from: http://blog.csdn.net/popy007/article/details/8477484
深入探索3D拾取技术
3D拾取
在游戏中,玩家需要通过点击2D屏幕来选择3D物体,这个过程就是拾取(picking)。拾取是3D游戏必不可少的基本操作,它实现了玩家和游戏世界内对象的交互。
虽 然拾取技术很基本,但它却迷惑了很多3D初学者。很多朋友都问过我关于拾取的细节问题,这让我觉得很有必要具体探讨一下该技术。 其实,拾取之所以让很多开发者感到复杂,主要原因在于它跨域了流水线的多个阶段,并且是逆流水线上行。另外,它是一个2D信息扩展到3D的过程,必须对信 息做相应的扩展和额外的计算才能够得到正确的结果。下面我门具体分析一下这个技术。
水流线主要阶段分析
我们来直观地看一下从相机空间到viewport的变换图:
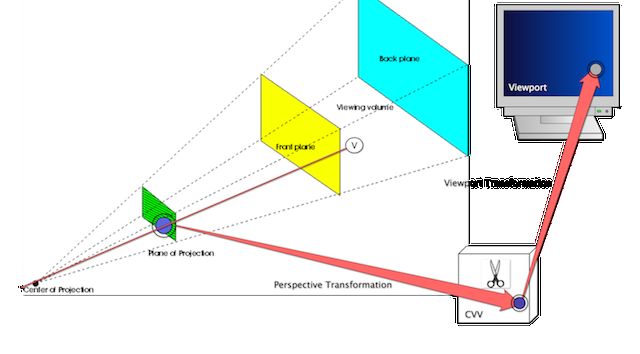
相机空间中的一个顶点v,经过透视变换后进入了CVV中。这个变换矩阵实际上完成了两个工作:
1)将顶点从3D空间投影到2D的投影平面(Projection Plane)上。
2)将投影平面上的2D投影点通过线性插值变换到齐次裁剪空间CVV中。
这些变换都通过透视矩阵一次完成(如果对此不是很了解,请参考《深入探索透视投影变换》一文)。 我之所以把这一步分解为两步,因为这对于分析拾取很重要。
顶点进入齐次裁剪空间并经过CVV裁剪,最终进行透视除法从4D齐次形式变回成3D形式。然后经过一个线性插值(被封装在视口(viewport)变换中),变换到viewport中,多个点以三角形的形式经过光栅化后被玩家看到。最后一步的点变换可以描述为:
3)将CVV中的点通过线性插值变换到viewport中。
分 析了这个变换过程之后,我们知道了从相机空间开始实际处理点位置信息的操作,就是上面的三个步骤。这样,我们可以先把顶点从viewport中先变换回投 影平面上,也就是我们可以先完成(2)和(3)的逆处理。这里我们不用考虑裁剪和透视除法这些操作,因为反推的时候,处于视口中的点,已经是经过裁剪后留 下的有效点了,必定处于CVV内,也必定处于projection plane内!而且从viewport逆变换到projection plane,点一直保持2D形式。
picking 的开始是玩家在屏幕上点击一个位置——这实际上是在viewport中进行了点击。我们通过响应玩家的点击事件,得到在viewport中的点击位置,记 为P0(Xp0,Yp0)。然后我们把p0从viewport中线性插值到CVV中,得到P1(Xp1,Yp1):
上面的线性插值(如果对线性插值公式不熟悉,请参考《深入探索透视投影变换》一文中的线性插值部分)公式在x方向上计算出了CVV中的P1,y方向的公式同理。接下来我们再把P1从CVV中变换到projection plane中,得到P2(Xp2,Yp2): 
y方向的计算同理。P2就是viewport中玩家点击的点在projection plane上所对应的位置。
目前来看很好。我们已经获得了相机空间中的投影平面上,玩家点击的位置。但目前的点是一个2D点——它处于投影平面上。玩家需要拾取的是一个3D对象,因此我们需要将2D信息拓展到3D中。
向3D世界拓展
将2D的点信息拓展到3D空间进行picking,会使用射线(ray)进行。ray就是一端固定,另一端无限延伸的线性模型。如下图所示:
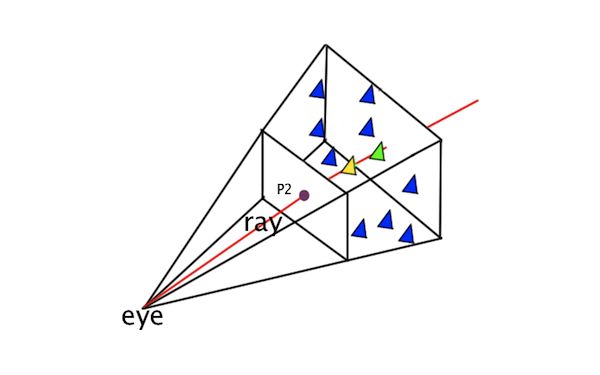
在相机空间中,红线标明的就是用于picking的ray。它的固定端就是 eye的位置(也就是相机空间的原点),并且穿过我们刚刚求出来的projection plane上面的点P2。射线向空间无限延伸,第一个穿过的polygon应该就是picking到的结果。在图中,有两个polygon被 picking到:绿色和黄色的。其中黄色的polygon是第一个被穿过的,因此picking操作返回的结果就是这个polygon。在实现中,我们 一般有两种方式来表示一个ray:
struct Ray3D
{
Point3D m_startingPos;
Point3D m_penetratedPos;
};
struct Ray3D
{
Point3D m_startingPos;
Point3D m_direction;
};
第一种方式标明了ray的起始点m_startingPos和任意一个穿过点m_penetrated。第二种方式标明了ray的起始点m_startingPos和方向m_direction。这两种方式可以很方便的相互转换。
在有了ray的表示法之后,我们要做的就是判断ray是否和各个polygon产生了相交——这实际上是一个射线和三角形的相交判断算法。这种算法很普遍,很容易找到,这里我们不进行讨论。最基本的拾取算法(相机空间中)如下所示;
extern float ray_triangle_intersection( const Ray3D& ray, const Polygon& polygon );
GameObject* picking( const Point3D& P2, const std::vector< GameObject* >& objects )
{
Ray3D ray;
ray.m_startingPos = Point3D( 0, 0, 0 );
ray.m_penetratedPos = P2;
float minDistance = 10000.0; // Big enough
GameObject* intersected = NULL;
for( int i = 0; i < objects.size(); ++i )
{
GameObject* obj = objects[i];
for( int j = 0; j < obj->number_polygons(); ++j )
{
Polygon* triangle = obj->get_polygon( j );
float distance = ray_triangle_intersection( ray, *triangle );
if( distance > 0.0 ) // Penetrated
{
if( distance < minDistance )
{
minDistance = distance;
intersected = obj;
}
}
}
}
return intersected;
}
这 个暴力算法首先生成了相机空间中的ray,然后遍历所有的游戏对象,并遍历每个游戏对象的每一个多边形,用 ray_triangle_intersection函数做射线交叉判断,如果返回正值,则证明穿插并表示ray起始点到穿插的距离,负值则表示没有穿 插。函数判断每个穿插的多边形,保留最近的一个返回,如果没有任何穿插,则返回NULL。这里值得一提的是关于判断的优化问题。 ray_triangle_intersection算法虽然可以优化,但对于一个规模较大的场景或者模型的polygon数量比较大的场景,通过这种暴 力法遍历所有polygon,在效率上是不能够接受的。需要采用以下两种方式进行优化:
1)采用场景管理方法,用层次结构的方法提前剔除大量不在视线中的多边形。只留下视线中的多边形。
2)以包围体为单位进行ray相交判断,而不是三角形。比如包围盒、包围球等等,变成了ray和矩形、球体进行相交判断。一个游戏对象一般都可以分解为多个包围体。
除 了上面的方法,还有很多其他高级的方式可以用于这种优化,这通常和你的游戏场景管理方法和3D对象表示方法有关。特别地,如果使用的是正交投影 (Orthogonal Projection),则不需要使用ray,直接在平面上判断就可以了,这将退化为一个2D picking问题。
回到世界空间?
接下来的问题会有一些策略性。我们要决定的是picking在当前相机空间种进行还是在世界空间进行。我们已经处理了相机空间中的picking,但有一个问题:在程序中,我们一般不会保留相机空间中每个3D物体的位置,因此在这种情况下,我们会采用两个办法之一:
1)将ray用逆相机矩阵变换到世界空间中。
2)将物体用世界矩阵和相机矩阵变换到相机空间中进行picking,就如我们上面的处理方式。
但 就算我们采用了第1种方式,我们也必须用世界矩阵变换一下模型,让他们从模型空间变换到世界空间中——这导致在这种picking方式下,我们既需要变换 模型,又要变换ray(除非把ray一直变到模型空间中,这也行)。但在一般的游戏中,我们会保留一个“模型-视图”矩阵——也就是世界矩阵和相机矩阵的 归并,在这种情况下,采用第2种方式的代价比第1种要小——ray不需要任何变换。值得注意的一点是,如果采用第一种方式,并且使用了上面所描述的ray 的第2种表达结构,对于m_direction的变换,需要采用相机逆矩阵的逆转置,这和变换polygon的法线是同一个道理,对于此问题迷惑的读者可 以搜索法线变换相关主题。
总结
到 目前位置,我们已经探讨了关于3D picking的主要理论方法。很多图形API(比如OpenGL)都提供了相关的方法来简化picking操作,可能picking的阶段有所差异,或 者进行了某些优化,或者CVV定义不同,而原理大同小异。但一个统一的要求就是需要对流水线有一个细节层次上的认识,如此才能在不断变化的需求中找到合理 的解决方案。