PhysX SDK物理引擎开发包使用教程
AGEIA的PhysX处理器是世界上首款物理模拟处理器 (PPU), 该处理器将解除中央处理器进行物理模拟的负担。PhysX PPU 的设计构架基于顶点的多线程操作,允许游戏开发人员进行精确、流畅和动画创作和运动模拟,例如毛发、布料、液体、流体等。目前 AGEIA 的PhysX处理器是世界上第一款也是唯一一款专注于物理算法处理器的产品.
利用PhysX SDK物理引擎开发包来实现我们仿真的效果时,一般需要以下几个步骤:
(1)
PrintControls();
(2)
InitGlut(argc, argv);
(3)
InitNx();
(4)
glutMainLoop();
(5)
ReleaseNx();
其中最为主要的函数是InitNx(),也既是初始化PhysX,创建一个PhysX SDK实例以及建立我们的场景。下面具体分析各个函数的作用。
一.
PrintControls();
显而易见,利用该函数的目的是在告诉玩家该如何进行操作。操作的按键可根据自己的喜好进行设置。
二.
InitGlut(argc, argv);
PhysX是OpenGL上开发的,所以在初始化PhysX实例之前,必须建立一个OpenGL的框架。
①.
glutInit(&argc, argv) 用来初始化GLUT,并且处理任意的命令行变量
②.
glutInitWindowSize(int width, int size) 指定了窗口以像素为单位的尺寸
③.
glutInitDisplayMode(GLUT_RGB | GLUT_DOUBLE | GLUT_DEPTH) 建立一个带有双缓存、RGB颜色模型和很大缓存的窗口
④.
glutCreateWindow(char* string) 创建一个具有OpenGL创建的窗口,string为该窗口的窗口名
⑤.
glutSetWindow()
⑥.
glutDisplayFunc(RenderCallback) 渲染
ProcessCameraKeys();
SetupCamera();
if (gScene && !bPause)
{
GetPhysicsResults();
ProcessInputs();根据选择的对象,给该对象施加前后、上下、左右不同方向的力,然后调用对象的方法addForce,产生不同的物理效果
StartPhysics();
}
// Display scene
RenderActors(bShadows);
调用函数DrawActor(NxActor* actor)将场景中的物体渲染出来,实在是在DrawActor(NxActor* actor)函数中根据物体形状调用不同形状的绘画函数将物体渲染出来的。在渲染的过程中,利用显示列表绘制不同形状的物体。在PhysX中,物体形状分为以下几种:NX_SHAPE_PLANE(面板状), NX_SHAPE_BOX(盒子状), NX_SHAPE_ SPHERE(球形状), NX_SHAPE_CAPSULE(胶囊状), NX_SHAPE_CONVEX(凸多边形状), NX_SHAPE_MESH(网状状)。
当bShadows为true时,渲染物体的阴影;为false时就不绘制
DrawForce(box, gForceVec, NxVec3(1,1,0));
将物体受力的受力方向渲染出来
⑦.
glutReshapeFunc(ReshapeCallback)
设置窗口
⑧.
glutIdleFunc(IdleCallback);
⑨.
glutKeyboardFunc(KeyboardCallback);
⑩.
glutKeyboardUpFunc(KeyboardUpCallback);
⑪.
glutSpecialFunc(SpecialCallback);
在此,调用ResetNx(),重新渲染
⑫.
glutMouseFunc(MouseCallback);
⑬.
glutMotionFunc(MotionCallback);
⑭.
MotionCallback(0,0);
三.
InitNx() 因为我们需要初始化PhysX SDK实例,并且建立我们需要的场景;所以我们需要设置以下几个变量,并且将它们设置为全局变量
NxPhysicsSDK*
gPhysicsSDK = NULL;
//PhysX SDK实例对象
NxScene*
gScene = NULL;
//场景对象
NxVec3
gDefaultGravity(0,-9.8,0);
***注意:坐标系的方向指向,在PhysX、OpenGL以及3DMax都有一些不一样,当运行里面的demo的时候就可以体会到。它们的坐标系分别如下: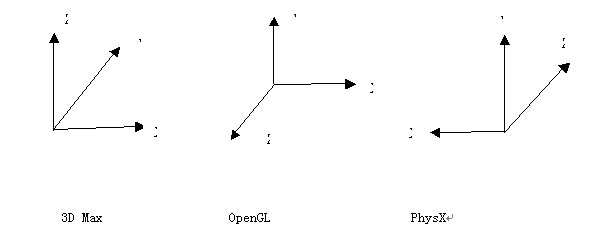
下面就在InitNx()中开始初始化实例以及建立场景.
①.
实例化 physics SDK
gPhysicsSDK = NxCreatePhysicsSDK(NX_PHYSICS_SDK_VERSION);
初始化完Physics SDK后,只是简单的一个实例。可以通过设置实例的物理参数来充实我们的模拟效果.
gPhysicsSDK->setParameter(NX_SKIN_WIDTH, 0.01);
②.
创建场景
NxSceneDesc sceneDesc;
//场景表述表对象
sceneDesc.gravity= gDefaultGravity;
sceneDesc.broadPhase= NX_BROADPHASE_COHERENT;
sceneDesc.collisionDetection = true;
gScene = gPhysicsSDK->createScene(sceneDesc);
在PhysX中,不管是创建场景还是创建各个物体角色时,都是先通过各自对应的描述器(翻译的不是很准确)设置场景和各个物体的物理参数,用来模拟真实的世界环境和物体。建立好表述器后,通过函数
createSce
ne(
NxSceneDesc
)函数就可以建立需要的场景对象。
一般情况下,场景描述器的参数就是设置重力加速度
sceneDesc.gravity
,是否进行碰撞检测
collisionDetection
, true为进行,
在PhysX SDK中描述器被广泛的应用. 描述器包括所有你创建物体的信息
broadphase-coherent
是三种碰撞检测中的一种。
gPhysicsSDK->setParameter(NX_SKIN_WIDTH, 0.01);
当相互碰撞的物体的材质都很软的时候,在现实中就会发现当发生碰撞的时候物体之间就会相互嵌入一部分,在这里我们就可以利用物理参数
NX_SKIN_WIDTH
,它的默认值为0.05m,该值越大,嵌入的就越多
同时,我们可以对场景中的所有物体创建材质。创建的材质定义了碰撞和物体材料的物理属性。比如反弹系数、静摩擦力、滑动摩擦力等。
// Create the default material
通过材质索引创建一个材质的对象
NxMaterial* defaultMaterial = gScene->getMaterialFromIndex(0);
defaultMaterial->setRestitution(0.5);
defaultMaterial->setStaticFriction(0.5);
defaultMaterial->setDynamicFriction(0.5);
创建物体,以box为例
NxActor* box = CreateBox(NxVec3(5,1,0));
NxActor* CreateBox(const NxVec3& pos)
{
// Add a single-shape actor to the scene
NxActorDesc actorDesc;
NxBodyDesc bodyDesc;
// The actor has one shape, a box
NxBoxShapeDesc boxDesc;
boxDesc.dimensions.set(0.5,1,0.5);
actorDesc.shapes.pushBack(&boxDesc);
actorDesc.body = &bodyDesc;
actorDesc.density = 10;
actorDesc.globalPose.t = pos;
return gScene->createActor(actorDesc);
}
我们创建一个角色参与者box,它的类型为
NxActor*
。建立该对象的时候需要设置它的描述器,然后利用函数
createActor(NxActorDesc actorDesc)
将该对象加入场景中。每一个对象又有和自己形状相对应的描述器。利用它设置对象的物理参数。
boxDesc
该描述器描述了该盒子的长、宽、高分别为0.5,初始化的位置以及该盒子的密度。
③.
创建完所有的物体对象时,调用
UpdateTime()
得到从上一帧渲染到现在经过的时间
④.
当创建的场景成功,利用函数
StartPhysics()
开始它的第一帧模拟。
void StartPhysics()
{
// Update the time step
NxReal deltaTime = UpdateTime();
// Start collision and dynamics for delta time since the last frame
gScene->simulate(deltaTime);
gScene->flushStream();
}
simulate(deltaTime)
是PhysX 解决物理学的关键
flushStream()
对时间步进行仿真
四.
glutMainLoop()
程序将一直停留在glutMainLoop()中,直到用户自己结束。当场景一旦被渲染后,
在
每次
设置下一场景时
,
RenderCallback()
回调函数
将
被调用
五.
ReleaseNx()
删除场景中所有的物体对象以及场景本身