Qemu对x86复位状态的模拟
快乐虾
http://blog.csdn.net/lights_joy/
本文适用于
QEMU-0.10.5
VS2008
欢迎转载,但请保留作者信息
1.1 X86复位后的行为
关于x86复位后的行为,intel的手册上是这样说的:
Following power-up or an assertion of the RESET# pin, each processor on the system
bus performs a hardware initialization of the processor (known as a hardware reset)
and an optional built-in self-test (BIST). A hardware reset sets each processor’s
registers to a known state and places the processor in real-address mode. It also
invalidates the internal caches, translation lookaside buffers (TLBs) and the branch
target buffer (BTB). At this point, the action taken depends on the processor family:
• Pentium 4 and Intel Xeon processors — All the processors on the system bus
(including a single processor in a uniprocessor system) execute the multiple
processor (MP) initialization protocol. The processor that is selected through this
protocol as the bootstrap processor (BSP) then immediately starts executing
software-initialization code in the current code segment beginning at the offset in
the EIP register. The application (non-BSP) processors (APs) go into a Wait For
Startup IPI (SIPI) state while the BSP is executing initialization code. See Section
7.5, “Multiple-Processor (MP) Initialization,” for more details. Note that in a
uniprocessor system, the single Pentium 4 or Intel Xeon processor automatically
becomes the BSP.
• P6 family processors — The action taken is the same as for the Pentium 4 and
Intel Xeon processors (as described in the previous paragraph).
也就是说它做了几件事:
1、复位内部寄存器的值。
2、将芯片置为实模式。
3、使内部缓存、TLB和BTB失效。
4、执行MP初始化协议,选择启动一个CPU,其它总线上的CPU进入等待状态。
5、主CPU开始执行CS:EIP的代码。
1.2 Qemu对内部寄存器的模拟
Qemu使用了一个叫CPUX86State的结构体来表示CPU的所有状态:
typedef struct CPUX86State {
/* standard registers */
target_ulong regs[CPU_NB_REGS];
target_ulong eip;
target_ulong eflags; /* eflags register. During CPU emulation, CC
flags and DF are set to zero because they are
stored elsewhere */
/* emulator internal eflags handling */
target_ulong cc_src;
target_ulong cc_dst;
uint32_t cc_op;
int32_t df; /* D flag : 1 if D = 0, -1 if D = 1 */
uint32_t hflags; /* TB flags, see HF_xxx constants. These flags
are known at translation time. */
uint32_t hflags2; /* various other flags, see HF2_xxx constants. */
/* segments */
SegmentCache segs[6]; /* selector values */
SegmentCache ldt;
SegmentCache tr;
SegmentCache gdt; /* only base and limit are used */
SegmentCache idt; /* only base and limit are used */
target_ulong cr[5]; /* NOTE: cr1 is unused */
uint64_t a20_mask;
/* FPU state */
unsigned int fpstt; /* top of stack index */
unsigned int fpus;
unsigned int fpuc;
uint8_t fptags[8]; /* 0 = valid, 1 = empty */
union {
CPU86_LDouble d __attribute__((aligned(16)));
MMXReg mmx;
} fpregs[8];
/* emulator internal variables */
float_status fp_status;
CPU86_LDouble ft0;
float_status mmx_status; /* for 3DNow! float ops */
float_status sse_status;
uint32_t mxcsr;
XMMReg xmm_regs[CPU_NB_REGS];
XMMReg xmm_t0;
MMXReg mmx_t0;
target_ulong cc_tmp; /* temporary for rcr/rcl */
/* sysenter registers */
uint32_t sysenter_cs;
target_ulong sysenter_esp;
target_ulong sysenter_eip;
uint64_t efer;
uint64_t star;
uint64_t vm_hsave;
uint64_t vm_vmcb;
uint64_t tsc_offset;
uint64_t intercept;
uint16_t intercept_cr_read;
uint16_t intercept_cr_write;
uint16_t intercept_dr_read;
uint16_t intercept_dr_write;
uint32_t intercept_exceptions;
uint8_t v_tpr;
uint64_t tsc;
uint64_t pat;
/* exception/interrupt handling */
int error_code;
int exception_is_int;
target_ulong exception_next_eip;
target_ulong dr[8]; /* debug registers */
union {
CPUBreakpoint *cpu_breakpoint[4];
CPUWatchpoint *cpu_watchpoint[4];
}; /* break/watchpoints for dr[0..3] */
uint32_t smbase;
int old_exception; /* exception in flight */
CPU_COMMON
/* processor features (e.g. for CPUID insn) */
uint32_t cpuid_level;
uint32_t cpuid_vendor1;
uint32_t cpuid_vendor2;
uint32_t cpuid_vendor3;
uint32_t cpuid_version;
uint32_t cpuid_features;
uint32_t cpuid_ext_features;
uint32_t cpuid_xlevel;
uint32_t cpuid_model[12];
uint32_t cpuid_ext2_features;
uint32_t cpuid_ext3_features;
uint32_t cpuid_apic_id;
/* MTRRs */
uint64_t mtrr_fixed[11];
uint64_t mtrr_deftype;
struct {
uint64_t base;
uint64_t mask;
} mtrr_var[8];
/* For KVM */
uint64_t interrupt_bitmap[256 / 64];
/* in order to simplify APIC support, we leave this pointer to the
user */
struct APICState *apic_state;
} CPUX86State;
每一个寄存都可以在这个结构体中找到相应的成员。当然这个结构体中还包含了一些qemu内部使用的变量。
当虚拟的CPU复位后,qemu会调用一个叫cpu_reset的函数,在这个函数中将这个虚拟CPU的寄存器复位:
/* NOTE: must be called outside the CPU execute loop */
void cpu_reset(CPUX86State *env)
{
int i;
if (qemu_loglevel_mask(CPU_LOG_RESET)) {
qemu_log("CPU Reset (CPU %d)\n", env->cpu_index);
log_cpu_state(env, X86_DUMP_FPU | X86_DUMP_CCOP);
}
memset(env, 0, offsetof(CPUX86State, breakpoints));
tlb_flush(env, 1);
env->old_exception = -1;
/* init to reset state */
#ifdef CONFIG_SOFTMMU
env->hflags |= HF_SOFTMMU_MASK;
#endif
env->hflags2 |= HF2_GIF_MASK;
cpu_x86_update_cr0(env, 0x60000010);
env->a20_mask = ~0x0;
env->smbase = 0x30000;
env->idt.limit = 0xffff;
env->gdt.limit = 0xffff;
env->ldt.limit = 0xffff;
env->ldt.flags = DESC_P_MASK | (2 << DESC_TYPE_SHIFT);
env->tr.limit = 0xffff;
env->tr.flags = DESC_P_MASK | (11 << DESC_TYPE_SHIFT);
cpu_x86_load_seg_cache(env, R_CS, 0xf000, 0xffff0000, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_CS_MASK | DESC_R_MASK);
cpu_x86_load_seg_cache(env, R_DS, 0, 0, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_W_MASK);
cpu_x86_load_seg_cache(env, R_ES, 0, 0, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_W_MASK);
cpu_x86_load_seg_cache(env, R_SS, 0, 0, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_W_MASK);
cpu_x86_load_seg_cache(env, R_FS, 0, 0, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_W_MASK);
cpu_x86_load_seg_cache(env, R_GS, 0, 0, 0xffff,
DESC_P_MASK | DESC_S_MASK | DESC_W_MASK);
env->eip = 0xfff0;
env->regs[R_EDX] = env->cpuid_version;
env->eflags = 0x2;
/* FPU init */
for(i = 0;i < 8; i++)
env->fptags[i] = 1;
env->fpuc = 0x37f;
env->mxcsr = 0x1f80;
memset(env->dr, 0, sizeof(env->dr));
env->dr[6] = DR6_FIXED_1;
env->dr[7] = DR7_FIXED_1;
cpu_breakpoint_remove_all(env, BP_CPU);
cpu_watchpoint_remove_all(env, BP_CPU);
}
1.3 实模式
X86工作于实模式或者保护模式是由CR0这个寄存器的最后一位来控制的,在初始化的时候,QEMU将其设置为0x6000 0010,对照这个寄存器中的各个位的意义:

最后一位的值为0,即表示CPU进入实地址模式。
1.4 CPU类型
X86复位后,在EDX寄存器中保存CPU类型的信息,这个寄存器各个位的意义如下:
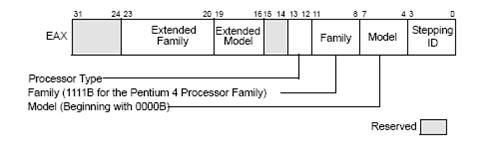
在默认不指定要仿真的CPU类型时,Qemu将此寄存器的值初始化为0x0000 0633,其数据来源为:
{
/*.name =*/ "qemu32",
/*.level =*/ 2,
/*.vendor1 =*/ 0,
/*.vendor2 =*/ 0,
/*.vendor3 =*/ 0,
/*.family =*/ 6,
/*.model =*/ 3,
/*.stepping =*/ 3,
/*.features =*/ PPRO_FEATURES,
/*.ext_features =*/ CPUID_EXT_SSE3,
/*.ext2_features =*/ 0,
/*.ext3_features =*/ 0,
/*.xlevel =*/ 0,
/*.model_id =*/ "QEMU Virtual CPU version " QEMU_VERSION,
},
当然,QEMU还支持其它类型的CPU,如coreduo的类型定义为:
{
/*.name =*/ "coreduo",
/*.level =*/ 10,
/*.vendor1 =*/ 0,
/*.vendor2 =*/ 0,
/*.vendor3 =*/ 0,
/*.family =*/ 6,
/*.model =*/ 14,
/*.stepping =*/ 8,
/* The original CPU also implements these features:
CPUID_DTS, CPUID_ACPI, CPUID_SS, CPUID_HT,
CPUID_TM, CPUID_PBE */
/*.features =*/ PPRO_FEATURES | CPUID_VME |
CPUID_MTRR | CPUID_CLFLUSH | CPUID_MCA,
/* The original CPU also implements these ext features:
CPUID_EXT_VMX, CPUID_EXT_EST, CPUID_EXT_TM2, CPUID_EXT_XTPR,
CPUID_EXT_PDCM */
/*.ext_features =*/ CPUID_EXT_SSE3 | CPUID_EXT_MONITOR,
/*.ext2_features =*/ CPUID_EXT2_NX,
/*.ext3_features =*/ 0,
/*.xlevel =*/ 0x80000008,
/*.model_id =*/ "Genuine Intel(R) CPU T2600 @ 2.16GHz",
},
1.5 启动CPU的选择
X86启动时会执行MP协议选择一个CPU启动,其余的进入等待,为此,QEMU做了相应处理:
for(i = 0; i < smp_cpus; i++) {
env = cpu_init(cpu_model);
if (!env) {
fprintf(stderr, "Unable to find x86 CPU definition\n");
exit(1);
}
if (i != 0)
env->halted = 1;
if (smp_cpus > 1) {
/* XXX: enable it in all cases */
env->cpuid_features |= CPUID_APIC;
}
qemu_register_reset(main_cpu_reset, env);
if (pci_enabled) {
apic_init(env);
}
}
当i不为0的时候,虚拟CPU的halted标记被置1,即不执行。
1.6 第一条指令的执行
在上述工作完成后,CPU将执行cs:ip指定的第一条指令,看看前面的复位代码可知此时CS值为
Selector = F000H
Base = FFFF0000H
Limit = FFFFH
AR = Present, R/W,
Accessed
而EIP的值则为0000FFF0H。
由于此时CPU工作在实模式,因而第一条指令地址CS:IP指向的位置为FFFF0H,也就是UMA临近结尾的位置。之所以选择这个位置是因为,这样就不会引起由于ROM的大小改变而造成的兼容性问题。既然FFFF0h到UMA结束的位置之后只有16个字节,所以这里只放置着一个Jump指令,以进一步跳转到真正的BIOS startup program的位置。(不同的BIOS厂商可以将其放在不同的位置,只需要通过font-family: Times New R