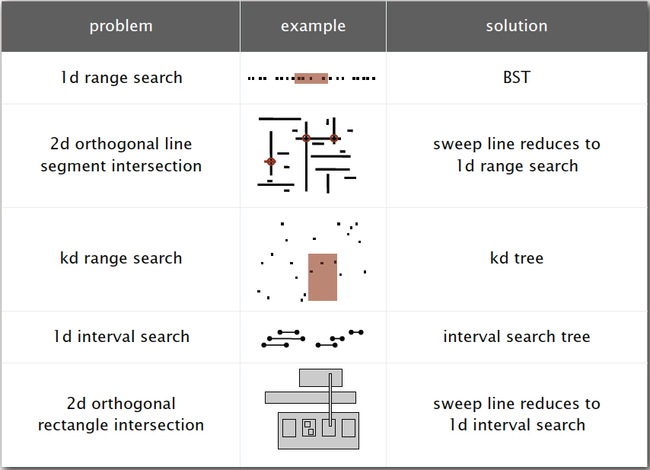
1. 1d range search
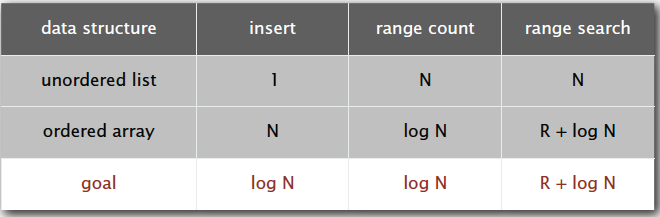
-- Range search: find all keys between k1 and k2.
-- Range count: number of keys between k1 and k2.
-- BST Implementation of range count: rank(k) -- number of keys < k (Running time : O(logN)
public int size(Key lo, Key hi)
{
if (contains(hi)) return rank(hi) - rank(lo) + 1;
else return rank(hi) - rank(lo);
}
-- BST Implementation of range search: (Running time : O(R + NlogN)
-- Recursively find all keys in left subtree (if any could fall in range).
-- Check key in current node.
-- Recursively find all keys in right subtree (if any could fall in range).
2. Orthogonal line segment intersection
-- Given N horizontal and vertical line segments, find all intersections.
-- Assumption: All x- and y-coordinates are distinct.
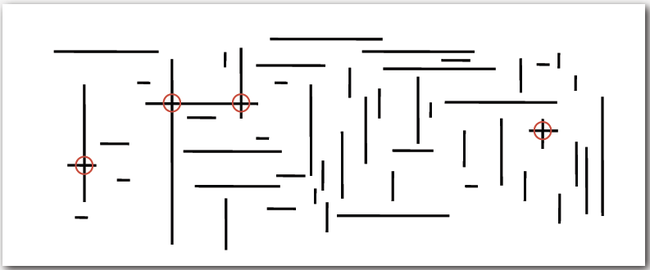
3. Sweep-line Algorithm
-- Algorithm:
-- x-coordinates define events.
-- h-segment (left endpoint): insert y-coordinate into BST.
-- h-segment (right endpoint): remove y-coordinate from BST.
-- v-segment: range search for interval of y-endpoints.
-- Running Time:
-- Put x-coordinates on a PQ (or sort). ---- N log N
-- Insert y-coordinates into BST. ---- N log N
-- Delete y-coordinates from BST. ---- N log N
-- Range searches in BST. ---- N log N + R
-- Reduces 2d orthogonal line segment intersection search to 1d range search.

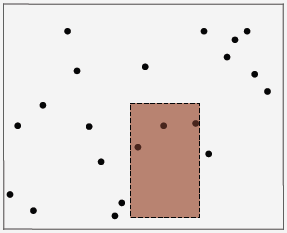
4. 2-d orthogonal range search:
-- Extension of ordered symbol-table to 2d keys.
-- Insert a 2d key.
-- Delete a 2d key.
-- Search for a 2d key.
-- Range search: find all keys that lie in a 2d range.
-- Range count: number of keys that lie in a 2d range.
-- Geometric interpretation.
-- Keys are point in the plane.
-- Find/count points in a given horizontal-vertical rectangle
5. Grid implementation
-- Algorithm
-- Divide space into M-by-M grid of squares.
-- Create list of points contained in each square.
-- Use 2d array to directly index relevant square.
-- Insert: add (x, y) to list for corresponding square.
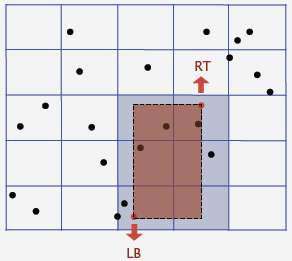
-- Range search: examine only squares that intersect 2d range query.
-- Space-time tradeoff.
-- Space: M^2 + N.
-- Time: 1 + N / M^2 per square examined, on average.
-- Grid square size too small: wastes space.
-- Grid square size too large: too many points per square.
-- Rule of thumb: √N-by-√N grid.
-- Running time. [if points are evenly distributed and M ~ √N ]
-- Initialize data structure: N.
-- Insert point: 1.
-- Range search: 1 per point in range.
-- Clustering : a well-known phenomenon in geometric data.
-- Lists are too long, even though average length is short.
-- Need data structure that adapts gracefully to data.
6. Space-partitioning trees:
-- Use a tree to represent a recursive subdivision of 2d space.
-- Implementation : BST, but alternate using x- and y-coordinates as key.
-- Search gives rectangle containing point.
-- Insert further subdivides the plane.
-- Range search in a 2d tree : (Running time : typical case : R + log N , worst case : R + √N)
-- Check if point in node lies in given rectangle.
-- Recursively search left/bottom (if any could fall in rectangle).
-- Recursively search right/top (if any could fall in rectangle).
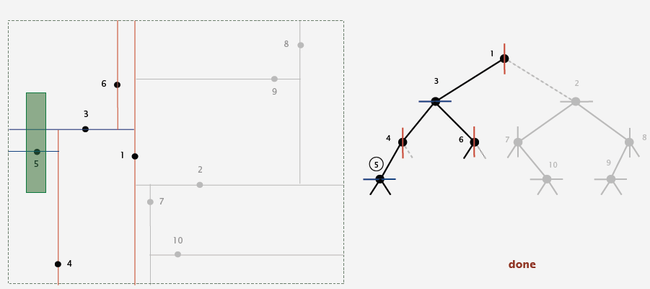
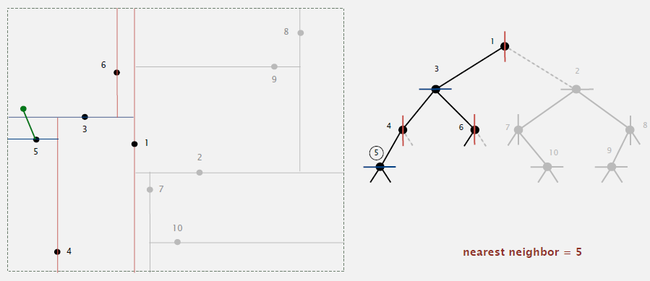
-- Nearest neighbor search in a 2d tree : (Running time : typical case : log N , worst case : N)
-- Check distance from point in node to query point.
-- Recursively search left/bottom (if it could contain a closer point).
-- Recursively search right/top (if it could contain a closer point).
-- Organize method so that it begins by searching for query point.
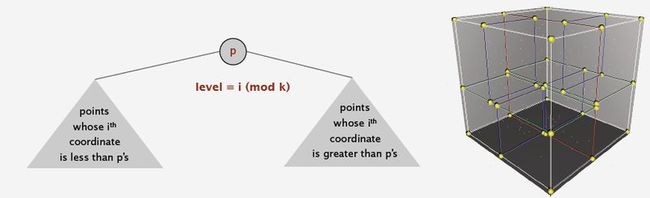
7. Kd tree ---- Recursively partition k-dimensional space into 2 halfspaces.
-- Implementation: BST, but cycle through dimensions ala 2d trees.
8. 1d interval search
-- Data structure to hold set of (overlapping) intervals.
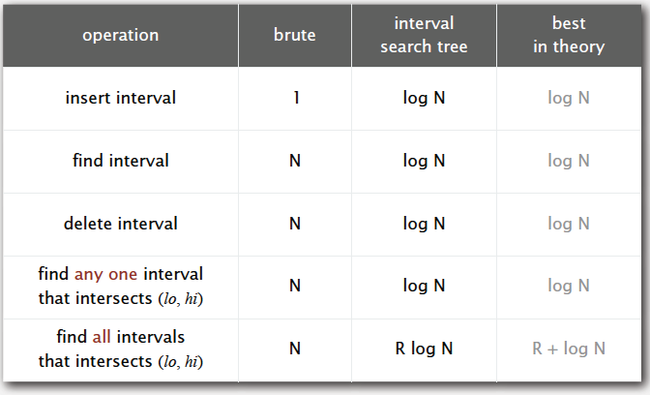
-- Insert an interval ( lo, hi ).
-- Search for an interval ( lo, hi ).
-- Delete an interval ( lo, hi ).
-- Interval intersection query: given an interval ( lo, hi ), find all intervals in data structure overlapping ( lo, hi ).
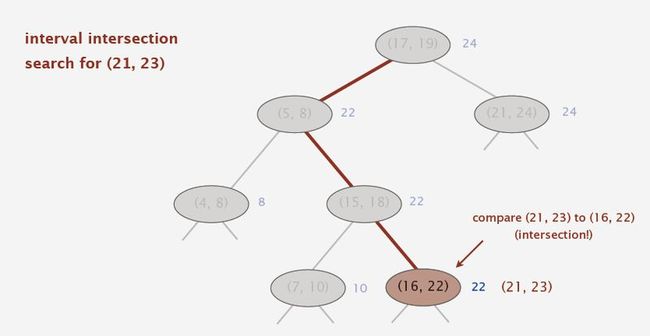
9. Interval search trees
-- Create BST, where each node stores an interval ( lo, hi ).
-- Use left endpoint as BST key.
-- Store max endpoint in subtree rooted at node.
-- To insert an interval ( lo, hi ) :
-- Insert into BST, using lo as the key.
-- Update max in each node on search path.
-- To search for any one interval that intersects query interval ( lo, hi ) :
-- If interval in node intersects query interval, return it.
-- Else if left subtree is null, go right.
-- Else if max endpoint in left subtree is less than lo, go right.
-- Else go left.
-- Running Time :
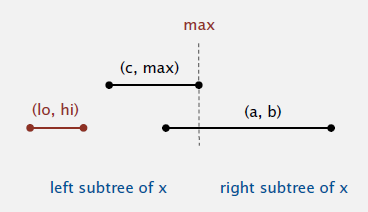
10. Proof of correctness of Interval Search :
-- Case 1. If search goes right, then no intersection in left.
-- Left subtree is empty ⇒ trivial.
-- Max endpoint max in left subtree is less than lo ⇒ for any interval (a, b) in left subtree of x, we have b ≤ max < lo.
-- Case 2. If search goes left, then there is either an intersection in left subtree or no intersections in either.
-- Suppose no intersection in left. Since went left, we have lo ≤ max. Then for any interval (a, b) in right subtree of x, hi < c ≤ a where c is the left endpoint of interval with max right endpoint ⇒ no intersection in right.
11. Orthogonal rectangle intersection:
-- Goal. Find all intersections among a set of N orthogonal rectangles.
-- Sweep Line Algorithm:
-- Sweep vertical line from left to right.
-- x-coordinates of left and right endpoints define events.
-- Maintain set of rectangles that intersect the sweep line in an interval search tree (using y-intervals of rectangle).
-- Left endpoint: interval search for y-interval of rectangle: insert y-interval.
-- Right endpoint: remove y-interval.
-- Running Time :
-- Put x-coordinates on a PQ (or sort). ---- N log N
-- Insert y-intervals into ST. ---- N log N
-- Delete y-intervals from ST. ---- N log N
-- Interval searches for y-intervals. ---- N log N + R log N
-- Reduces 2d orthogonal rectangle intersection search to 1d interval search.
12. Summary: