b1 ) ;
cudaFree( dev_c1 ) ;
cudaStreamDestroy( stream0 ) ;
cudaStreamDestroy( stream1 ) ;
return 0;
}