【STM32 .Net MF开发板学习-13】用PWM驱动智能小车
这段时间一直忙着开发基于.NET Micro Framwork系统的远程医疗系统(参见:http://space.cnblogs.com/group/topic/41835/),所以隔了近一个礼拜的时间,才有精力继续研究PWM驱动智能小车的问题。
以前对步进电机和直流电机的控制了解不深,以为仅对步进电机而言,才能进行PWM控制,及到购买相关的驱动板和步进电机后,才发现由于驱动板的原因,控制步进电机的方向、速度只能通过IO控制,相关内容请参见我以前写的博文《步进电机控制(非PWM模式)》。
在介绍具体的控制代码之前,为了便于更深入的了解PWM控制直流电机的机制,我们先粗略了解一下H桥驱动直流电机的原理。
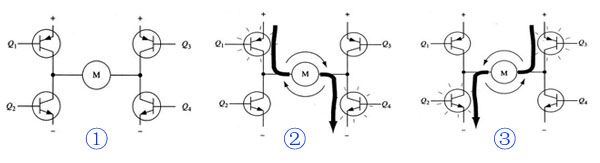
(1)、H桥式电机驱动电路包括4个三极管和一个电机;
(2)、导通Q1和Q4,电流从Q1经电机流到Q4,电机顺时针转动;
(3)、导通Q3和Q2,电流从Q3经电机流到Q2,电机逆时针转动;
(4)、电流的大小,决定了电机的转速,通过PWM的占空比(电流通断比)来决定电流的大小,从而间接控制了电机的转速。
当然为了提高驱动能力三级管会换为MOS管,不过其原理都是一样的。但是实际使用的时候,用分立元件制作H桥是很麻烦的,现在都是采用封装了H桥的集成电路芯片,如比较常用芯片有L293B、L293D、L298N、TA7257P、SN754410等。
更多关于H桥的相关知识,请参见如下文章:
(1)、《关于直流电机 H 桥驱动方案的选择》
(2)、《H桥及直流电机驱动电路详述文档信息》
(3)、《直流电机的PWM冲调速控制技术》
我们目前所选用的四路直流电机驱动器,其核心芯片就是L293B芯片,每个芯片集成了两个H桥电路,可以同时控制两路直流电机。

L293B芯片的原理图如上图所示,内含两路H桥,四路输入,两路方向控制,两路PWM控制。
实际应用发现,让直流电机正反转有如下组合控制(仅以A路示例)
(1)、A 向 高电平输入 PWMA 输入PWM方波 直流电机正向旋转
(2)、A向 低电平输入 PWMA 输入PWM方波 直流电机反向旋转
(3)、A向和PWMA交换,A向输入PWM方波,PWMA保持高电平或低电平
不同的组合,不同的控制方式,则直流电机的运转方向不同,并且有的组合PWM占空比高,反而转速低,而有的就是占空比高,则转速也高。
 和红牛开发板的具体接线如下:
和红牛开发板的具体接线如下:
M1_S – PA6 (TIM3_CN1)
M1_D – PA4
M2_S – PA7 (TIM3_CN2)
M2_D – PA5
智能小车,我们选用相对低价,且比较容易安装红牛开发板的小车底盘,共有两种组装方案,如下图所示,我比较倾向推荐第二种组装方案。

(1)、小车底盘散件;
(2)、安装后的小车;
(3)、.NET Micro Framework开发板固定到小车底盘上(蓝色区为安装固定位置)
(4)、不用小车上层板,直接用铜轴固定开发板;
驱动板供电,可以直接选择9V的电池,不过开发板也需要另行购买5V左右的电池。此外也可以购买6节普通的5号充电电池(3节给开发板供电,3+3节给驱动板供电),通过电池盒给驱动板和开发板供电。
由于底层我已经封装了PWM驱动库,所以用C#开发小车的控制代码,将非常的容易,本示例的代码如下:
public static void Main()
{
PWM pwm = new PWM(PWM.Timer.T3, 1000, 100);
OutputPort Lc = new OutputPort((Cpu.Pin)GPIO_NAMES.PA4, false);
pwm.Start(PWM.Channels.CH1, 50, PWM.Mode.PWM1); //PA6
OutputPort Rc = new OutputPort((Cpu.Pin)GPIO_NAMES.PA5, false);
pwm.Start(PWM.Channels.CH2, 90, PWM.Mode.PWM1); //PA7
while (true)
{
Thread.Sleep(1000);
}
}
我们选用Timer3进行PWM输出,查看开发板原理图,Timer3的第一路PWM输出的管脚为PA6,第二路为PA7,我们选择PA4和PA5作为方向控制。
函数简介:
(1)、PWM声明
public PWM(PWM.Timer timer, uint f, ushort count);
timer – 芯片时钟,可选Timer2,Timer3,Timer4,Timer5;
f – PWM输出频率,一般建议1000以上,不过几百也可以,网友可以自行测试。
Count – 计数(可看成占空比的分母)
(2)、PWM开始输出
public int Start(PWM.Channels ch, ushort dutyCycle, PWM.Mode mode);
ch – PWM通道,可有四路通道
dutyCycle – 可看成占空比的分子
mode – pwm输出方式,可以是方波,也可以强制为高或低;
(3)、PWM停止输出
public int Stop(PWM.Channels ch);

(运行时的截图)
小车的运行视频:http://video.sina.com.cn/v/b/37930017-1804832611.html
由于目前还没有考虑添加遥控设备,所以我们只能先让智能小车进行转圈了,后续文章我会考虑添加无线控制设备,使我们可以远程控制小车的行进及快慢。
附:网友写的相关文章《MF控制小车(PWM驱动直流电机)》:
http://blog.csdn.net/fangyuantdy/archive/2010/08/29/5848506.aspx
【本文相关模块或组件】
(1)、小车底盘
http://item.taobao.com/item.htm?id=7218838776
(2)、四路直流电机驱动器
http://item.taobao.com/item.htm?id=7218717808
(3)、.NET Micro Framework开发板
http://item.taobao.com/item.htm?id=7117999726
(4)、双排阵
http://item.taobao.com/item.htm?id=7167440992
(5)、电池盒
http://item.taobao.com/item.htm?id=7234239692
http://item.taobao.com/item.htm?id=7233955466
(6)、电源插头
http://item.taobao.com/item.htm?id=7254102440
(7)、杜邦线
http://item.taobao.com/item.htm?id=7233742386
此外尤值得一提的是,目前微软官方越来越凸显对.NET Micro Framework的重视,在MSDN微软中文技术论坛专门开辟了.NET Micro Framework栏目。
Windows Embedded 嵌入式技术论坛链接地址如下:
http://social.msdn.microsoft.com/Forums/zh-CN/category/embeddedtechnologycn
注:需要红牛开发板固件在 V0.9.9以上
本文源码:http://www.sky-walker.com.cn/yefan/MFV40/SourceCode/PWMCar.rar
MF快速参考: .NET Micro Framework 快速入门
MF中文讨论组:http://space.cnblogs.com/group/MFSoft/
微软官方论坛:MSDN微软中文技术论坛(.NET Micro Framework)
开发板简明手册:http://blog.sina.com.cn/s/blog_6b938f630100kh0k.html
【低价开发板】http://item.taobao.com/item.htm?id=7117999726